�����x(ch��ng)�w���������ˑB(t��i)�ŷ����������O(sh��)Ӌ(j��)
��҈���܊���K�еأ��O��
���Ї�(gu��)Ӌ(j��)���W(xu��)ԺӋ(j��)���y(c��)ԇ���̌W(xu��)Ժ������310018��
ժҪ�����L(f��ng)����(sh��)�(y��n)�У����(d��ng)�B(t��i)���о������x(ch��ng)�w�����������ˑB(t��i)���Ʒ������w�����������ˑB(t��i)��Ҫ����(j��)���b�����ϵ��Ͷ�S����������ݔ��Ť���M(j��n)�Ќ�(sh��)�r(sh��)�{(di��o)��(ji��)������O(sh��)Ӌ(j��)�˱��ŷ�������������������stc����(qi��ng)��51��Ƭ�C(j��)���鱾�������ĺ��ģ���ģ�Mspi�ӿ��c��S���������M(j��n)�Д�(sh��)��(j��)�ɼ��������λ�������ˑB(t��i)�ǂ����������ģ��(sh��)�D(zhu��n)�Q�·��(du��)�ˑB(t��i)�Ƕ��M(j��n)�вɘӣ����ò��M(j��n)늙C(j��)��(sh��)�F(xi��n)��(du��)�����ˑB(t��i)�ǽ��ٶȵĄ�(d��ng)�B(t��i)�{(di��o)��(ji��)��������pid�㷨��(du��)�ˑB(t��i)�ǽ��ٶ��M(j��n)���]�h(hu��n)�������ƣ��Դ_�������ˑB(t��i)���ٶȵĿ��ƾ��ȡ�
�P(gu��n)�I�~�������x(ch��ng)��mav( micro-aerial-vehicle)�������ˑB(t��i)���L(f��ng)��
�ЈD���̖(h��o)��tm275��tm383.6 �īI(xi��n)��(bi��o)־�a��a ���¾�̖(h��o)��1001-6848(2010) 07-0001-03
o�� ��
�S���ߴ�ĿsС�����Ҏ(gu��)�w�������ښ��(d��ng)Ч�ʺ͙C(j��)��(d��ng)�������������y����Խ���ϵK��
����һ���棬��(j��ng)�^(gu��)�|�f(w��n)����M(j��n)�����w�����x(ch��ng)���кܺõĚ��(d��ng)Ч���Լ�******���w�ЙC(j��)��(d��ng)���ܡ�Ȼ���������w�����x(ch��ng)�ijߴ�dz�С����re��(sh��)һ��H��102 - 103��(sh��)����(j��)�����Գ�Ҏ(gu��)�w������֪�R(sh��)�ѽ�(j��ng)�����m�£�ͨ�^(gu��)���ĸ��l���(d��ng)�a(ch��n)�����(d��ng)���Ī�(d��)�ط�ʽ��Ҳ�o(w��)���ҵ�����(du��)��(y��ng)�ij�Ҏ(gu��)��Փ�Ɍ�(du��)���M(j��n)���^�õĽ�ጡ����䌦(du��)�w���ˑB(t��i)�Ŀ��Ʒ��������ǟo(w��)��֪�ԡ���(gu��)��(n��i)���S���W(xu��)���ѽ�(j��ng)��(du��)�w�����x(ch��ng)�ڸ���(g��)�����M(j��n)���˺ܶ��о��������W(xu��)��ellington������(gu��)���ݴ�W(xu��)berkeley��У��dudley��(du��)�w�����x(ch��ng)�M(j��n)���˴����Ļ��w���w��(sh��)�(y��n)��������S���P(gu��n)�����x(ch��ng)�w�еĿ��������������W(xu��)Ժ��dickinson�о�С�Mͨ�^(gu��)�C(j��)�������ó��˹�ω���w���д���β�E���@Ч��(y��ng)���������ČOï����cfd( computer fluid dvnamics)�ķ������l(f��)�F(xi��n)��ω���ij�ij��ڴ����@���@�ĸ����|(zh��)����Ч��(y��ng)��
���M(j��n)��ԭ�����о���ͬ�r(sh��)��Ҳ�в����о�С�M�M(j��n)���˷����x(ch��ng)�w�����Č�(sh��)�H�����о������ݴ�W(xu��)berkeley��Уsastnr�о�С�M���ڎ���ǰ���M(j��n)����mfi�n�}���о����O(sh��)Ӌ(j��)����ǻʽ�Ą�(d��ng)����[13-15]�������W(xu��)��wood�O(sh��)Ӌ(j��)�˲��É�늲����(q��)��(d��ng)���ęC(j��)���nω���ߴ�H�Ўׂ�(g��)���ף����Ԍ�(sh��)�F(xi��n)�ij����������Ǜ](m��i)���κο��ƹ��ܣ��ձ�chiba��W(xu��)liu�о�С�M���Լ���(gu��)��(n��i)�|�ϴ�W(xu��)�ƽ�о�С�M��Ҳ���M(j��n)�����P(gu��n)�����о���
���w�п��Ʒ��棬����(gu��)�����_��������W(xu��)��hedrick���о����B(ni��o)����x(ch��ng)��ƫ�����ƣ��l(f��)�F(xi��n)�������������˿՚�����Ч��(y��ng)��(l��i)��(sh��)�F(xi��n)ƫ����l19j���������⣬������δҊ(ji��n)�������x(ch��ng)�w�����ˑB(t��i)���Ʒ���Č�(sh��)�(y��n)�о���
��Փ���O(sh��)Ӌ(j��)�������ˑB(t��i)�ŷ����������Y(ji��)�϶�S�����������ˑB(t��i)�ŷ��C(j��)��(g��u)���ɷ�������L(f��ng)���Ќ�(du��)�����x(ch��ng)�w�����M(j��n)�������ˑB(t��i)���Ʒ����Č�(sh��)�(y��n)�о���
1ϵ�y(t��ng)Ҫ��
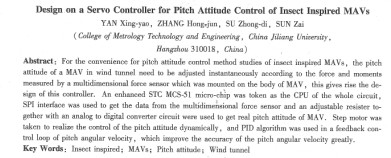
�L(f��ng)����(sh��)�(y��n)�_(t��i)ʾ��D��Dl��ʾ������(j��)�̶��ڷ����x(ch��ng)�w�����ϵ��Ͷ�S�����������y(c��)����������Ť�أ�Ӌ(j��)��������ˑB(t��i)�ǶȵĽǼ��ٶ�ֵ����ԓ�����ڿ��Ʋ��M(j��n)늙C(j��)���D(zhu��n)�٣��Ķ���(sh��)�F(xi��n)�����ˑB(t��i)�ǽ��ٶȵĄ�(d��ng)�B(t��i)���ơ�
ϵ�y(t��ng)�������ľ��wҪ�����£�
(1)ͨ�^(gu��)spi��serial peripheral interface���������O(sh��)�ӿڣ����������Ͷ�S���������Č�(sh��)�r(sh��)��(sh��)��(j��)��
(2)���Ԍ�(du��)�ˑB(t��i)���M(j��n)�и߾��Ȍ�(sh��)�r(sh��)�y(c��)����
(3)����(j��)��S��������ݔ������̖(h��o)��Ӌ(j��)����C(j��)�w�������ˑB(t��i)�Ǽ��ٶȺͽ��ٶȣ�
(4)����pid���������e�֣��֣��㷨��ͨ�^(gu��)���M(j��n)늙C(j��)��(du��)�C(j��)�w�������ˑB(t��i)��׃���ٶ��M(j��n)�з������_���ƣ�
(5)����ͨ�^(gu��)pc( personal computer)�C(j��)�O(sh��)��pid���ƅ���(sh��)��
(6)�Ɍ�(sh��)�r(sh��)����(d��ng)ǰ�����ˑB(t��i)�Ǻͽ��ٶȵ�Ӌ(j��)��ֵ����(sh��)�y(c��)ֵ���Լ�������Ť�ط�Ξ�ς���pc��
2��(sh��)�F(xi��n)����
2.1Ӳ��ϵ�y(t��ng)
���ˌ�(sh��)�F(xi��n)ϵ�y(t��ng)��Ҫ����stc����(qi��ng)��51��Ƭ�C(j��)stc12c5616���鱾�������ĺ��ģ�ԓϵ�І�Ƭ�C(j��)�\(y��n)���ٶ��ǂ��y(t��ng)5l��Ƭ�C(j��)��12�������ɔ_������(qi��ng)���� |