�_(k��i)�P(gu��n)����늙C(j��)���m��(y��ng)��������
�~��1���ܱ���2
��1���L(zh��ng)����W(xu��)��·ʩ�����g(sh��)�c�b����������c(di��n)��(sh��)�(y��n)�ң�����7100642������ͨ��W(xu��)�C(j��)е���̌W(xu��)Ժ������710049��
ժҪ��ᘌ�(du��)�_(k��i)�P(gu��n)����늙C(j��)�\(y��n)�о��Џ�(qi��ng)�Ǿ��Ե����c(di��n)����ģ�����m��(y��ng)���ƺ�h������������Y(ji��)�ϣ��O(sh��)Ӌ(j��)��ϵ�y(t��ng)ģ�����m��(y��ng)h��������������늙C(j��)�ķֶξ��Ի�ģ��ģ�ͣ��������˿���ϵ�y(t��ng)�ķ�(w��n)���ԣ�����dsp��Q�����m��(y��ng)�������Ƶ�Ӳ���B�m(x��)��(sh��)�F(xi��n)��(w��n)�}������͌�(sh��)�(y��n)�Y(ji��)������������ģ�����m��(y��ng)h��������ڂ��y(t��ng)��pi���Ʒ������^(gu��)�ɕr(sh��)�g�����{(di��o)���ͷ�(w��n)�B(t��i)�`��ȷ�����Ѓ�(y��u)Խ�ԣ�߀�ɱ��Cϵ�y(t��ng)������(w��n)���ԡ�
�P(gu��n)�I�~���_(k��i)�P(gu��n)����늙C(j��)��ģ�����ƣ����m��(y��ng)���ƣ���������
�ЈD���̖(h��o)��tm352 �īI(xi��n)��(bi��o)־�a��a ���¾�̖(h��o)��l001-6848(2010)06-0048-06
0�� ��
�_(k��i)�P(gu��n)����늙C(j��)����(ji��n)�Qsrm���(q��)��(d��ng)ϵ�y(t��ng)��(w��n)����20���o(j��)80���������Ҫ���c(di��n)��늙C(j��)�Y(ji��)��(g��u)�o���ι̣��m���ڸ����\(y��n)�С��(q��)��(d��ng)�·��(ji��n)�Ρ��ɱ��͡����ܿɿ����ڌ��V���D(zhu��n)�ٷ�����(n��i)Ч�ʶ����^�ߣ����ҿ��Է���،�(sh��)�F(xi��n)�������ơ��@Щ���c(di��n)ʹsrm���m��늄�(d��ng)܇�v�ĸ��N���r�\(y��n)�У�����****Ч�����_(d��)�ٷ�֮90�����J(r��n)��������늄�(d��ng)܇�v�����аl(f��)չǰ����늙C(j��)�(q��)��(d��ng)ϵ�y(t��ng)��srm�Ĺ���ԭ���ͽY(ji��)��(g��u)�����^��(ji��n)�Σ����������p�O�ĽY(ji��)��(g��u)���c(di��n)����·���·�ķǾ��ԡ��_(k��i)�P(gu��n)�ԣ�ʹ��늙C(j��)�ĸ���(g��)�������S�D(zhu��n)��λ���������Բ�����׃���������@�M����ʹ�ͨ���β�Ҏ(gu��)�t����srm�\(y��n)���^(gu��)���б��F(xi��n)����(qi��ng)�Ǿ��Ե����c(di��n)��Ŀǰ���N�Ǿ��Է����ѱ���(y��ng)�õ�srm�У���Ч��������ʮ�����롣���m��(y��ng)�������������Qϵ�y(t��ng)��(qi��ng)�Ǿ��Ե�һ�N�ֶ����ЏV��W(xu��)���M(j��n)���˳����о�������Ч��Ҳ�õ��˳����(y��n)�C�����Č�ģ�����m��(y��ng)�����c����������Y(ji��)�ϣ������һ�N�����B�m(x��)�O(ji��n)�����ƹ��ܵ����m��(y��ng)�������������˷��˃ɷN�������Եľ����ԣ��Ȍ�(sh��)�F(xi��n)�ˌ�(du��)srm��朷Ǿ��ԵĄ�(d��ng)�B(t��i)�a(b��)�����ֿ��������ⲿ�_��(d��ng)�Լ�δ��ģ��(d��ng)�B(t��i)��Ӱ푣��Ķ��ɱ��Cϵ�y(t��ng)�ĕ��B(t��i)���ܡ���(w��n)�B(t��i)���ܼ��������ܡ�
1 srm�\(y��n)������
(1) srm����ģʽ
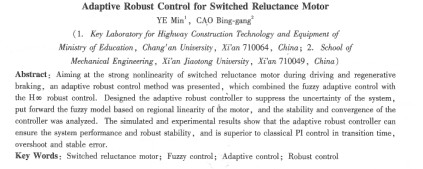
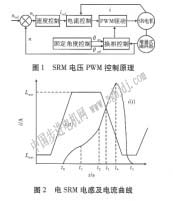
srm�(q��)��(d��ng)�������Ƅ�(d��ng)���ù̶��Ƕ�늉�pwm����ģʽ������ԭ����D1��ʾ���o���ٶ��c�����ٶȵ�ƫ�(j��ng)�ٶȿ����������������ݔ���������ٶȺ���������ӳ���Ӌ(j��)���늉��Ŀ���������pwm�·��ռ�ձȽo��ֵ������һ���l�ʵ�ݔ�������}�_���ȣ����{(di��o)�Ƶķ����}�_��̖(h��o)�ӵ������������O�(q��)��(d��ng)�·���������_(k��i)�P(gu��n)�Č�(d��o)ͨ�c�P(gu��n)�࣬�㌢ʩ�ӵ�srm늙C(j��)�@�M�ϵ�ֱ��늉��ز��Ɍ�(du��)��(y��ng)�l�ʺ�ռ�ձȵķ���늉����Ķ���׃�@�M�ɶ�늉�����Чֵ����(sh��)�F(xi��n)srm���(q��)��(d��ng)�������Ƅ�(d��ng)��srm�\(y��n)�І�(g��)���ڵ�늸м����������D2��ʾ���A�����_(k��i)�P(gu��n)��(d��o)ͨ��늙C(j��)������ܣ��ل�(l��)�Ž����A�Ρ�to ��0�A�ήa(ch��n)��늄�(d��ng)�D(zhu��n)�أ���������^С��늄�(d��ng)�D(zhu��n)�ز������@һ�A�ο�����ߌ�(du��)��(y��ng)t3�r(sh��)�̵��������(du��)�ڽ�����(l��)������s���ஔ(d��ng)
����ġ��A�����_(k��i)�P(gu��n)�����P(gu��n)�࣬������ܣ��ٰl(f��)��A�Ρ�ͨ�^(gu��)�{(di��o)����(l��)���A���c�l(f��)��A����ռ����(g��)���ڵı�ֵ�Ɍ�(sh��)�F(xi��n)srm���(q��)��(d��ng)�������Ƅ�(d��ng)����(d��ng)��(l��)���A����ռ��ֵ�^��r(sh��)��srm̎���(q��)��(d��ng)����֮�l(f��)��A����ռ��ֵ�^��r(sh��)��srm̎�������Ƅ�(d��ng)�A�Ρ����������Ҏ(gu��)�t׃��������Ҋ(ji��n)������(g��)�\(y��n)���^(gu��)�̾��Џ�(qi��ng)�ҵķǾ������ԡ�
(2) srm�Ǿ�������
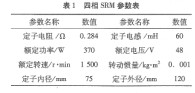
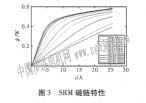
�����о���srm늙C(j��)����(sh��)���1��ʾ��������@�M�Ĵ���S�D(zhu��n)�ӽ�λ�ƺ����@�M���׃������Ҋ(ji��n)�D3�����ڴ�����Լ����������p�O�Y(ji��)��(g��u)��ʹ����Џ�(qi��ng)�еķǾ������c(di��n)��
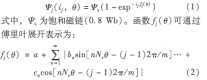
�ɈD3�M(j��n)�Ѕ���(sh��)�M�ϣ��ɵ�srm����c������D(zhu��n)��λ�ýǶȵ��P(gu��n)ϵ�飺
����ʽ��2)�и��A����(sh��)�(xi��ng)���tsrm�@�M늸пɱ�ʾ��
|