����늙C(j��)�����νӷ��r(sh��)���g ʸ���}���{(di��o)�Ƽ��g(sh��)����
�S�B��1��������1�������1�����첨2
(1 ̫ԭ������W(xu��)��ɽ��̫ԭ030024��2ꖳLJ��H�l(f��)�؟(z��)������˾��ɽ���x��048102)
ժҪ�������ˮ���늙C(j��)�����νӷ����ÿ��gʸ���}���{(di��o)��(SVPWM)���g(sh��)�r(sh��)������늉��Ն�ʸ���Ĵ�С�c��λ�������Y(ji��)��������늙C(j��)��Y���c���ӕr(sh��)����׃�����f���_�P(gu��n)��B(t��i)��ͮ�ɵ�늉����gʸ���Ĵ�С����λ������ͬ���ڴ˻��A(ch��)�Ͻo���ˡ��ӷ��r(sh��)�ȅ^(q��)�Ą��ּ��ȅ^(q��)̖(h��o)�Ĵ_��������
�P(gu��n)�I�~���}���{(di��o)�ƣ��_�P(gu��n)��B(t��i)������늙C(j��)
�ЈD���̖(h��o)��TM 343�īI(xi��n)��(bi��o)־�a��A���¾�̖(h��o)��1673��6540(2010)064)031��04
0 �� ��
�ڸ�����ȫ��(sh��)�ֿ��ƵĽ����ŷ��(q��)��(d��ng)ϵ�y(t��ng)�У�ͨ�����Ô�(sh��)���}���{(di��o)��(Pulse Width Modula��tion��P~XeM)����������?zh��n)��y(t��ng)��ģ�MPWM����������F(xi��n)�Ŀ��gʸ���}���{(di��o)��(Space Vector PulseWidth Modulation��SVPWM)���g(sh��)�c���y(t��ng)�������}���{(di��o)��(Sin��Wave Pulse width Modulation��sPwM)���g(sh��)��ȣ���ֱ��늉������ʵȷ��棬����������@�ă�(y��u)�ݣ������늙C(j��)�����ϵõ��ˏV����(y��ng)�á����磬�殐��늙C(j��)ʸ������ϵ�y(t��ng)�У�����(j��)��ҪӋ(j��)�������늉��Ħ����·���������SVPWM���g(sh��)�_����Ҫʩ�ӵĻ���늉����gʸ�����Ķ��_����׃�����_�P(gu��n)��B(t��i)�����ǣ�SVPWM���g(sh��)�nj�(du��)늙C(j��)�Ŀ�Ŀ늉��M(j��n)���{(di��o)�Ƶġ������������ڮ���늙C(j��)����Y�͡��ӷ��ɷN��r�£���׃����ͬ���_�P(gu��n)��B(t��i)�ϳɵĻ���늉����gʸ���Ĵ�С����λ������ͬ���������(du��)늙C(j��)���@�M�ӷ��M(j��n)���Д��������ͬ���{(di��o)�Ʒ���������(hu��)��(d��o)���e(cu��)�`�Ŀ��ƽY(ji��)�����īI(xi��n)[1-5]�o�����{(di��o)���㷨������늙C(j��)Y�ӷ������ķ����ˡ��ӷ���r�£���׃����ͬ�_�P(gu��n)��B(t��i)��(du��)��(y��ng)�����gʸ���ķ�ֵ����λ���Լ��ȅ^(q��)�Ą��ַ��������cY�ӷ�����r�M(j��n)���ˌ�(du��)�ȡ�
1 늙C(j��)Y���c���ӵĿ��gʸ���ϳ�
1��1��׃�����_�P(gu��n)��B(t��i)
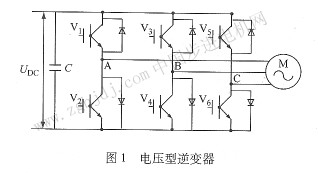
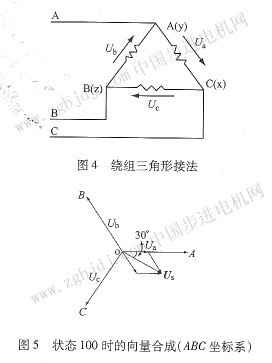
�D1�ǵ��͵�����늉��͘�ʽ��׃�·���D��V1��V6��6��(g��)ȫ�����_�P(gu��n)������ͬһ��۵��_�P(gu��n)�������෴���_�P(gu��n)��B(t��i)���O(sh��)�Ϙ�ی�(d��o)ͨ��l����ی�(d��o)ͨ��0���t��׃���Ĺ�����B(t��i)����8�N���քe��000��100��110��010����1��001��101��11�����У�000�c111ʹ��׃��ݔ��늉����㣬�Q����ʸ��������6�N��(du��)��(y��ng)6��(g��)������늉����gʸ�������@�M����Y�����ӷ��ɷN��r�£������Ĵ�С����λ��ͬ���������¡�
1��2늙C(j��)�@�MY�ӷ����늉����gʸ�����ȅ^(q��)����
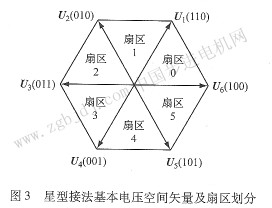
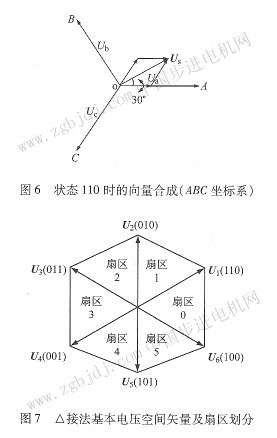
���x����늉�ʸ���ڸ����@�M���S������D2��ʾ��6��(g��)����늉����gʸ���ķ�ֵ����λ���1��ʾ����λ�ֲ����ȅ^(q��)������D3��ʾ��
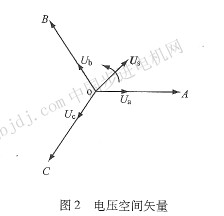
��1�У�Ua��Ub��Uc�քe��A��B��C�����@�M 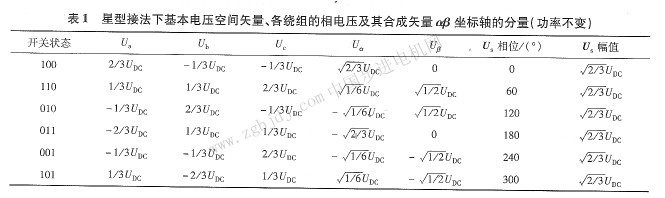 1��3늙C(j��)�@�M���r(sh��)��늉����gʸ���ϳɼ��ȅ^(q��)����
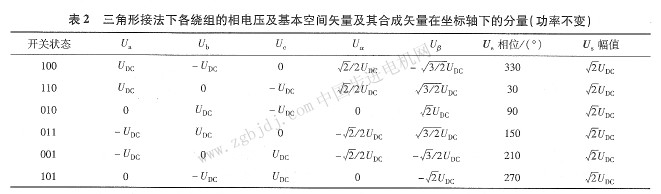
�D4���@�M���ӷ��r(sh��)�ĽӾ�ʾ��D����̖(h��o)��(n��i)��ĸ��ʾ�@�Mβ�ˡ��D5��ʾ�_�P(gu��n)��B(t��i)��100�r(sh��)���gʸ���ĺϳ���r����(du��)��(y��ng)�D1��V1��V4��V6��(d��o)ͨ��V2��V3��V5�P(gu��n)�࣬����늉�Ua��Uc��Ub����(du��)��ֱ��ĸ����ؓ(f��)�O�քe��Udc-Udc��0����ǰ�����x��ȡ����늉��Ն�ʸ���������@�M���S���ϣ��t�ϳ�ʸ��Us=3Udce.
����늉�(_4Bc����(bi��o)ϵ�Ĕ�(sh��)ֵ)��Ua��Ub�Ǹ��_�P(gu��n)��B(t��i)��(du��)��(y��ng)�Ļ���늉�ʸ���ֽۡ����(bi��o)ϵ�ϵķ�����Us��ϳɵĻ���늉����gʸ���Ĵ�С��Us��λ��ʾ����늉����gʸ������λ��
�D6��ʾ�����_�P(gu��n)��B(t��i)��1 10�r(sh��)���gʸ���Ĵ�С�c��λ������ͬ�ӵķ����ɵ��������gʸ���Ĵ�С����λ(Ҋ��2�͈D7)����(du��)�ȈD3��7����1��2��Ҋ���ɷN�ӷ��r(sh��)6��(g��)����늉��Ն�ʸ������λ��ͬ�����ӷ���Y�ӷ��r(sh��)�ϳɵĿՆ�ʸ����λ����n��6(��r(sh��)ᘞ�������)����ǰ�߷�ֵ��
2 ���ӷ��ȅ^(q��)���ּ��ȅ^(q��)̖(h��o)�_��
|