����ģ�ͅ������m��(y��ng)�Į���늄�(d��ng)�C(j��)�o�ٶȂ�����DTC
������
(��������W(xu��)Ժ���������471023)
ժҪ��������߶��Ӵ�朵��^�y(c��)���ȣ����]�h(hu��n)����^�y(c��)������ֱ���D(zhu��n)�ؿ���ϵ�y(t��ng)��ȡ�����y(t��ng)�ļ��e�������ڴ���]�h(hu��n)�^�y(c��)���Ļ��A(ch��)�ϣ�����(j��)ģ�ͅ������m��(y��ng)��Փ(MRAs)��(g��u)������ٶ����m��(y��ng)�^�y(c��)��������͌�(sh��)�(y��n)�Y(ji��)��������ԓ�����ɹ��،�(sh��)�F(xi��n)��(du��)�D(zhu��n)�ٵı��R(sh��)���C���˷����Ŀ����ԡ�
�P(gu��n)�I�~��ģ�ͅ������m��(y��ng)��ֱ���D(zhu��n)�ؿ��ƣ�����^�y(c��)�����ٶ����m��(y��ng)�^�y(c��)��
��Ȧ���̖(h��o)��TM343 �īI(xi��n)��(bi��o)�R(sh��)�a��A ���¾�̖(h��o)��1004��7018f2010)osһ0063��04
0����
ֱ���D(zhu��n)�ؿ��Ƽ��g(sh��)���^ʸ�����Ƽ��g(sh��)֮��l(f��)չ������һ�N����늄�(d��ng)�C(j��)׃�l�{(di��o)�ټ��g(sh��)��ֱ���D(zhu��n)�ؿ���ϵ�y(t��ng)���������y����ߵ���Ҫԭ���ǵ��ٕr(sh��)���Ӵ���y�Ԝ�(zh��n)�_�^�y(c��)�����y(t��ng)�ķ����Dz��ü��e����(U-Iģ��)�������^�y(c��)�������e�������������`��e���Լ�ֱ��ƫ�Ɔ��}�������Ǯ���늄�(d��ng)�C(j��)�\(y��n)���ڵ��ٕr(sh��)�@Щ���}׃�÷dz���(y��n)�أ�ʹ�ö��Ӵ���ڵ��D(zhu��n)���µ��^�y(c��)׃�ò���(zh��n)�_���Ķ�ʹֱ���D(zhu��n)�ؿ�ϵ�y(t��ng)�ڵ��D(zhu��n)���µĿ��������ܵ�Ӱ푡����˝M������ܽ�������(d��ng)����Ҫ����(du��)�ٶ��M(j��n)���]�h(hu��n)���ƣ����ٶȂ������İ��b������ϵ�y(t��ng)�ď�(f��)�s�ԣ�������ϵ�y(t��ng)��
�ɿ��Ժ������ԣ�������Tϵ�y(t��ng)�ɱ��;S�o(h��)Ҫ���������]�h(hu��n)����^�y(c��)��ȡ�����y(t��ng)�ļ��e�������^�y(c��)���Ӵ�朣�ģ�ͅ������m��(y��ng)��Փ(MRAS)��(g��u)������ٶ����m��(y��ng)�^�y(c��)����(sh��)�F(xi��n)��(du��)�ٶȵĹ�Ӌ(j��)�����(du��)ԓ�o�ٶȂ���������늄�(d��ng)�C(j��)DTCϵ�y(t��ng)�M(j��n)�з���͌�(sh��)�(y��n)������͌�(sh��)�(y��n)�Y(ji��)���C����ԓ���������_�ԡ�
1ֱ���D(zhu��n)�ؿ��ƵĹ���ԭ��
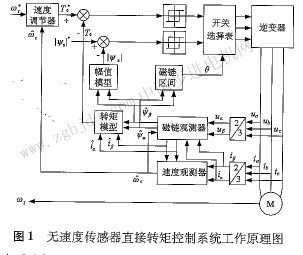
�D1�ǟo�ٶȂ�����ֱ���D(zhu��n)�ؿ���ϵ�y(t��ng)�Ĺ���ԭ��D���������࣯����(3s��2s)����(bi��o)׃�Q�ѱ��y(c��)��
����늉�ua��ub��uc���������ia��ib��ic׃�Q���ڦ���������(bi��o)ϵ�µ�늉�u����u�º����i����i�£�ͨ�^����^i�Ԝy(c��)���õ����������¡��ɦ��������¡�i����i���γ��D(zhu��n)��ģݔ�������D(zhu��n)��Te���ɶ��Ӵ�朦����������γɴ�朷�ֵģ��ݔ�����Ӵ�朷�ֵ|��s|�����Ùz�y(c��)����늙C(j��)�D(zhu��n)���c�o���D(zhu��n)��ͨ�^�D(zhu��n)���{(di��o)��(ji��)��ݔ���o���D(zhu��n)���ɣ����ڦ���������(bi��o)ϵ�µĴ�朷���ͶӰ�����ඨ���S���ϣ��õ���朅^(q��)�g�R(sh��)�e���Д�����Ӵ�����ڵą^(q��)�g�ȡ�Ȼ�����÷����D(zhu��n)��Te�c�o���D(zhu��n)��Te���^�γ��D(zhu��n)���_�P(gu��n)��̖(h��o)���c��ͬ�r(sh��)�����÷�����朷�ֵ|��s|�c�o����ֵ|��s|���^�γɴ���_�P(gu��n)��̖(h��o)��������(j��)��朅^(q��)�g���D(zhu��n)���_�P(gu��n)��̖(h��o)�ʹ���_�P(gu��n)��̖(h��o)��K�Q��늉����gʸ�����x���Ԍ�(sh��)�F(xi��n)��(du��)늙C(j��)��ֱ���D(zhu��n)�ؿ��ơ�
2�����ܶ��Ӵ���^�y(c��)��һȫ�A����^�y(c��)��
2��1����늄�(d��ng)�C(j��)�ڃ����oֹ����(bi��o)ϵ�µĄ�(d��ng)�B(t��i)��(sh��)�W(xu��)ģ��
�Զ����D(zhu��n)�Ӵ�朞��B(t��i)׃���Į���늄�(d��ng)�C(j��)��(sh��)�W(xu��)ģ������[4]:
2.2ȫ�A����]�h(hu��n)�^�y(c��)���Ą�(d��ng)�B(t��i)��(sh��)�W(xu��)ģ��
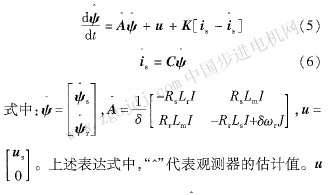
ͨ�^ʽ(1)��ʽ(2)�������Į���늄�(d��ng)�C(j��)�����ʽ늙C(j��)��(sh��)�W(xu��)ģ�ͣ����Ԙ�(g��u)���ͬ�r(sh��)�^�y(c��)���Ӵ�机Ͷ��������ȫ�A��朠�B(t��i)�^�y(c��)������ʽ����[4]��
�Ǡ�B(t��i)�^�y(c��)����ݔ�룬ݔ����is��K���^�y(c��)�������ꇡ��^�y(c��)�������һ�(xi��ng)�ǰ����^�y(c��)ݔ��is�c늙C(j��)�挍(sh��)ݔ��is�������(xi��ng)����������K�ә�(qu��n)��ꇵ����ã����������^�y(c��)���õĶ����D(zhu��n)�Ӵ�朠�B(t��i)׃������(d��ng)�^�y(c��)��ģ��ʹ�õľ��A�͌�(sh��)�Hϵ�y(t��ng)�ľ��A֮�g���ڲ�r(sh��)����Ȼ��(hu��)��(d��o)���^�y(c��)��ݔ��is�c��(sh��)�Hݔ��is֮�g����ƫ��ڴ���r�£�ԓ���ӵ�|��s|�c�o����ֵ|��s|���^�γɴ���_�P(gu��n)��̖(h��o)��������(j��)��朅^(q��)�g���D(zhu��n)���_�P(gu��n)��̖(h��o)�ʹ���_�P(gu��n)��̖(h��o)��K�Q��늉����gʸ�����x���Ԍ�(sh��)�F(xi��n)��(du��)늙C(j��)��ֱ���D(zhu��n)�ؿ��ơ�
2�����ܶ��Ӵ���^�y(c��)��һȫ�A����^�y(c��)��
2��1����늄�(d��ng)�C(j��)�ڃ����oֹ����(bi��o)ϵ�µĄ�(d��ng)�B(t��i)��(sh��)�W(xu��)ģ��
�Զ����D(zhu��n)�Ӵ�朞��B(t��i)׃���Į���늄�(d��ng)�C(j��)��(sh��)�W(xu��)ģ������[4]:
2.2ȫ�A����]�h(hu��n)�^�y(c��)���Ą�(d��ng)�B(t��i)��(sh��)�W(xu��)ģ��
ͨ�^ʽ(1)��ʽ(2)�������Į���늄�(d��ng)�C(j��)�����ʽ늙C(j��)��(sh��)�W(xu��)ģ�ͣ����Ԙ�(g��u)���ͬ�r(sh��)�^�y(c��)���Ӵ�机Ͷ��������ȫ�A��朠�B(t��i)�^�y(c��)������ʽ����[4]��

| �؏�(f��)�� q1q1q1 �؏�(f��)�r(sh��)�g��2010-6-28 7:57:31 |
|
��1�� |
|
| ����ģ�K����IGBT���՚W�ɿ˻������T�����ա�
--------------------
�߃r(ji��)��ُԭ�bģ�K����C(j��)ģ�K��13544123655 ��
--------------------------------------------------------
�߃r(ji��)�F(xi��n)����չ��S�W�ɿˡ����T�������⡢��ʿ�ȸ�Ʒ�Ʋ�C(j��)��ԭ�bģ�K��
��Ҫ̎����a(ch��n)Ʒ������Ո(q��ng)(li��n)ϵ�ң��ю��Q�ɬF(xi��n)�𣬞����Y�����R�ػ\�ĺ����⡣
QQ��893884513
E-mail:893884513@qq.com
�Ԓ��135-4412-3655(����) ���� |
|