����������Փ���ƄәC���˽�ģ�c����
���t��12�����c��1
��1�����������ˌW�Ԅӻ��WԺ������100081��2����������W늚ⶡ���c�Ԅӻ��WԺ�����Ͻ���454000)
ժ Ҫ�����˽�Q�ƄәC��������ϵ�y(t��ng)�д��ڲ��ɷe�\�Ӽs��������ֱ�ӑ���������Փ��ģ�Ć��}��ͨ�^��(g��u)��̓�M�B�U���Ȱ��ƄәC�����D(zhu��n)���ɵȃr�Ĺ̶��������ɶ��P(gu��n)��(ji��)���_朙C���ˣ�Ȼ������\��������Փ�������ƄәC���˵��\��ģ�ͣ����ƄәC����ϵ�y(t��ng)��ģ�ṩ��һ����������;�����������������ƄәC�����\��ģ�ͣ��O(sh��)Ӌ��һ����(w��n)����ݔ����ۙ����������matlab���ƄәC���˵Ľ�ģ�Ϳ����M���˷��棬��C��������Ľ�ģ�����Ŀ����ԡ�
�P(gu��n)�I�~���ƄәC���ˣ�������Փ��̓�M�B�U����ۙ����
�ЈD���̖��tp 27 �īI���R�aia
l����
��������ܷ������s���ƄәC���˵Ŀ��Ƶõ��ˏV�����о����īI[1]������һ�N��݆�ƄәC�����\�Ӻ̈́����W��ģ��������ӑՓ��ϵ�y(t��ng)���������O(sh��)Ӌ���}���īI[2]�����˸��N�ƄәC�����\�Ӻ̈́ӑB(t��i)ģ�͵ĽY(ji��)��(g��u)���Ժͷ�����ƄәC�����ṩ��һ�Nͨ�õĽ�ģ�������˺��P(gu��n)���ƄәC���˿��Ƶ��īI�����������@�Nģ�͡����^ȥ��ʮ����˂���ֵ��о��˹̶����_朙C���˵�ϵ�y(t��ng)����ģ��������ţ�Dһ�W����������d-h�B�U����ϵ���������շ��ȣ������@Щ��ģ����ֻ�m����ÿ���P(gu��n)��(ji��)ֻ��һ�����ɶȵĹ̶����_朙C���ˣ������ƄәC�����@�N�ǹ̶����Ͷ����ɶ��P(gu��n)��(ji��)��ϵ�y(t��ng)�@Щ��ģ���������m�á����������һ�N�µ��ƄәC���˽�ģ������ͨ�^��(g��u)��̓�M�B�U�����Ȱ��ƄәC�����D(zhu��n)����ȃr�Ĺ̶��������ɶ��P(gu��n)��(ji��)���_朙C���ˣ�Ȼ������\��������Փ�����ƄәC���˵��\��ģ�ͣ����ƄәC���˵ȷǹ̶��������ɶ��P(gu��n)��(ji��)���wϵ�y(t��ng)�Ľ�ģ�ṩ��һ�N��;����
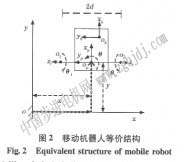
2�ƄәC����̓�M�B�U�ȃr�Y(ji��)��(g��u)
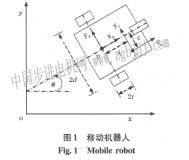
�о����ƄәC���ˣ���D1��ʾ��
���о������ɶ��P(gu��n)��(ji��)�ͷǹ̶��������wϵ�y(t��ng)�����W���īI[3]�״������̓�M�B�U�ĸ�����ε��f������ͨ�^��ԭϵ�y(t��ng)������̓�M�B�U���Ѷ����ɶ��P(gu��n)��(ji��)��ǹ̶���ϵ�y(t��ng)�D(zhu��n)���ɵȃr�Ĺ̶��������ɶ��P(gu��n)��(ji��)���_�ϵ�y(t��ng)��
��λ���ڑT������ϵoxyz�пɱ�ʾ��g=[x��y����]�����У�z��y��ʾ�ƄәC���˵�p�c�ڑT������ϵ�е����ˣ��ձ�ʾ�ƄәC���˹��B����ϵ��x�S�����c�T������ϵz�S����֮�g�ĊA�ǡ�
���O(sh��)�����DŽ��Եģ����ƄәC�����ڵ����ϵ��\�ӿ���һ������ƽ�渱�Ą��w�g���\�ӣ���ô�ƄәC���˺͵���֮�g�ʹ���һ�������ɶ��P(gu��n)��(ji��)���@�������ɶ��P(gu��n)��(ji��)Ω���������ƄәC�����ڑT������ϵ�е�λ�Ρ����挢�f��ͨ�^��(g��u)��̓�M�B�U�������ƄәC���˵��@�������ɶ��P(gu��n)��(ji��)�ȃr���D(zhu��n)����3���̶��������ɶ��P(gu��n)��(ji��)�����M�ϡ�
���ƄәC���˵�p�c�������B����ϵpx����zp=������R�����˱�ʾ�C���˵�λ�Σ���ô�ƄәC�����ڑT������ϵ�е�λ�����R��׃�Q��ꇱ�ʾ��
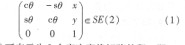
ʽ(1)�ɱ�ʾ��3���R��׃�Q��ꇵķe������
ʽ(2)�f�����ƄәC���˵�λ�ο���ͨ�^�ɴ��ؑT�������S��ƽ��׃�Q�͡������D(zhu��n)׃�Q��Ч�����ƄәC���˵������ɶ��P(gu��n)��(ji��)�ɵȃr�ı�ʾ��3�������ɶȹ̶����_��P(gu��n)��(ji��)�����M�ϣ���D2��ʾ��
�@�ӣ������ɶȷǹ̶������ƄәC���˾͵ȃr���D(zhu��n)�Q���˹̶��������ɶ��P(gu��n)��(ji��)���_朙C���ˣ����_朙C���˵Ľ�ģ�ж�N���^����ķ����������á�
3�\��������Փ
���o�������˺������˕r���c�C���˸��P(gu��n)��(ji��)���������\�����������ṩ�˙C�����\�ӌW����������(sh��)��ָ��(sh��)�e��ʽ�c�������c��Y(ji��)�ϣ�ʹ�û����\��������ָ��(sh��)�e |