�����_�P����늄әCֱ���D�ؿ���
�~��1���ܱ���2
(1�L����W���������710064��2������ͨ��W���������710049)
ժҪ���齵���D���}�ӣ���������_�P����늄әCֱ���D�ؿ���ԭ�������E�͌��F���������b�Б�늄әCֱ���D�ؿ���˼�룬����������Чԭ�t�ƌ������A�������׃����ꇣ�ָ���������˷ֽⷨ���õĴ�朷�ֵ������׃�Q�����÷�ֵ��1.4����ᘌ�����߅�ε�늉����gʸ���������˴���c늉�ʸ������Ӱ��Pϵ���OӋ���_�Pʸ����������͌���о��Y��������ֱ���D�ؿ��Ƶ��D�ط��B�`��ɿ�����5�������ȣ����ֽ�Q���_�P����늄әC�D���}�Ӵ�Ć��}��
�P�I�~���_�P����늄әC��ֱ���D�ؿ��ƣ�����׃�Q���_�P늉�ʸ��
�ЈD���̖��TM352 �īI���R�a��A ���¾�̖��1004��7018(2010)05��0045��04
0�� ��
�_�P����늄әC(���º��QSRM)�����Y���o���ι̡����·���Ρ��ɱ��͡����ܿɿ������ҿ��Է���،��F�������Ƶ����cʹ����m��늄�܇�v�ĸ��N���r�\�У���늄�܇�v��****�Н����ęC�N����SRM��****ȱ�c���D���}�Ӵ�������ν���SRM���D���}�ӣ��M����Q����SRM������늄���܇���P�I���g[1-2]��ֱ���D�ؿ������齵���D���}�ӵ���Ч�ֶΣ��ڸБ�늄әC���ѵõ��V�����á��Б�늄әC�Ą�Ş�Ҏ�t���������ҽ���늣���SRM�����������p�O�Y����ֱ��늉���ţ���������հ�Б�늄әCֱ���D�ؿ�����Փ��
1����SRMֱ���D�ؿ���
1985���������W�ĵ������_��(Depenbro��ck)�����״������ֱ���D�ؿ��Ƶ���Փ��ֱ���D�ؿ����ÿ��gʸ����������,ֱ���ڶ�������ϵ��Ӌ���c���ƽ���늄әC���D�أ����ö��Ӵň����������xɢ�ă��cʽ�{��(B B����)�a��PWM��̖��ֱ�ӌ���׃�����_�P��B�M��****���ƣ��ԫ@���D�صĸ߄ӑB���ܡ�
1.1����SRM늉�ʸ��
����SRM늉�ƽ�ⷽ�̣�SRMÿ��늉��c˲�r���ʸ�����̞飺
ʽ�У������@�M��朣�u���@�M��늉���R���@�M��裻i���@�M���������늙C�@�M���R����ʽ(1)���ɲ����ʽ��
��ʽ(2)���Կ�����˲�r��朵�׃�������c���Ӷ���˲�r늉�ʸ���ķ���һ�¡�����SRM˲�r늉�ʸ���Ķ��x��D1��ʾ�����^��ָ��������
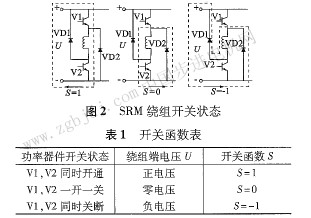
�ڂ��y�IJ����Q���ĆΘO�Թ���׃�Q����[5]�����چ�һ������@�M�����������ͬ���_�P��B��ÿ���@�M�����N���ܵ�늉���B����D2��ʾ�������_�P����si(i=1��2��3��4)�Ķ��x���1��ʾ��
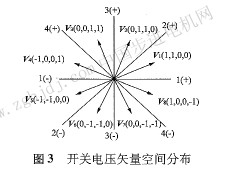
�ɱ�1��֪������sRM����׃�Q�����_�Pģʽ����3��3��3��3=81�N�M�ϡ��麆�����㣬�x������8����ֵ��ȡ����g����45�����_�P늉�ʸ������D3��ʾ��늉�ʸ���]��ʹ����ʸ������ʸ����Ҫ���ڹ��ϱ��o��ͣa�C������
1.2��机ϳ�
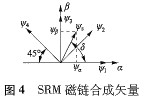
�c�Б�늄әC�ֲ��@�M�����Ĵ�朷ֲ���ͬ���ϼ����@�M��늵�sRM�����@�M��朼��зֲ��ڶ��ӴŘO�ϣ��c�D��λ�����P���麆�����㣬���Լ�����ඨ���@�M�Ĵ�朹̶��ڸ��ඨ���@�M���ڴŘO�����ľ��ϣ���˽����o
ֹ�Ħ�һ������ϵ[6-7]����D4��ʾ��
���������늙C��Ч�ėl���ǚ�϶�Юa���Ĵ�ͨ��ȣ�����
N2��N4�քe����������늙C�@�M����Ч�є����ON4=N2.
��ʽ��3���ɵã�