���ڿ������^�y(c��)��������ͬ��늙C(j��)�Կ��_����
����P�� �����S�� ����
(�Ͼ����պ����W(xu��)�����Դ���c(di��n)��(sh��)�(y��n)�ң����K�Ͼ�210016)
ժҪ������(j��)�������V����Փ�����^�y(c��)������(du��)����ͬ���ŷ�ϵ�y(t��ng)��ؓ(f��)�d�D(zhu��n)���M(j��n)�Ќ�(sh��)�r(sh��)�^�y(c��)��������ؓ(f��)�d�D(zhu��n)�ص��^�y(c��)ֵ��ϵ�y(t��ng)���γ��D(zhu��n)��ǰ���a(b��)�����O��������ϵ�y(t��ng)�Ą�(d��ng)�B(t��i)���ܺͿ��ɔ_������ԇ�(y��n)�C����ԓ������(ji��n)����Ч�������@�����ϵ�y(t��ng)�Ŀ��ɔ_�����������ԡ�
�P(gu��n)�I�~���������^�y(c��)��������ͬ��늙C(j��)���Կ��_����
�ЈD���̖(h��o)��TM 301 2��TM 35t�īI(xi��n)��(bi��o)־�a��A���¾�̖(h��o)��1673��6540(2010)05-027-05
0 �� ��
����ͬ��늙C(j��)(PMSM)�����w�eС���Y(ji��)��(g��u)��(ji��n)�Ρ��߹����ܶȡ���Ч�ʡ����D(zhu��n)�ؑT�Աȵȃ�(y��u)�c(di��n)���ڬF(xi��n)�������ŷ�ϵ�y(t��ng)�еõ��ˏV����(y��ng)�á����Ǹ����ܵ��ŷ��{(di��o)��ϵ�y(t��ng)�\(y��n)����r��(f��)�s����(j��ng)��Ŀ��Ʒ����y�ԑ�(y��ng)���r(sh��)׃��ؓ(f��)�d�_��(d��ng)���Ķ���(d��o)��ϵ�y(t��ng)�Ą�(d��ng)�B(t��i)���ܺͿ��_����׃������ϵ�y(t��ng)�Ŀ��_���ܷ��棬Ŀǰ����(n��i)������Ҫ���Ì�(du��)ؓ(f��)�d�_��(d��ng)��(sh��)�r(sh��)�^�y(c��)���γ�ǰ���a(b��)��?sh��)ķ��������īI(xi��n)[1-2] ��������Կ��_���������īI(xi��n)[3]����˻��ڔ_��(d��ng)�^�y(c��)���ĵ��ٿ��Ʒ������īI(xi��n)[4]����˻���ؓ(f��)�d�D(zhu��n)���^�y(c��)�Ŀ��_���Ʒ������@Щ�����M��ȡ���˺ܺõ�Ч��������Ҫ������ؓ(f��)�d�_��(d��ng)�^�y(c��)�����L(zh��ng)��ϵ�y(t��ng)��(sh��)�r(sh��)�Բ������⣬����PMSM�D(zhu��n)�Ӟ������w�Y(ji��)��(g��u)�������~���(l��)�ţ����p�d���߿��d�£�����y(c��)�����ɔ_Ӱ��^���e���ڵ�����r�£���(y��n)��Ӱ���ؓ(f��)�d�_��(d��ng)�Č�(sh��)�r(sh��)�^�y(c��)��
���ĽY(ji��)�Ͽ������V���㷨���ŷ�ϵ�y(t��ng)ģ���O(sh��)Ӌ(j��)��һ�N�������^�y(c��)������(sh��)�r(sh��)��(zh��n)�_�،�(du��)ϵ�y(t��ng)��ؓ(f��)�d�D(zhu��n)���M(j��n)���^�y(c��)�������^�y(c��)ֵ��(du��)ؓ(f��)�d�_��(d��ng)�γ�ǰ��У���h(hu��n)��(ji��)����(du��)ؓ(f��)�d�D(zhu��n)�صĔ_��(d��ng)�����a(b��)����ԇ�(y��n)������ԓ�����܉���Ч���PMSM�����{(di��o)��ϵ�y(t��ng)�Ą�(d��ng)�B(t��i)���ܺͿ��_���ܡ�
1 �xɢ�������V��ԭ��
�������V���㷨[5-6]��һ�N****��Ӌ(j��)�㷨�����㷨�O���������ģ���`��͜y(c��)�������܉���Ч������ϵ�y(t��ng)�`��͜y(c��)���`�(du��)��B(t��i)��Ӌ(j��)��Ӱ푣���ߠ�B(t��i)��Ӌ(j��)�ľ��ȡ�
�O(sh��)�xɢ����ϵ�y(t��ng)��m�Sϵ�y(t��ng)���̺�n�S�y(c��)�����̷քe��ʽ(1)��(2)��ʾ��
ʽ�У���(d��ng)�B(t��i)��{wk}�c�y(c��)����{vk}�ǻ������P(gu��n)�����ֵ�������У�����(du��)���е�k��jģ�ͻ����y(t��ng)Ӌ(j��)���|(zh��)��
��(du��)ϵ�y(t��ng)��B(t��i)��Ӌ(j��)��ʽ(3)��(4)��ʾ��ʽ�С�^����ʾ��B(t��i)׃����Ӌ(j��)ֵ����k����ʾk�r(sh��)�̠�B(t��i)׃���Ĺ�Ӌ(j��)ֵ����k+1��k����ʾk�r(sh��)���A(y��)�y(c��)k+1�r(sh��)�̵Ġ�B(t��i)׃��ֵ��
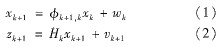
ʽ�У���xk+1�����Ք����y(c��)��ֵ֮��P��(sh��)�Hֵ�ĞV����Ӌ(j��)�`�
��xk+1,k�����Ք����y(c��)��ֵ֮ǰ��(du��)��(sh��)�Hֵ���A(y��)�y(c��)��Ӌ(j��)�`�
�քe��(du��)��xk+1����xk+1,kȡ����ɵÞV��������������(g��)�V����ʽ���V����Ӌ(j��)�`����(Pk+1)���V������(kk+1)��һ���A(y��)�y(c��)��֭�`����(Pk+1,k)�����У�Kk+1ȡ�V������ֵ�r(sh��)��Pk+1��С���Ķ���(sh��)�F(xi��n)ϵ�y(t��ng)�ľ���****�V����
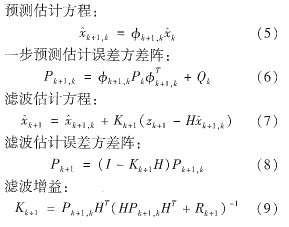
������ԭ����D��D1��ʾ���xɢ�������V�������f�ƹ�ʽ���¡�
2 �������Կ��_�^�y(c��)���O(sh��)Ӌ(j��)
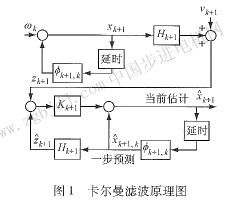
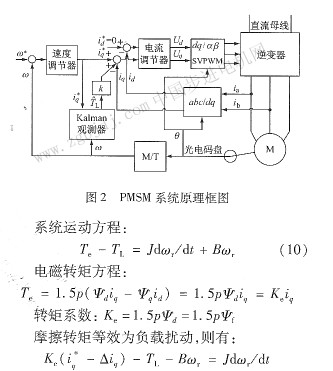
PMSM�{(di��o)��ϵ�y(t��ng)ԭ����D2��ʾ��ϵ�y(t��ng)���ÿ��g�m���}���{(di��o)�ƣ�SVPWM�����g(sh��)�����������a�S���������Ŀ��Ʒ�����
ʽ�У�iq����q�S����o��ֵ��
��iq����q�S�o������c�������֮�
ʽ�У�Te����늴Žo���D(zhu��n)�أ�Te=Keiq��
T1������Чؓ(f��)�d�D(zhu��n)�أ�T1=TL+B��r+Ke��iq��
�{(di��o)��ϵ�y(t��ng)�����p |