����늙C�o�ٶȂ�����ʸ������ϵ�y�о�
����ƽ�����������y�x���� ƽ
���ؑc��Wݔ����b�估ϵ�y��ȫ�c�¼��g�������c����ң��ؑc400044��
ժҪ�������˟o�ٶȂ�����ʸ�����ƺͿ��gʸ���}���{��( svpwm)�Ļ���ԭ��������ˎ��a����늉�ģ�ʹ�朼��D�ٹ��㷽����ԓ�������]���˷e���`��Ͷ�����裬������ȫ�ٶȷ����ȵõ��^�õĴ�ͨ���D�ٹ�Ӌ������tms320f2808���F�ˮ���늙C�o�ٶȂ�����ʸ������ϵ�y���o����ϵ�yӲ����ܛ���OӋ������ԇ�Y������ϵ�y�������õĄ��o�B���ܺͷ����ԡ�
�P�I�~��svpwm������늙C���o�ٶȂ����������a����늉�ģ�ͣ�ȫ�ٶȷ���
�ЈD���̖��tm343 �īI��־�a��a ���¾�̖��1001-6848(2010)07-0069-04
o�� ��
�ڮ���늙C����ϵ�y�У���M���x���ܿ��Ƶ�Ҫ��������ٶ��]�h���ƣ����Ҫ�y������늙C�D�١����y��늙C�D�ٜy���b�ö���Üy�ٰl늙C���는����}�_���a�����������˿���ϵ�y�ɱ������ڰ��b�c�S�o�ϵ����y����ʹϵ�y���ܸɔ_��������ϵ�y�ɿ��ԣ��Ҳ��m���ڐ��ӭh�����S�����gʸ���}���{��( svpwm)���g�͔�����̖̎����( dsp)�ij��F���lչ��ʹ�Ï��s���D�ٹ��㼰�����㷨���Ԍ��F����ˮ���늙C�o�ٶȂ�����ʸ������ϵ�y���о��������롣����ᘌ�����늙C�o�ٶȂ�����ʸ�������㷨�Ђ��y��늉��������朹�Ӌģ�͵�ȱ�c��������µĎ��a����늉�ģ�ʹ�朼��D�ٹ��㷨��������dsp tms320f2808���F�ˮ���늙C�o�ٶȂ�����ʸ������ϵ�y��
1 svpwmԭ��
svpwm�㌢��׃����늄әC����һ�����w��������׃���_�Pģʽ��늙C늉����gʸ���ă���ϵ��ͨ�^������׃�����_�Pģʽ��ʹ늙C�Ķ���늉����gʸ���؈A��܉�E�\�ӣ��Ķ����@�����D���}�ӣ��c���y��spwm��ȣ����_�P�������_�P�Δ����Ԝp��,1/3��ֱ��늉��������ʿ���߰ٷ�֮15���ܫ@���^�õ��C������Ч���������ڌ��F���ֻ����ơ�
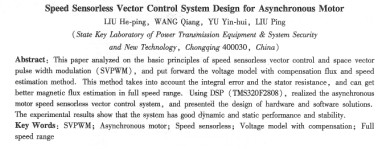
���õ�����늉�Դ��׃���·�Y����D1��ʾ��
������׃������8�N�_�P��B���Ϙ�ی�ͨ�_�P��B��1����ی�ͨ�_�P��B��0���Ķ�����8�N�������g늉�ʸ�������Ѓɂ�����늉�ʸ��(o0��o111)������6������늉����gʸ����uo��u60��u120��u180��u24o��u300���ڿ��g����60�ȣ���������늉����gʸ�������������ăɂ�����늉����gʸ����ux��ux+60���̓ɂ���늉����gʸ��(o0��o111)��ƽ����߅�η��t�ϳɵõ�����D2��ʾ��
2�o�ٶȂ�����ʸ�����Ʋ���
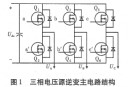
�o�ٶȂ�����ʸ�����Ʋ���ȡ���˾��еͿɿ��Ե�ȱ�c���ٶȂ������������������לy���õ���늙C����늉�����������̖��ͨ�^һ�����㷨�@��늙C���D�١����}���P�I������ο��ٹ���õ��D�ٵ���Ϣ���ұ����^�ߵĿ��ƾ��ȣ��M�㌍�r���Ƶ�Ҫ��ˣ��OӋ�����¿���ϵ�y����ԭ����D��D3��ʾ��
2.1�D�Ӵ�朹�Ӌ
���D�Ӵň������ʸ������ϵ�y�У��D�Ӵ�朵Ĝʴ_��Ӌ�Ϳ�����Ӱ�늙C�������ܵ��P�I����֮һ���D�Ӵ�朹�����늉�ģ�ͺ����ģ�̓ɷN�����y��늉�ģ�ͷ��㷨���Σ���늙C����׃��Ӱ�С�����ǵ��ٕr�^�y���_���^�ͣ����Ҽ��e�֭h�����`��e�ۺ�Ư�Ɔ��}���أ����y�����ģ�ͷ����漰���e��헣����^�yֵ�ǝu���Ք��ģ����ٵ��^�y������늉�ģ�ͷ������Ǹ��ٕr������ߣ��������D�ӕr�g����Ӱ��^�����M�Ќ��r���R���ܱ��C����^�y���_�ȡ�
���Č�늉�ģ�ͺ����ģ�ͽY�����������D�Ӵ�朣������ģ��Ӌ��Ĵ���M��pi�\�㣬����pi�\��ĽY���a��늉�ģ�͵Ĵ�朣�ͨ�^�{��pi������ֵ��ʹ���ڸ��ٕr늉�ģ������Ҫ���ã����ٕrʹ���ģ������Ҫ���ã��Ķ��˷���늉�ģ�ͺ����ģ�͵�ȱ�c������˹���Ĝʴ_�ԡ�< |