����cpld�ğo(w��)ˢֱ������ϵ�y(t��ng)�O(sh��)Ӌ(j��)
�����ƣ��R���䣬�O�y��
(�������I(y��)��W(xu��)�Ԅ�(d��ng)���W(xu��)Ժ������710072)
ժҪ���O(sh��)Ӌ(j��)��һ�N���ڏ�(f��)�s�ɾ���߉����( cpld)�ğo(w��)ˢֱ��늄�(d��ng)�C(j��)����ϵ�y(t��ng)��ԓϵ�y(t��ng)����cpld��������������O��p���˷��xԪ����ʹ�á�����Ӳ�������Z(y��)��vhdl��ͨ�^(gu��)�O(sh��)Ӌ(j��)��Ƭ��(n��i)�Ĵ��a��(sh��)�F(xi��n)늙C(j��)�Q����ƣ���˾��ИO����`���ԡ��U(ku��)չ�Ժͷ�(w��n)���ԡ����¾�ϵ�y(t��ng)�O(sh��)Ӌ(j��)˼���M(j��n)����Ԕ��(x��)���U�������o��������(y��ng)��Ӳ���·�ͳ������̈D����(j��ng)�^(gu��)�{(di��o)ԇ�(y��n)�C��ԓ�O(sh��)Ӌ(j��)�����Ŀ����ԣ��·�Y(ji��)��(g��u)�o���������^�õĹ��̑�(y��ng)�Ãr(ji��)ֵ��
�P(gu��n)�I�~����(f��)�s�ɾ���߉�������o(w��)ˢֱ��늄�(d��ng)�C(j��)��vhdl
�ЈD���̖(h��o)��tm36 +1 �īI(xi��n)��(bi��o)־�a��a ���¾�̖(h��o)��1001-6848(2010)05-0070-03
o�� ��
�o(w��)ˢֱ��늄�(d��ng)�C(j��)( bldcm)����ӓQ��������ˢ�͓Q���������Ԍ�(sh��)�F(xi��n)�����ܡ��߿ɿ��ԡ��L(zh��ng)��������S�o(h��)��Ŀ�ġ���ֱ���ŷ��{(di��o)�ٿ���ϵ�y(t��ng)�У��ձ�����Ԇ�Ƭ�C(j��)��dsp�������ϵ�y(t��ng)��̎������(l��i)��(sh��)�F(xi��n)늙C(j��)�Ĕ�(sh��)�ֿ����㷨����ռ�ýӿ��YԴ�^�࣬�����������Ԫ����Ҳ�^�࣬�@��(du��)����(g��)ϵ�y(t��ng)�ď�(f��)�s�ԺͿɿ��Զ����^��Ӱ푡�
��cpld����bldcm���܉���p������·����(ji��)ʡ�YԴ����(sh��)�F(xi��n)�ھ����̺Ͳ�����ʹ�O(sh��)Ӌ(j��)�����`��ɿ��ȸ��ߣ�ϵ�y(t��ng)�Y(ji��)��(g��u)����o���������Ը���(qi��ng)�������ИO��ĔU(ku��)չ�Ժ�ͨ���ԡ����Ĕ����˻���cpld��bldcm����ϵ�y(t��ng)���O(sh��)Ӌ(j��)�c��(sh��)�F(xi��n)��������ɹ���(y��ng)���ں�ģ�������(q��)��(d��ng)ϵ�y(t��ng)�С�
1 ϵ�y(t��ng)�Ę�(g��u)�ɼ�����ԭ��
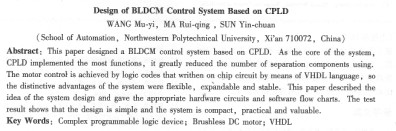
�D1�����ں�ģ�������(q��)��(d��ng)ϵ�y(t��ng)��bldcm���ƽY(ji��)��(g��u)��D��ϵ�y(t��ng)��Ҫ����������Сϵ�y(t��ng)( cpld)���(q��)��(d��ng)�·��������׃���·���z�y(c��)�·��bldcm�M�ɡ�
����(j��)���ܺ��w�eҪ��cpld�x��altera��˾���a(ch��n)��max7000sϵ��оƬ�������оƬ���(q��)��(d��ng)�·���Ì����(q��)��(d��ng)оƬir2130�����ڜpС�������w�e���|(zh��)���Ŀ��]����������׃��������mosfet(irfi4212h - 117p)�M�ɵ�����ȫ����?f��)�Y(ji��)��(g��u)�����ˌ�(sh��)�F(xi��n)ϵ�y(t��ng)���`���ԡ��U(ku��)չ�Ժ�ͨ���ԣ�ϵ�y(t��ng)�O(sh��)Ӌ(j��)�˔ز���ʽ�x��˿ڡ��������D(zhu��n)�x��˿ڡ��ⲿͨӍ�ӿں�δ���x���A(y��)�����ƶ˿ڵȡ��@�ӿ��Ժܷ���،�(du��)ϵ�y(t��ng)�M(j��n)�ДU(ku��)չ������(j��)��
ϵ�y(t��ng)��늺������M(j��n)���^(gu��)����Ƿ�����^(gu��)�ؙz�y(c��)������й��ϣ��tݔ��������̖(h��o)����t�z�y(c��)�_(k��i)�C(j��)��̖(h��o)pg(���x�_(k��i)�C(j��)����ƽ����(d��ng)pg��̖(h��o)��1�r(sh��)��Ȼ��z�y(c��)�ز���ʽ���ƶ˺��������D(zhu��n)�ГQ��̖(h��o)����������hall���D(zhu��n)��λ�Â�������̖(h��o)ha��hb��hc�ccpld��(n��i)���a(ch��n)����ռ�ձȞ�ٷ�֮5��pwm�M(j��n)��߉�ϳɣ��γ���·�{(di��o)�ƿ�����̖(h��o)��ͨ�^(gu��)�(q��)��(d��ng)�·�Ƅ�(d��ng)������ʽ��׃����ʹ늙C(j��)�_(k��i)ʼܛ����(d��ng)����(d��ng)ռ�ձȵ��_(d��)�ٷ�֮85�r(sh��)��ϵ�y(t��ng)�M(j��n)���ٶ��]�h(hu��n)��(w��n)���\(y��n)�Р�B(t��i)��ͨ�^(gu��)����hall�D(zhu��n)�ӂ�������̖(h��o)�g�әz�y(c��)��늙C(j��)�D(zhu��n)�ٷ���������̖(h��o)����(l��i)�{(di��o)��(ji��)pwm�}�_��ռ�ձȣ��M(j��n)����(sh��)�F(xi��n)늙C(j��)�D(zhu��n)�ٵķ�(w��n)�����ƣ�ͬ�r(sh��)��λ�C(j��)ͨ�^(gu��)��(sh��)��(j��)�������Ԍ�(du��)ϵ�y(t��ng)�M(j��n)�бO(ji��n)�ء�
2Ӳ���·�O(sh��)Ӌ(j��)
������Ӳ���·��Ҫ����������׃���·�����o(h��)�·���(q��)��(d��ng)�·��߉�C���·�M�ɡ����o(h��)�·��Ҫ��(sh��)�F(xi��n)�^(gu��)����Ƿ�����^(gu��)�����^(gu��)�صęz�y(c��)���o(h��)���(q��)��(d��ng)�·����ir2130�����·�(q��)��(d��ng)�����IJ���٘��������(du��)������׃���·��߉�C���·�M(j��n)���f(shu��)����
2.1������׃�·
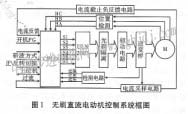
��������׃�·ԭ����D2��ʾ�����]��ģ�����w�e�����������ƣ�����������������_(k��i)�P(gu��n)�ܲ��õ͉��͌�(d��o)ͨ�����Ŀ���mosfet����ir-fi4212h-117p��
2.2߉�C���·�O(sh��)Ӌ(j��)
Ҫ��(sh��)�F(xi��n)����(g��)ϵ�y(t��ng)�Ŀ��ƹ��ܣ��P(gu��n)�I�nj�(du��)��·��̖(h��o)�M(j��n)�Џ�(f��)�s�ľC��߉̎��������߉�ϳɼ����ϱ��o(h��)�ȡ���(j��ng)������ϵ�y(t��ng)�x��altera��˾��cpldоƬepm7064sl����ȫ���Ԍ�(sh��)�F(xi��n)���Ϗ�(f��)�s߉���ơ�
ԓcpldоƬ�Ɍ�(du��)�_(k��i)�C(j��)���D(zhu��n)�ٽo�����ز����Ƅ�(d��ng)���D(zhu��n)���(q��)��(d��ng)��(du��)���x���Լ����N���o(h��)��̖(h��o)�M(j��n)��߉̎������Ɍ�(du��)늙C(j��)�D(zhu��n)��λ�Â�������̖(h��o)��ͨ�^(gu��)��(n��i)�����̮a(ch��n)����pwm��̖(h��o)�M(j��n)��߉�C�ϣ�����(sh��)�r(sh��)�a(ch��n)��������׃����·�{(di��o)���(q��)��(d��ng)��̖(h��o)��
3ܛ���O(sh��)Ӌ(j��)
|