ȫ��(sh��)������ͬ��늙C(j��)�\(y��n)��(d��ng)����ϵ�y(t��ng)���O(sh��)Ӌ(j��)
�O�h(hu��n)ꖣ��S���{(di��o)����s��������
���Ͼ����I(y��)��W(xu��)�C(j��)е�c��(d��ng)�����̌W(xu��)Ժ���Ͼ�210009��
ժҪ���O(sh��)Ӌ(j��)��һ�N���ڔ�(sh��)����̖(h��o)̎����( tms320lf2407a)�����ܻ�����ģ�K(pm20csj060)��ȫ��(sh��)������ͬ��늙C(j��)�\(y��n)��(d��ng)����ϵ�y(t��ng)�����c(di��n)��B��ϵ�y(t��ng)��Ӳ���Y(ji��)��(g��u)��ܛ����(sh��)�F(xi��n)�����������(sh��)�(y��n)ƽ�_(t��i)����(sh��)�(y��n)����ԓϵ�y(t��ng)�������õĄ�(d��ng)�B(t��i)푑�(y��ng)���{(di��o)�����ԡ�
�P(gu��n)�I�~������ͬ��늙C(j��)���\(y��n)��(d��ng)���ƣ���(sh��)����̖(h��o)̎���������ܹ���ģ�K
�ЈD���̖(h��o)��tm341; tm351 �īI(xi��n)��(bi��o)־�a��a ���¾�̖(h��o)��1001-6848(2010)07-0050-03
0�� ��
�����������ͬ��늙C(j��)���书���ܶȸߡ�Ч�ʸߡ���(d��ng)�B(t��i)푑�(y��ng)�졢�{(di��o)�ٷ���������λ���_�ȃ�(y��u)�c(di��n)���ɞ��˸߾��ȡ��M(j��n)�o��****��(zh��)�ЙC(j��)��(g��u)֮һ���ڔ�(sh��)�ؙC(j��)�������I(y��)�C(j��)�����Լ��������_(d��)���\(y��n)��(d��ng)�����I(l��ng)��õ��ˏV���đ�(y��ng)�á����ڌ�(du��)ϵ�y(t��ng)�ĸ߾��ȡ��߷�(w��n)���Ժ߿��ɔ_�Ե�Ҫ��Խ��Խ�ߣ�����O(sh��)Ӌ(j��)��(sh��)�ֵ�����ͬ��늙C(j��)�\(y��n)��(d��ng)����ϵ�y(t��ng)����ʮ����Ҫ�����x��
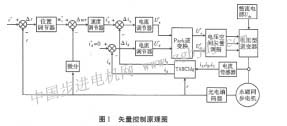
1 pmsmʸ������ԭ��
�����D(zhu��n)�Ӵ���㶨��׃��������ͬ��늙C(j��)�\(y��n)��(d��ng)����ϵ�y(t��ng)ͨ�������D(zhu��n)��λ�ö����ʸ�����Ʒ�ʽ�����IJ���id=0��������Ʒ������˕r(sh��)늴��D(zhu��n)��ֻ�c��������Ľ��S���������ȣ���(sh��)�F(xi��n)�ˌ�(du��)���صĿ��ƅ���(sh��)�Ľ�����(ji��n)���˿����^�̡������ԭ����D1��ʾ��λ���`����̖(h��o)��(j��ng)�^λ���{(di��o)��(ji��)��pi�{(di��o)��(ji��)��ݔ���D(zhu��n)���D(zhu��n)�ٽo����̖(h��o)wt��Ӌ(j��)���ٶ��`����̖(h��o)����(j��ng)�ٶ��{(di��o)��(ji��)��pi�{(di��o)��(ji��)��ݔ��ֱ�S�c���S늉�ָ����̖(h��o)ud��uq����(j��ng)�^park��׃�Q�õ������oֹ��������(bi��o)ϵ�y(t��ng)�е�늉�ָ����̖(h��o)ud��up������늉����gʸ���{(di��o)�Ƽ��g(sh��)( svpwm)�@�Ì�(sh��)�H����늉�svpwm��̖(h��o)������늉�Դ��׃���_�P(gu��n)��B(t��i)����(sh��)�r(sh��)����늙C(j��)���D(zhu��n)�ء�
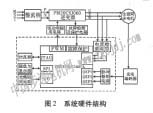
2ϵ�y(t��ng)��Ӳ���M��
����(j��)ʸ������ԭ�����O(sh��)Ӌ(j��)ϵ�y(t��ng)��Ӳ���Y(ji��)��(g��u)��D2��ʾ�����]��ϵ�y(t��ng)�Ŀ��ɔ_�ԣ���(sh��)�F(xi��n)��(qi��ng)��늸��x����ϵ�y(t��ng)Ӳ���֞�ɂ�(g��)���֣���dsp tms320lf2407a����ĵĿ����·�壨̓����(n��i)���֣��ͻ���ipm�Ĺ����(q��)��(d��ng)�·�塣
�����·����tms320lf2407aоƬ���Դģ�K������z�y(c��)ģ�K�����a����̖(h��o)�}�_�����·������ӿڡ�rs232ͨ�Ž��ա��I�P�c�@ʾ���ӿڵȽM�ɡ������(q��)��(d��ng)�·���Ɇ���ɿ�������db35 -10������ģ�Kpm20csj060���(q��)��(d��ng)���x�·�����ϙz�y(c��)�����o(h��)�·�ȽM�ɡ�
2.1��̖(h��o)�z�y(c��)�·
����ϵ�y(t��ng)���õ�����ͬ��늙C(j��)������(li��n)�ӣ��������������ȫ��(du��)�Q(ia+ib+ic=o)�����ֻ��ɘӃ���������ɡ��@���x�ÿ��{(di��o)�������������la28 -np���x��1000��5���є�(sh��)�ȣ�������ݔ�����ֵ��(0~+lo)ma����tms320lf2407a��a/d�D(zhu��n)�Q���ɽ��ܵIJɘӷ�����(o~3.3)v�ΘO����̖(h��o)������Ҫ����������ݔ�������(j��ng)�^��̖(h��o)�{(di��o)���·֮������adcino��adcin1�D(zhu��n)�Q���M(j��n)�вɘӡ�
ϵ�y(t��ng)���ü�늘O�_·ݔ����1024������ʽ���a���z�y(c��)����·����λ���}�_��̖(h��o)a��b-·��λ�}�_��̖(h��o)z��(j��ng)������x�����։����D(zhu��n)�Q��dsp�ɽ���o��3.3 v��̖(h��o)������qep1��qep2��qep3�ӿڡ�
2.2 ipm��̖(h��o)���x�����ϱ��o(h��)�·
����ipm��(n��i)��������icbt�(q��)��(d��ng)�·��������ʹ�Õr(sh��)�Ɍ�dspݔ����pwm��̖(h��o)��(j��ng)����hcpia505оƬ���x������74ls244�i��������ݔ���oipm��pwm��̖(h��o)ݔ��ˣ�pwm��̖(h��o)���x�·��D3��ʾ��
ipm��u��v��w�����ÿ��(g��)�Ϙ�۶������Լ���(d��)����scc��·����oc���^������uv��Ƿ������ot���^�ᣩ�ķN�Ա��o(h��)�·����������۹���һ��(g��)���o(h��)�·����u(p��ng)���Ϙ�۞�������(d��ng)u������һ�N��·���^����Ƿ�����^�ᱣ�o(h��)�·��(d��ng)���r(sh��)��ufoݔ��һ���ƽ���ɴ��O(sh��)Ӌ(j��)ipm���ϱ��o(h��)��D4��ʾ��pm�����Ϙ�۵Ĺ���ݔ����̖(h��o)ufo. vfo��wfo����۵Ĺ���ݔ����̖(h��o)fo��(j��ng)���ٹ���pc817��(j��ng)�c�T߉���ã�ֻҪ������һ��(g��)���ϣ��͕�(hu��)���c�T��ݔ���a(ch��n)��һ��(g��)���ƽ����(j��ng)��ͨ�V���������˵�����rs�|�l(f��)����s�ˣ�ʹ�|�l(f��)���Ĵ�˹�����̖(h��o)���˕r(sh��) |