1.һ�N�p�ŷ�늙C���әCе�f�{�b�ã����������ڣ������C��(3)���ŷ�늙CA(1)�� �ŷ�늙CB(15)������A(2)������B(14)���B�UA(5)���B�UB(7)���B�UC(12)�͌��U(10)���� ��������A(2)������B(14)���B�UA(5)���B�UB(7)���B�UC(12)����һ�������ɶȵIJ��C �������U(10)ͨ�^�D�Ӹ�C(8)�B�����B�UB(7)�ϣ������Ķ����ɶȵIJ��C���������ŷ�늙CA(1)���ŷ�늙CB(15)������A(2)������ B(14)���B�UA(5)���B�UB(7) ���B�UC(12)���������ŷ�늙CA(1) �c����A(2) �B�ӣ�����A(2)�c�B�UA(5)ͨ�^�D�Ӹ�A(4)�B�ӣ��ŷ�늙CB(15)�c����B(14)�B�ӣ�����B(14)�c �B�UC(12)ͨ�^�D�Ӹ�E(13)�B�ӣ��B�UB(7) ��һ���c�B�UA(5) ��һ�����D�Ӹ�B(6)�B �ӣ��B�UB(7) ����һ���c�B�UC(12) ��һ�����D�Ӹ�D(11)�B�ӡ�
2.��������Ҫ��1������һ�N�p�ŷ�늙C���әCе�f�{�b�ã����������ڣ������� �D�Ӹ�A(4)���D�Ӹ�B(6)���D�Ӹ�C(8)���D�Ӹ�D(11)���D�Ӹ�E(13) ���S������ƽ�С�
���g�I��
[0001] �����������漰һ�N呉��Cе���g�I����b�ã����w��һ�N�����C���p�ŷ�늙C
���әCе�f�{�b�á�
�������g
[0002] �����C�ǽ��ٳ��μӹ��I���ЏV��ʹ�õ�呉��O�䣬Ʒ�N�͔������࣬�����ԙC е�����C�������V�����F�����켼�g�İlչҪ�����C���H�܉���ٶȡ��߾��ȡ���ؓ�d
�\�D�����ґ����и�������ԣ���Ѹ�١�����ظ�׃ݔ���\��Ҏ�ɡ����y�ęCе�����C�\�� ���Ԇ�һ����ˇ�m���Բ������S�������ŷ�늙C�ӳ����b�似�g���lչ�����F��
���K�\���������{�ĸ��N�����ŷ��Ӊ����C��ʹ�É����C�Ĺ������ܺ�ˇ�m���Դ�� ��ߣ��O�䳯�����Ի������ܻ��ķ���lչ��
[0003] ��ͨ�Cе�����Cһ����ø��N��ͬ�ęCе���әC���@�ù�ˇ����Ļ��K�\��Ҏ �ɣ��ԝM�㲻ͬ�Ĺ�ˇҪ���y�ęCе�����Cͨ�^�x���m���Ĉ��ЙC�����䘋���ijߴ磬 �õ�һЩ�M��_����ˇҪ��ĵ����\��Ҏ�ɣ���һ�N�Y�������o���M���N�����\��Ҏ�� ��Ҫ���mȻ����ƫ���������K�C�������B�U�C�����LjA�X݆�C���ȿ��Բ��ָ�׃ij�N�� �C���Ļ��K�\��Ҏ�ɣ��������U���ijߴ煢���_�����K���\������Ҳ�S֮�_��������� �������ԣ��y�����ڲ�ͬ�ě_����ˇ���������ŷ�늄әC�����ڙCе�����C���о�ʼ�������o90�������������������W�����о����ģ�ԓ����S.Yossifon and R.Shivpuri��� ���ɽ����ŷ�늄әC�ӝL��z�ܻ�������ͨ�^���U�C�����\���D���黬�K������\�ӣ�
���ܘO����ظ�׃���K���\���������@�ò�ͬ�Ĺ���׃���ٶȣ��m���ڲ�ͬ�ě_����ˇ���� �C�_�������|����֮�����ŷ�늄әC�����ڙCе�����C���о�Ѹ�ٰlչ���ձ������ô��ȇ����M����������о����ձ�С�ɺ͕���ȹ�˾�քe�_�l�˸��ԵĽ����ŷ�늄әC��
�͉����C��
[0004] ���^���F�м��g�ęz���l�F��komatsu��˾��HCP3000�����_12kW�ŷ�늄әCͨ�^
Ƥ�����Ԫ����Ӄ��םL��z�ܣ�ͨ�^�z�U����ĸֱ�ӎ��ӛ_�����K���乫�Q�����H�_�� 800kN��komatsu��˾��H2F300���Ƀ��_100kW�ŷ�늄әCͨ�^Ƥ���քe�Ӄ��םL��z�ܣ���ͨ�^���ת������B�U�C����ͬ�ӛ_�����K���乫�Q�����_��3000kN��
[0005] ����F�е��ŷ������C�әC�����l�F���ęC���W�ĽǶȁ��������������C��
���әC����������ɶșC�����ŷ�늙C�����D(����) ���Ƅ�(�L��z��) ��ʽֱ�ӻ�ͨ �^���B�U�C���ӛ_�����K�������ɶșC�����F�_���\�ӵ�ԭ�t�Ǒ���һ�_�ŷ�늄әC�
�ӡ�����ŷ������C�әC�����Ãɂ��ŷ�늙C�����ӣ��@�ɂ��ŷ�늙C��횱��C�r�r ͬ�����Ա���ݔ�벻ͬ����ɵ��\�Ӹ��档�@���mȻ��������ݔ�빦�ʣ����C�ij��Ή�
�����s�����˿��Ʋ��Ե��y�ȣ����ҿ��Ƶķ�����׃���һ��ݔ���`�������әC��
�o���������������l���p�ġ�
�l������
[0006] ���Q�F�м��g���ڵ��������}������������Ҫ�OӋһ�N�����a����ݔ���`��� �����������桢�ҿ��Ʒ����Ժõ��p�ŷ�늙C���әCе�f�{�b�á�
[0007] ���ˌ��F����Ŀ�ģ����������͵ļ��g�������£�һ�N�p�ŷ�늙C���әCе�f �{�b�ã������C�ܡ��ŷ�늙CA���ŷ�늙CB������A������B���B�UA���B�UB���B�UC�͌��U����
��������A������B���B�UA���B�UB���B�UC����һ�������ɶȵIJ��C�������Uͨ�^�D�Ӹ� C �B�����B�UB �ϣ�
[0008] �����Ķ����ɶȵIJ��C���������ŷ�늙CA���ŷ�늙CB������A������B���B�UA�� �B�UB���B�UC���������ŷ�늙CA �c����A�B�ӣ�����A �c�B�UAͨ�^�D�Ӹ�A�B�ӣ��ŷ�
늙CB �c����B�B�ӣ�����B �c�B�UCͨ�^�D�Ӹ�E�B�ӣ��B�UB ��һ���c�B�UA ��һ���� �D�Ӹ�B �B�ӣ��B�UB ����һ���c�B�UC ��һ�����D�Ӹ�D �B�ӡ�
[0009] �����������������D�Ӹ�A���D�Ӹ�B���D�Ӹ�C���D�Ӹ�D ���D�Ӹ�E ���S������
ƽ�С�
[0010] �c�F�м��g��ȣ����������;�����������Ч����
[0011] 1������������ᘌ��F�м��g���ڵ��������㣬�ṩһ�N���ډ����C���p�ŷ�늙C �әCе�f�{�b�ã����ö����ɶȲ��C�����pݔ�����ԣ��ԃɂ��ŷ�늙C��������ݔ
�룬ͨ�^�B�U��ͬ��һ�����U������܉��ֱ���\�ӡ�ԓ���U����ֱ���ӛ_�����K��߀�� ���B�Ӿ����������õ���U�C���ӛ_�����K�����ŷ�늙CA���ŷ�늙CB��ͬ���ӕr����������A ������B ��λ��һ�£��M��ʹ���B�UA ���B�UC �����Q�\�ӣ��B�UA ���B�UC�� ͬ���B�UB �@���D�Ӹ�C ��С���D�\�ӣ��ȱ����˃��_늙Cݔ�벻ͬ����ɵ��\�Ӹ�
�棬��ʹ�Ãɂ��ŷ�늙C���ʵ��ԯB��ݔ��������ԓ�b�Åf�{�ϳɃɂ��ŷ�늙C�����Ե� �������ŷ������C�������a����ݔ���`�������ă������档
[0012] 2�����������ͽY�����Ρ��������ף�����ɱ��ͣ��܉�ܺý�Q�F���ŷ������C�p �ŷ�늙C�����Ӷ������ͬ�����Ƴɱ��ߺͿɿ��Բ�Ć��}�����ŷ������C�әC�����Ãɂ��ŷ�늙C�����ӕr����회��@���_�ŷ�늙C�M��ͬ�������Ա��C���_�ŷ�늙C�r �rͬ������t�͕����F�ŷ�늙C���������C���\�Ӹ���Ȇ��}�������ڿ����`�ϵ�y�`��Cе���wĥ�p��ԭ��ʹ��ͬ�������^�����y���ҿɿ��Բ���ñ��������ͣ�����ͨ�^ �Cе�f�{���������_�ŷ�늙C��ݔ���`������،����_�ŷ�늙C�M��ͬ������߿��Ʒ�
���ԡ�Ŀǰ��������δҊ������ڱ����������p�ŷ�늙C�әCе�f�{�b�õ��īI�����
���D�f��
[0013] ���������̓H�и��D1�������У�
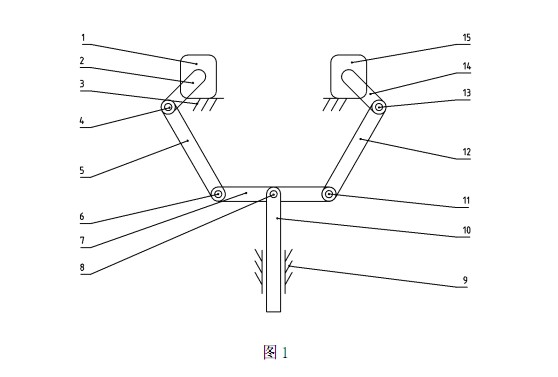
[0014] �D1�DZ��������͵ĽY��ʾ��D��
[0015] �D�У�1���ŷ�늙CA��2������A��3���C�ܣ�4���D�Ӹ�A��5���B�UA��6���D�Ӹ�B��7���B�U
B��8���D�Ӹ�C��9����܉��10�����U��11���D�Ӹ�D��12���B�UC��13���D�Ӹ�E��14������B��15���ŷ��
�CB��
���w��ʩ��ʽ
[0016] ����Y�ϸ��D�͌�ʩ����������������Ԕ���f������D1��ʾ��һ�N�p�ŷ�늙C
���әCе�f�{�b�ã������C��3���ŷ�늙CA1���ŷ�늙CB15������A2������B14���B�UA5��
�B�UB7���B�UC12�͌��U10������������A2������B14���B�UA5���B�UB7���B�UC12����һ �������ɶȵIJ��C�������U10ͨ�^�D�Ӹ�C8�B�����B�UB7�ϣ�
[0017] �����Ķ����ɶȵIJ��C���������ŷ�늙CA1���ŷ�늙CB15������A2������B14�� �B�UA5���B�UB7���B�UC12���������ŷ�늙CA1�c����A2�B�ӣ�����A2�c�B�UA5ͨ�^�D�Ӹ�A4�B�ӣ��ŷ�늙CB15�c����B14�B�ӣ�����B14 �c�B�UC12ͨ�^�D�Ӹ�E13�B�ӣ��B �UB7 ��һ���c�B�UA5 ��һ�����D�Ӹ�B6�B�ӣ��B�UB7 ����һ���c�B�UC12 ��һ�����D
�Ӹ�D11�B�ӡ��������D�Ӹ�A4���D�Ӹ�B6���D�Ӹ�C8���D�Ӹ�D11���D�Ӹ�E13 ���S������ƽ�С�
[0018] ����ʩ���Ĺ���ԭ�����£��ŷ�늙CA1���O���\��Ҏ���D�ӣ�������A2�D�ӣ�
�ŷ�늙CB15���O���\��Ҏ���D�ӣ�������B14 �D�ӡ�����A2ͨ�^�B�UA5������B14ͨ
�^�B�UC12��ͬ���B�UB7�\�ӣ��B�UB7�ӌ��U10 �،�܉9�M�������\�ӡ��ɴˣ������ڃ��_�ŷ�늙C���\�Ӻ������f�ϳ��ڌ��U10�ϡ�
[0019] ����ʩ�����Ա��������ͼ��g������ǰ�����M�Ќ�ʩ���o����Ԕ���Č�ʩ��ʽ��
���w�IJ����^�̣������������͵ı��o���������������Č�ʩ����
|
�YӍ���������
�Ԓ��18801063276
qq̖��928221169
�Ԍ�id:�r����Ⱥ66
�Ԍ���䁣�http://zgbjdj.com/news2.asp?id=9440 |
�YӍ��������
�Ԓ��13521040277
qq̖��2539844470
�Ԍ�id:�r����Ⱥ888
�Ԍ���䁣�http://www.gfzfw.cn/bbs_read.asp?id=4220
|
|



