�o(w��)ˢֱ��늙C(j��)���}���{(di��o)���µ��D(zhu��n)���}��(d��ng)����
�Ϲ₥�����(sh��)�� �ܺ�
(��܊���̴�W(xu��)늚��ϵ��������h430033)
ժҪ�������o(w��)ˢֱ��늙C(j��)(BLDcM)��(w��n)�B(t��i)�Q���D(zhu��n)���}��(d��ng)�c�D(zhu��n)�ٵ��P(gu��n)ϵ���_���Q��І�(w��n)�c늘��������늄�(sh��)֮�g���P(gu��n)ϵ�������}��ͱ��(PwM)��ʽ��(du��)i������B(t��i)������(d��o)ͨBl��cM����ϵ�y(t��ng)��Ӱ푣��������PwM ON��PwM(ǰ30���ͺ�30���M(j��n)��PwM���ƣ����g60�����ֺ�ͨ)��ʽ�µ��D(zhu��n)���}��(d��ng)�a(b��)�����ơ�ԓ���Ʋ����܉���ȫ�����ǓQ�����������P(gu��n)��Ͱ���F(xi��n)���l�������늴��D(zhu��n)���}��(d��ng)��߀�܉���ȫ�a(b��)�����ړQ���������D(zhu��n)���}��(d��ng)����(sh��)�F(xi��n)늙C(j��)�ڵ��ٺ��ٕr(sh��)�ğo(w��)�D(zhu��n)���}��(d��ng)���ơ�
�P(gu��n)�I�~���o(w��)ˢֱ��늙C(j��)���D(zhu��n)���}��(d��ng)���}���{(di��o)���ЈD���(l��i)̖(h��o)��TM 33�īI(xi��n)��(bi��o)־�a��A���¾�̖(h��o)
0 ����
�o(w��)ˢֱ��늙C(j��)(Bmshless Dc M0tor��BLDcM)����Y(ji��)��(g��u)��(ji��n)�Ρ��{(di��o)�����ܺá������ܶȸߡ����������ƺ�(ji��n)�ε����c(di��n)���õ���Խ��(l��i)Խ�V���đ�(y��ng)�á��������β���늄�(d��ng)��(sh��)(ƽ플��ȡ�120��)BLDcM�D(zhu��n)���}��(d��ng)�����Ƽ��������ܵĸ���һֱ���о��ğ��c(di��n)��
BLDcM���Թ����ڸ��N�}���{(di��o)��(Pulsewidth M0dulaLion��PwM)ģʽ�£���ͬ��PwMģʽ������Ӱ푹����_(k��i)�P(gu��n)�ܵĄ�(d��ng)�B(t��i)�p���cɢ������ԣ����Ҍ�(du��)�D(zhu��n)���}��(d��ng)��Ӱ�Ҳ�ܴ�ͨ�^(gu��)��׃ֱ��ĸ��(xi��n)�ز����ơ������ַǓQ��������ĺ㶨������Ч���ƓQ���D(zhu��n)���}��(d��ng)������(hu��)ʹ����?f��)�Y(ji��)��(g��u)��(f��)�s�����ٕr(sh��)��ͨ�^(gu��)���ƷǓQ��������Ĵ�С��(l��i)�{(di��o)��(ji��)�Q���D(zhu��n)���}��(d��ng)[4]���īI(xi��n)[5]�Hᘌ�(du��)PwM ON��ʽ��(du��)�D(zhu��n)���}��(d��ng)��Ӱ��M(j��n)�з������īI(xi��n)[6��8]��(du��)늙C(j��)��ͬ�ٶȅ^(q��)���ò�ͬ�ēQ���D(zhu��n)���}��(d��ng)���Ʒ�������δ���]PwM��(du��)ϵ�y(t��ng)��Ӱ푡��īI(xi��n)[9һ12]�����A(y��)�y(c��)������ơ���(j��ng)�W(w��ng)�j(lu��)���ơ��Կ��_���Ƶȁ�(l��i)�����D(zhu��n)���}��(d��ng)�������㷨��(f��)�s�������ڌ�(sh��)�F(xi��n)��
ᘌ�(du��)BLDCM�ēQ���^(gu��)�̣��Լ�PwM��(du��)����ϵ�y(t��ng)��Ӱ푣������ڱ���PwMһ0N��PwM��(y��u)�����ܵĻ��A(ch��)�ϣ���늙C(j��)���١����ٕr(sh��)��ͨ�^(gu��)��(du��)�Q�����gPwM�{(di��o)�Ʊȵ���ȡ��������ڲ�ͬ�ٶȕr(sh��)�ēQ���D(zhu��n)���}��(d��ng)�a(b��)�����ƣ���ԭ����?f��)�Y(ji��)��(g��u)��׃�Ļ��A(ch��)�ϣ���������ϵ�y(t��ng)�Ŀ������ܣ�����ڌ�(sh��)�F(xi��n)��
1�Q���^(gu��)�̷���
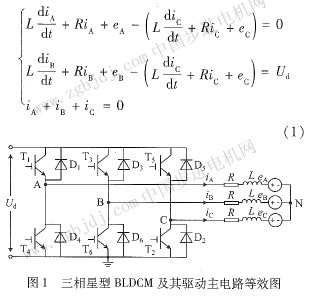
�O(sh��)BLDcM������(du��)�Q(ch��ng)�������B�ӣ�����늘з���(y��ng)����Ӌ(j��)�u���ʹŜ��p�ģ��t���Ч�·�����(q��)��(d��ng)���·��D1��ʾ���D�У�R��L�քe�����@�M����늸У�eA��eB��eC�քe�������@�M�ϵķ�늄�(d��ng)��(sh��)����(d��ng)늙C(j��)��������������B(t��i)120����(d��o)ͨ��ʽ�r(sh��)������늘��@�M늸е�Ӱ푣�����Q���˲�r(sh��)��ɵģ������_(k��i)����T1��T2��(d��o)ͨ׃?y��u)�T(m��n)2��T3��(d��o)ͨ�����·��B(t��i)��A��c�����@�M��(d��o)ͨ�ГQ��B��c�����@�M��(d��o)ͨ������(l��i)�����Q���^(gu��)�̡��ړQ���^(gu��)���У�A�������D4�m(x��)������u�pС��0��B�������u�����_(d��)����(w��n)�B(t��i)ֵ���Q���^(gu��)�̵��·���̞�
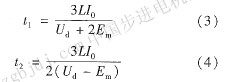
���]늙C(j��)�����@�M�ķ�늄�(d��ng)��(sh��)��ƽ플��ȡ�120��늽Ƕȵ����β�����ֵ��Em,�t�Q���^(gu��)���У�eA=eB=һeC=Em���cBLDcM���@�M�r(sh��)�g����(sh��)L��R��ȣ������J(r��n)��PwM���������С���t��|Rix|=|LdiX��dit|��X=A��B��c���ɺ���늘��@�M����Ӱ�[6]�������]��������ij�ֵ�ͽKֵ��Q��ǰ�������ķ�(w��n)�B(t��i)ֵI0����ʽ(1)�ɵÓQ�����g�ĸ��������
��ʽ(2)�ɵã��Q�����gA���@�M���P(gu��n)���r(sh��)�gt1��B���@�M���_(k��i)ͨ�r(sh��)�gt2�քe��
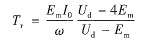
�O(sh��)�D(zhu��n)�әC(j��)е���ٶȞ�أ��t�Q�����g��늴��D(zhu��n)�؞�
��ʽ(2)��(5)��֪��
��(d��ng)Ud>4Em�r(sh��)����늙C(j��)�D(zhu��n)��С��һ��ֵ�r(sh��)����������Q���ͬ�r(sh��)��ɣ���iA����0֮ǰ��iB���_(d��)����(w��n)�B(t��i)ֵ����D2�ГQ������I���ғQ�������D(zhu��n)�����ӣ��D(zhu��n)���}��(d��ng)��
��(d��ng)Ud=4Em�r(sh��)����늙C(j��)��һ���D(zhu��n)�����\(y��n)�Еr(sh��)�������@�M�ēQ�����ͬ�r(sh��)��ɣ���iA����O��ͬ�r(sh��)iB�_(d��)����(w��n)�B(t��i)ֵ����D2�ГQ�������ғQ���^(gu��)�����D(zhu��n)�ر��ֺ㶨����ֵ���ڷǓQ���چ�(w��n)��늴��D(zhu��n)�أ� ��(d��ng)Ud<4Em�r(sh��)����늙C(j��)�D(zhu��n)�ٴ���һ��ֵ�r(sh��)����������Q���ͬ�r(sh��)��ɣ���iA�ѽ���0�r(sh��)��iB߀�](m��i)���_(d��)����(w��n)�B(t��i)ֵ����D2�ГQ������ |