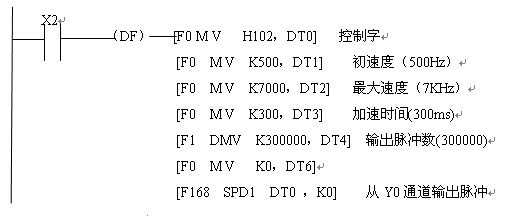
һЩ���ƺ��λ�Ҫ��ͳɱ����\�ӿ���ϵ�y�У������ò��M늙C������Ԫ�������M늙C���@�N���È�����****�ă����ǣ������_�h��ʽ���ƶ��o�跴�����܌�λ�ú��ٶ��M�п��ơ���Ҳ�������ؓ�dλ�Ì������·�]�з��������M늙C�ͱ�����_푑�ÿ�΄��׃�����������l���x����늙C���܉��Ƶ��µ�λ�ã���ô���H��ؓ�dλ���������������ڴ���λ�ó��F****�`����l��ʧ���F����^�_�F����˲��M늙C�_�h����ϵ�y�У���η�ֹʧ�����^�_���_�h����ϵ�y�ܷ������\�е��P�I��
ʧ�����^�_�F��քe���F�ڲ��M늙C���Ӻ�ֹͣ�ĕr��һ����r�£�ϵ�y�ĘO�ކ����l�ʱ��^�ͣ���Ҫ����\���ٶ��������^�ߡ����ϵ�y��Ҫ����\���ٶ�ֱ�ӆ��ӣ����ԓ�ٶ��ѳ��^�O�ކ����l�ʶ������������ӣ��p�t���ܰl���G�����t�������܆��ӣ��a�����D��ϵ�y�\�������Ժ�����_���K�c�r����ֹͣ�l���}�_������������ֹͣ���t����ϵ�y�T�����ã�늙C�D�ӕ��D�^ƽ��λ�ã����ؓ�d�đT�Ժܴ�ʹ���M늙C�D���D���ӽ��K�cƽ��λ�õ���һ��ƽ��λ�ã�����ԓλ��ͣ�¡�
���˿˷�ʧ�����^�_�F���ڲ��M늙C��ͣ�r�M����D1��ʾ�������ٿ��ơ�
�ĈD1���Կ�����L2�Ξ�����\�У�L1�Ξ����l��L3�Ξ齵�l�����ա�ʧ�����Ķ��x�������L1��L3���������½��Ŀ����l��׃�����ڲ��M늙C��푑��l��׃�������M늙C�͕�ʧ����ʧ�������²��M늙Cͣ�D��������Ӱ�ϵ�y��������������ˣ��ڲ��M늙C׃���\���У�����M�����_�������ٿ��ơ�
�Æ�Ƭ�C����λ���Ɔ�Ԫ�����C�����M늙C�M�мӜp�ٿ��ƣ����H�Ͼ��Ǹ�׃ݔ���}�_�ĕr�g�g�������ٕrʹ�}�_����u���ܣ��p�ٕrʹ�}�_����uϡ�衣���ö��r���Дʽ����늙C׃�ٕr�����H���Dz����׃���r���b�dֵ�Ĵ�С��
��Ƭ�C�ڿ���늙C�Ӝp�ٵ��^���У�һ�����xɢ�����ƽ�������������������Ӝp�ٵ�б����ֱ�������^���У��ٶȲ����B�m׃�������ǰ��֙n�A��׃�������cҪ�������б����ƽ�����횴_��ÿ���_�A�ϵ��\�Еr�g��Ҋ�D3��
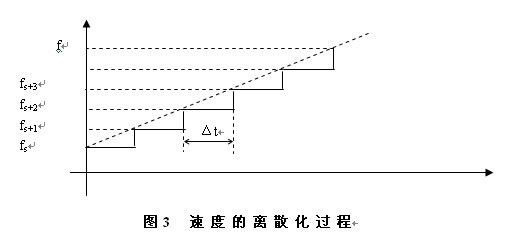
�r�g��tԽС������Խ�죬��֮Խ������t�Ĵ�С������Փ���_���������������ֲ�ʧ����ԭ�t��ÿ���_�A���\�в������Ns=fs��t=s��N����ӳ��ÿ���ٶ��_�A�\�в����c��ǰ�ٶ�s֮�g���Pϵ����������^���У�ÿ���ٶ���һ�n����ҪӋ���@���_�A���ߵIJ�����Ȼ�����f�p��ʽ�z�飬���p����r��ԓ�n�ٶ��\���ꮅ��������һ�n�ٶȡ�
늙C�������^���У������ٿ������M���f�p���������p����r�����^�̽Y�����D������\�D�^�̡��p���^�̵�Ҏ���c�����^����ͬ��ֻ�ǰ��෴������M�С��ڲ��M늙C�Ć�ͣ�^���У���������ϵ�y�ľ��w���c�������������N�����ٿ��Ʒ�ʽ֮һ�������Ա���늙Cʧ�����^�_���_�����^���_�Ŀ��ơ�
ϵ�҂�
�Ԓ��18801063276����������
QQ��928221169
�Ԍ���http://zgbjdj.com/news2.asp?id=9440 |



