�ŷ�늙C(j��)ʹ��λ�ÿ��ƕr(sh��) ��ô�ӷ����}�_��
��λ�ÿ��Ʒ�ʽ�r(sh��)��������̖(h��o)PUL��/DIR����CW/CCW��
�ŷ��(q��)��(d��ng)����λ�ÿ���ģʽ�r(sh��)�ɿ���ϵ�y(t��ng)�ṩλ���}�_��̖(h��o)��늙C(j��)������̖(h��o)����̖(h��o)�ЃɷN��ʽ���}�_+����ʽ����ؓ(f��)�p�}�_��ʽ
��ʽһ���}�_+����PUL��/DIR��
1�� λ���}�_��̖(h��o)PUL��
n ����ϵ�y(t��ng)�o���}�_��̖(h��o)����(j��ng)�^�(q��)��(d��ng)����(n��i)��������X݆����늙C(j��)�D(zhu��n)�����D(zhu��n)��
n �(q��)��(d��ng)����(n��i)���Ŀ����㷨ʹ늙C(j��)�D(zhu��n)�Ӹ��S�}�_��̖(h��o)����
n λ��ƫ��ԽС���\(y��n)���^���е�λ�þ���Խ�ߣ���(d��ng)λ��ƫ��С�ڻ���ڡ���λ��ɽ羀ֵ���r(sh��)���J(r��n)�鶨λ����ɡ�����̖(h��o)���(q��)��(d��ng)����(n��i)�����ù����M(j��n)�и��x����Ҋ�D����
2�� 늙C(j��)�����ƽ��̖(h��o)DIR��
n ����̖(h��o)�Q��늙C(j��)�����D(zhu��n)����
n ����̖(h��o)����ƽ�r(sh��)늙C(j��)��형r(sh��)����D(zhu��n)������̖(h��o)����ƽ�r(sh��)늙C(j��)�t�鷴������r(sh��)����D(zhu��n)���˷N�Q��ʽ���Q֮����}�_��ʽ��
��ʽ���������p�}�_��CW/CCW -- ����ϵ�y(t��ng)�քe�o����������}�_��̖(h��o)����(j��ng)�^�(q��)��(d��ng)����(n��i)��������X݆����늙C(j��)�D(zhu��n)�����D(zhu��n)��
2.��ʹ����̖(h��o)EN��
����̖(h��o)�ڲ��B�ӕr(sh��)Ĭ�J(r��n)����Ч��B(t��i)���@�r(sh��)�(q��)��(d��ng)��������������(d��ng)����̖(h��o)��·��(d��o)ͨ�r(sh��)���(q��)��(d��ng)��ֹͣ�������@�r(sh��)늙C(j��)̎�ڟo���ؠ�B(t��i)���ஔ(d��ng)��Ó�C(j��)��̖(h��o)��������̖(h��o)���x����̖(h��o)������̖(h��o)���(q��)��(d��ng)����(n��i)�����ù����M(j��n)�и��x����Ҋ�D����
3.���(q��)��(d��ng)�������·�ӿڈD��
n ����ʹ����ϵ�y(t��ng)���(q��)��(d��ng)���܉�������ͨ�ţ�������ɔ_���҂�?c��)��?q��)��(d��ng)����(n��i)�����ù���������(du��)������·ݔ����̖(h��o)�M(j��n)�и��x����·��̖(h��o)�ă�(n��i)���ӿ��·��ͬ����(n��i)�����ù�����x��ʽ�B�ӡ��}�_��̖(h��o)����CP+/CP-�ˣ�������̖(h��o)����DIR+/DIR-�ˣ�ʹ����̖(h��o)����EN+/EN-�˼��ɡ�
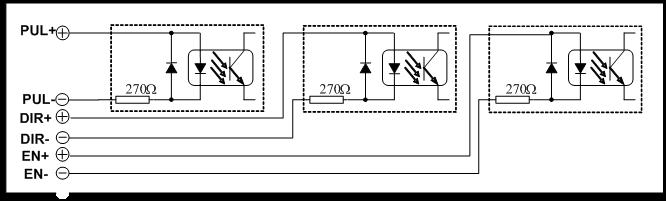
�(q��)��(d��ng)��ݔ����̖(h��o)��(n��i)���ӿ�ʾ��D
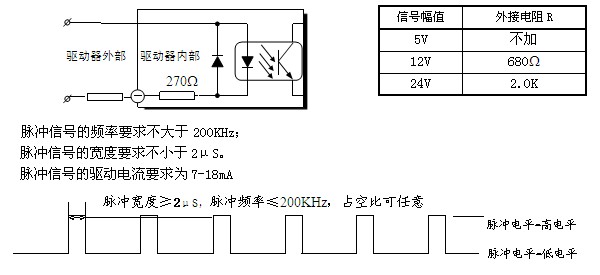
n ����(q��)��(d��ng)��ݔ����̖(h��o)��늉���̖(h��o)��Ҫ��3.6V�ܸ��ƽ��5.5V�� -5.5V�ܵ��ƽ��0.3V����õĞ�TTL�ƽ��
n ����(q��)��(d��ng)��ݔ����̖(h��o)�������̖(h��o)��Ҫ��7mA�ܸ������18mA�� -18mA�ܵ������0.2mA��
n ������늉���̖(h��o)߀�������̖(h��o)����K�D(zhu��n)�������������ݔ��������_(d��)����̖(h��o)��ݔ?sh��)�Ŀ�ģ������ψD�������늉���̖(h��o)�ķ�ֵ��������Ҫ��ķ�������ⲿ�����������R�����C�o�(q��)��(d��ng)����(n��i)�������ṩ7-18mA���(q��)��(d��ng)�������Ҋ�D���±���
�����r(sh��)����Ⱥ����Ƽ�����˾
�a(ch��n)Ʒ�x�;W(w��ng)ַ��http://www.gfzfw.cn/bbs_read.asp?id=4220/category-682194358.htm
(li��n)ϵ�ˣ������ (li��n)ϵ�Ԓ��13521040277
QQ��2539844470 |




