����dsp�ğoˢֱ��늄әC����ϵ�y�OӋ
���i
�����ս������I�WԺ����c��Ϣ���̌WԺ������230601��
ժҪ��������OӋ����tms320f2812����ĵğoˢֱ��늄әC�{��ϵ�y�OӋ�c���F���������OӋ��������ģ�����������F�oˢֱ��늙C���{�٣��o���ˌ��Y���ͽYՓ��ԓ�����^֮���y���{�ٿ��Ʒ�����������߿��ƾ��ȣ����܉��������ݔ����׃���{�����������Y��������ԓϵ�y���Ѓ����Ŀ���Ч����
�P�I�~��tms320f2812��������ģ�����ƣ��oˢֱ��늄әC���{��ϵ�y
�ЈD���̖��tm36 +1 �īI��־�a��a ���¾�̖��1001-6848(2010)05-0103-03
0�� ��
�o��ֱ��늙C���H���н���늙C���w�eС�������p���T��С�����c�����ғ���ֱ��늄әC�������{�����ܣ����֛]�ЙCе�Q������ȱ�c�������Ҫ�����ڹ��S�Ի����k���Ԅӻ����ɣ�������Ѹ��ȡ�����y��ֱ��늙C�ͮ���늙C���ڸ߾��ȵĔ����O����C���˺͙Cе�ֵ����У��oˢֱ��늙C�đ���Ҳ�ஔ�ࡣ��˟oˢֱ��늙C�Ŀ��Ɔ��}�ɞ��о������c��
늙C�{��ϵ�y��õķ������p�]�hpid����������ԓ�������څ��������S�����،����׃�������������{�ٵ�ȱ�c����ģ�����ƺ�pid���Ƽ������������{��ϵ�y����һЩ����ģ���Եij��콛��Ҏ�t�ЙC�����뵽���Ʋ����У������^���������ԡ�����ȡģ��������Ȼ����һ���ϵij��{�F��ϵ�y�еIJ��_�����ؿ��Ʋ��Ǻܺã����B������Ȼ������ߡ����������һ�N��tms320f2812����ĵğoˢֱ��늄әC�{��ϵ�y�OӋ�c���F�ķ��������]Ӌ��������ģ�����������F�oˢֱ��늙C�{�٣��o���ˌ��Y���ͽYՓ��
1��������ģ�����Ƽ��g
��Ҏģ������������푑��r�g�̣����{��С�������Ժã��m�ڷǾ��ԕr׃�ď��sϵ�y������ģ���������ȃ��c����ͬ�rҲ߀����һЩ���}�����ȣ���Ҏ��ģ���������Ŀ���Ҏ�t����֮��̶���׃���y�ԫ@��****����ָ�ˡ�������늄әC�����^���@��s�ı��،������@�N���������ܫ@���A�ڵĿ���Ч���������m��ϵ�y�ͭh��׃���������
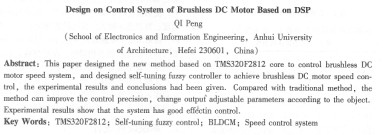
�ڱ����в��Å���������ģ���ؼ��g�����������\���^���еČ��Hƫ���ƫ��׃���ʵĴ�С���������xȡ��ͬ�ı������ӡ��@�N���������������������{�������㷨���θ�Ч������Ч���^�á��Y����D��D1��ʾ��
ģ�����������ö��Sģ�����ƣ���ģ�����Ɔ�Ԫ��ģ�������������Ɔ�Ԫ���ԟoˢ늄әC��ݔ������c����ֵ��ƫ��e��ƫ��׃����ec����ݔ��׃����ģ�������������Ɔ�Ԫ��ݔ�����{������k1��k2��k3�քe��ʾ��������ke��kec�Լ���������ka���{��ϵ�yֵ��e��ec�Լ�ģ�M��������ݔ������Փ��ȡ{ -4��-3��-2��-1��0��+1��+2��+3��+4}���֞�7��ģ���Ӽ���k1ģ���Z��׃���x��7����nb��nm��ns��zo��ps��pm��pb����ģ��ʹ�����ķ������1����4��ʾ
��e�͚��^��r���sСk1��k2�����͌���ƫ��ķֱ��ʣ��p��ƫ��s���^���^�̕r�g����e��ec�^С�r��ϵ�y�ѽӽ����B���@�r������k1��k2�����ϵ�y��Сƫ��ķֱ��ʣ���߿��Ƶ��`���ȣ����`��e�^�����c�`��׃��ec��̖�෴�r�����m������������Ĵ�С�����`��e�^�����c�`��׃��ec��̖��ͬ�r�����m���pСk3ϵ�y푑��ڛ]��ֵ�����r���˕r�`��e�^С�������ֹ�a���^��ij��{��Ƿ�{��k3��ԓ�����^����׃���������m���pС���������ԜpС���{����������������ԭ�t�����ԫ@���^�õĿ���Ч����
2ϵ�yӲ���OӋ
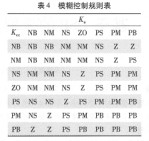
tms320f2812��32λ�Ŀ��ƌ��á��Ⱥ��W���Լ����_150 mips�Ĕ�����̖̎���������V�鹤�I�Ԅӻ����Ԅӻ����Ƶȑ��ö��OӋ��ϵ�y�Y����D��D2��ʾ��
ϵ�y����ԭ������������������D�Q��ֱ��늣�һ���ֽ��^����ģ�K������dspоƬ���������ذ�����������Ĺ���Դ��һ�������� |