һ�N����ʽ늙C(j��)�Y(ji��)��(g��u)�O(sh��)Ӌ(j��)�c�D(zhu��n)�ط���
�����A����·�g
(�S���W(xu��)Ժ늚���Ϣ���̌W(xu��)Ժ���S��461000)
ժҪ��ᘌ�(du��)�C(j��)���˵Ȍ�(du��)�(q��)��(d��ng)�O(sh��)���п��g���Ƶđ�(y��ng)�È�(ch��ng)�ϣ������һ�N�����X݆����ʽ늄�(d��ng)�C(j��)�Y(ji��)��(g��u)��������늙C(j��)���\(y��n)��ԭ���ʹň�(ch��ng)���ԣ��o���˿��Ʒ�ʽ���ƌ�(d��o)���D(zhu��n)��Ӌ(j��)�㷽��������߷������_�ԣ�����ansoft maxwell����Ԫ�ň�(ch��ng)����ܛ��Ӌ(j��)�㣬늙C(j��)�D(zhu��n)���ڲ�ͬ�����^(q��)����o�B(t��i)�D(zhu��n)�ء�Ӌ(j��)��Y(ji��)������ԓ늙C(j��)���е��D(zhu��n)�١���Ť�����c(di��n)��ԓ늙C(j��)�����˜p�ٙC(j��)��(g��u)���s���˂���(d��ng)朣��Y(ji��)��(g��u)�o���������^�õđ�(y��ng)��ǰ����
�P(gu��n)�I�~������ʽ늄�(d��ng)�C(j��)���p�ٙC(j��)��(g��u)���o�B(t��i)�D(zhu��n)�أ�����Ԫ
�ЈD���̖(h��o)��tm359. 9 �īI(xi��n)��(bi��o)־�aia ���¾�̖(h��o)��1001-6848(2010)06-0009-04
o�� ��
�����(l��i)���S���C(j��)���ˡ������O(sh��)���С�͙C(j��)е�b�õďV����(y��ng)�ã���(du��)�(q��)��(d��ng)늙C(j��)���m(x��)�������Ϳ��g�m��(y��ng)������˸���Ҫ��(gu��)��(n��i)���о����Ⱥ�����Ͱl(f��)չ�˶�N���͵Ŀ�ֱ���(q��)��(d��ng)�R�_(d��)�����У�ֱ���(q��)��(d��ng)��늙C(j��)����(d��ng)���ȸߣ������ڛ](m��i)�����g����(d��ng)�b�ã������ؓ(f��)�d׃��Ӱ��^��ʹ���������(q��)��(d��ng)���O(sh��)Ӌ(j��)�����(f��)�s�����C���p����늙C(j��)���ڲ�����݆���������דp�ģ�����늙C(j��)�t���ö��D(zhu��n)���gĦ�������f��������˓p���^���ҹ����ܶ��^�ͣ��Ŝ���s�R�_(d��)�t�������þ��x�^С��Ŀǰ߀ֻ���m�����͙C(j��)���ˡ�
���������һ�N�X݆����ʽ늙C(j��)�Y(ji��)��(g��u)�����p�����c늙C(j��)���ɞ�һ�w��ԓ늙C(j��)�Ĵň�(ch��ng)�����c����늙C(j��)��һ���������ԣ��D(zhu��n)�ӺͶ��Ӷ����õ���ܛ�Ų��ϣ��ň�(ch��ng)�(q��)��(d��ng)�ķ�ʽ���c늴��F��Щ���ƣ���Ҫ�������˴��F�����������(q��)��(d��ng)ݠ���\(y��n)��(d��ng)���O(sh��)Ӌ(j��)��늙C(j��)�Č�(sh��)�w�Y(ji��)��(g��u)ģ�ͣ��o���˿��Ʒ�����������늙C(j��)���\(y��n)��ԭ�����D(zhu��n)�أ��\(y��n)������Ԫܛ��ansoft maxwellӋ(j��)����늙C(j��)�D(zhu��n)���ڲ�ͬ�D(zhu��n)��̎���o�B(t��i)�D(zhu��n)�غʹň�(ch��ng)���ԡ�
1�X݆����늙C(j��)�\(y��n)��ԭ���c�Y(ji��)��(g��u)
1.1�\(y��n)��ԭ��
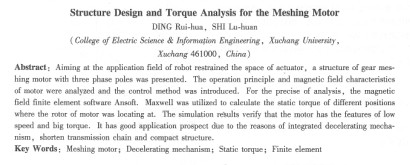
�D1�釧��ʽ늙C(j��)�ĽY(ji��)��(g��u)�͇���ԭ��D���Dl(a)�е����X݆�c�Dl(b)�е��D(zhu��n)��ͬ�S�����S�Ğ�02�c(di��n)�������c��(n��i)�XȦͬ�S�ҹ��B��һ�����S�Ğ�o1�c(di��n)�����X݆�c��(n��i)�XȦ���X�ξ����Ô[��݆��������d���ɫ@���^�ߵĂ���(d��ng)�ȣ�����(d��ng)ƽ��(w��n)������Ч���^�ߣ��V����(y��ng)���ڃ�(n��i)���ς���(d��ng)�Y(ji��)��(g��u)�С��D1(a)�е��X݆���Ϡ�B(t��i)�c�Dl(b)�е��D(zhu��n)��λ������(du��)��(y��ng)��늙C(j��)�Ķ��Ӿ���3��(g��)���(d��)���ĴŘO���Π���D2��ʾ���D(zhu��n)�Ӟ�A�h(hu��n)�δŘO�����D(zhu��n)�Ӿ��錧(d��o)�Ų�
�Ϙ�(g��u)�ɣ�ÿ��(g��)���ӴŘO�Ϸքe�@����1���@�M���Ϊ�(d��)�Գ�һ�ࡣ
��(d��ng)3��(g��)�ŘOa��b��c��һ�����e�t���r(sh��)���D(zhu��n)�ӌ���o1o2��돽���A�ܹ��D(zhu��n)�\(y��n)��(d��ng)���ڝM���D(zhu��n)�ӹ��D(zhu��n)�돽���ڔ[���XȦ�͔[�����X݆�Ļ��A�돽֮��l���£��D(zhu��n)�ӾͿ���ֱ�ӎ���(d��ng)���X݆���@��������o1�����D(zhu��n)�\(y��n)��(d��ng)������(j��)�[������ԭ���������X݆��ͬ�@��(n��i)�XȦ�S�ĵĸ��وA�ܹ��D(zhu��n)�\(y��n)��(d��ng)�D(zhu��n)����[�����X݆�ĵ��ٶ��S�D(zhu��n)��(d��ng)��
����(j��)�[���p��������(d��ng)ԭ������Ӌ(j��)��ԓ�C(j��)��(g��u)�Ă���(d��ng)�ȣ�
ʽ�У�zi���XȦ�X��(sh��)��z0�����X݆�X��(sh��)��
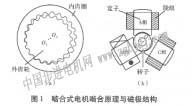
�D2�еĶ��ӴŘO�ϰ��b�Ѓɂ�(g��)�@�M����(li��n)��һ������(g��)���ӴŘO�g�](m��i)�дň�(ch��ng)��ϣ������˴ň�(ch��ng)�����y�ȡ�
1.2�X݆����늙C(j��)�Y(ji��)��(g��u)�O(sh��)Ӌ(j��)
�D3�鱾�о��O(sh��)Ӌ(j��)���X݆����ʽ늙C(j��)��(sh��)�wģ�͡�����늙C(j��)���D(zhu��n)���\(y��n)��(d��ng)�^(gu��)����һ�Nƫ�ĵĹ��D(zhu��n)�\(y��n)��(d��ng)����(hu��)ʹ늙C(j��)�a(ch��n)���^������(d��ng)�������늙C(j��)�\(y��n)�еķ�(w��n)���ԣ����о����Ã��״ŘO�C(j��)��(g��u)���ŘO��λ���l80�ȣ����״ŘO���D(zhu��n)�ӺͶ��ӷքe�c�����X݆���XȦ���ϙC(j��)��(g��u)�B�ӣ��@�N�Y(ji��)��(g��u)������������D(zhu��n)�ӵ�ƫ���\(y��n)��(d��ng)��ɵ����(d��ng)��(w��n)�}��
ԓ늙C(j��)�е��ֻ��K�C(j��)��(g��u)���Ԍ����X݆�����D(zhu��n)�\(y��n)��(d��ng)ݔ�����^(gu��)�V���X݆�Ĺ��D(zhu��n)�\(y��n)��(d��ng)��
2�D(zhu��n)��Ӌ(j��)�����
���ڴň�(ch��ng)�Y(ji��)��(g��u)��ֲ�ʽ�ŘO���ŘO�g�](m��i)�дœP(y��ng)��ϣ��H������늉��Ĵ�С���ƴň�(ch��ng)��������Ҫ���]늉������D(zhu��n)���ܵ��Ĵň�(ch��ng)�������c���ӿ��gλ�� |