1. һ�N����ͬ��늙C(j��)�ŷ�����������������ϵ�y(t��ng)�����������ڣ�����PC �C(j��)����̖�D(zhu��n)�Q
����PMSM �����������У�PC �C(j��)ͨ�^��̖�D(zhu��n)�Q���cPMSM �ŷ��������B�ӣ�PC �C(j��)��PMSM ģ��
�Ŀ��ƅ���(sh��)ͨ�^��̖�D(zhu��n)�Q���l(f��)�ͽoPMSM �������M(j��n)��̎����̎���Y(ji��)����(j��ng)��̖�D(zhu��n)�Q������PC
�C(j��)����PMSM ģ�ͣ�ͬ�rPC �C(j��)�ɼ�PMSM ģ�ͮ�(d��ng)ǰ��B(t��i)����(sh��)������(j��)��(d��ng)ǰ��B(t��i)����(sh��)��PMSM ģ��
���ƅ���(sh��)�M(j��n)���{(di��o)�����γ������]�h(hu��n)��������̖�D(zhu��n)�Q����������оƬ��ͨ�ż�JTAG ���dоƬ
��USB �D(zhu��n)����оƬ�����У�ͨ�ż�JTAG ���dоƬ�c����оƬ�B�ӣ�PC �C(j��)ͨ�^USB �D(zhu��n)����о
Ƭ�cͨ�ż�JTAG ���dоƬ�B�ӡ� 2. ���(qu��n)��Ҫ��1 ����������ͬ��늙C(j��)�ŷ�����������������ϵ�y(t��ng)�����������ڣ����� ����оƬ����STM32F103ZCT6��
3. ���(qu��n)��Ҫ��1 ����������ͬ��늙C(j��)�ŷ�����������������ϵ�y(t��ng)�����������ڣ����� ͨ�ż�JTAG ���d����STM8S103 оƬ��
4. ���(qu��n)��Ҫ��1 ����������ͬ��늙C(j��)�ŷ�����������������ϵ�y(t��ng)�����������ڣ����� �D(zhu��n)USB �D(zhu��n)����оƬ����PL2303hx��
���g(sh��)�I(l��ng)��
[0001] ����(sh��)�������漰һ�N����ͬ��늙C(j��)�ŷ�����������������ϵ�y(t��ng)��
�������g(sh��)
[0002] Ŀǰ����������ͬ��늙C(j��)(PMSM) �ŷ�����ϵ�y(t��ng)�ķ��棬��Ҫ�ǽ�����Matlab/
Simulink ��������ͬ��늙C(j��)�Ĕ�(sh��)�W(xu��)ģ�ͣ�����늉����gʸ���}���{(di��o)��(SVPWM) ��ԭ������
����Matlab/Simulink �д����ģ�͌�(sh��)�F(xi��n)�ġ��@�N��(sh��)�W(xu��)����ķ����mȻģ�ͽ�(j��ng)��(j��)����
���㡢���ڶ̣��������H�H�Ǫ�(d��)���ڌ�(sh��)�H���̵��ֶΣ��c���̌�(sh��)�H���^����x���y�Ԝ�(zh��n)�_��
ӳ늙C(j��)���(xi��ng)�ӑB(t��i)���ܣ����ܞ錍(sh��)�HPMSM ����ϵ�y(t��ng)���O(sh��)Ӌ(j��)�ṩ��Ч����(j��)�����������漼�g(sh��)��
��˷���(sh��)�W(xu��)����ıˣ��ѱ���(y��ng)�õ����̙C(j��)е�IJ����b�á���܇��ӿ��������о��Լ�ģ
�M�w�п������ȣ����ǣ�Ŀǰᘌ�����ͬ��늙C(j��)������������ŷ�ϵ�y(t��ng)����ϵ�y(t��ng)���ИI(y��)��(n��i)
�ԛ]�����P(gu��n)�đ�(y��ng)�ú��_�l(f��)��
�l(f��)����(n��i)��
[0003] ᘌ������F(xi��n)�м��g(sh��)�д��ڵ�ȱ�ݻ��㣬����(sh��)�����͵�Ŀ�����ڣ��ṩһ�N����
ͬ��늙C(j��)�ŷ�����������������ϵ�y(t��ng)��ԓϵ�y(t��ng)�܉�?q��)�PC �C(j��)�И�(g��u)����PMSM ��(sh��)�W(xu��)ģ���cPMSM
�������M(j��n)����Ϣͨ�ţ��γɽӽ����̌�(sh��)�H�������(y��n)�C���]�h(hu��n)�����h(hu��n)�����˷���Ŀǰ���g(sh��)����
��(zh��n)�_�ط�ӳ늙C(j��)�ŷ�����ϵ�y(t��ng)�ĄӑB(t��i)���ܵ�ȱ�c(di��n)��
[0004] �����_(d��)������Ŀ�ģ�����(sh��)�����Ͳ������µļ��g(sh��)��Q������
[0005] һ�N����ͬ��늙C(j��)�ŷ�����������������ϵ�y(t��ng)�����������ڣ�����PC �C(j��)����̖�D(zhu��n)
�Q����PMSM �ŷ������������У�PC �C(j��)ͨ�^��̖�D(zhu��n)�Q���cPMSM �ŷ��������B�ӣ�PC �C(j��)��PMSM
ģ�͵Ŀ��ƅ���(sh��)ͨ�^��̖�D(zhu��n)�Q���l(f��)�ͽoPMSM �������M(j��n)��̎����̎���Y(ji��)����(j��ng)��̖�D(zhu��n)�Q����
��PC �C(j��)����PMSM ģ�ͣ�ͬ�rPC �C(j��)�ɼ�PMSM ģ�ͮ�(d��ng)ǰ��B(t��i)����(sh��)������(j��)��(d��ng)ǰ��B(t��i)����(sh��)��PMSM
ģ�Ϳ��ƅ���(sh��)�M(j��n)���{(di��o)�����γ������]�h(hu��n)��������̖�D(zhu��n)�Q����������оƬ��ͨ�ż�JTAG ���d
оƬ��USB �D(zhu��n)����оƬ�����У�ͨ�ż�JTAG ���dоƬ�c����оƬ�B�ӣ�PC �C(j��)ͨ�^USB �D(zhu��n)��
��оƬ�cͨ�ż�JTAG ���dоƬ�B�ӡ�
[0006] ����(sh��)������߀���������������g(sh��)������
[0007] ��������оƬ����STM32F103ZCT6��
[0008] ����ͨ�ż�JTAG ���d����STM8S103 оƬ��
[0009] �����D(zhu��n)USB �D(zhu��n)����оƬ����PL2303hx��
[0010] ����(sh��)�����͵�����Ч�����£�
[0011] ��PC �C(j��)�И�(g��u)��PMSM ��(sh��)�W(xu��)ģ�ͣ�ͨ�^��̖�D(zhu��n)�Q���c�������M(j��n)���B�ӣ����H��ʹ����
�ܸ���̶Ƚӽ����̌�(sh��)�H�����_��ӳ�ŷ�����ϵ�y(t��ng)���(xi��ng)�ӑB(t��i)���ܣ��cȫ��(sh��)�����ϵ�y(t��ng)��ȣ�
����(sh��)�������־��������M(f��i)�õ͡��������еȃ�(y��u)�c(di��n)��
���D�f��
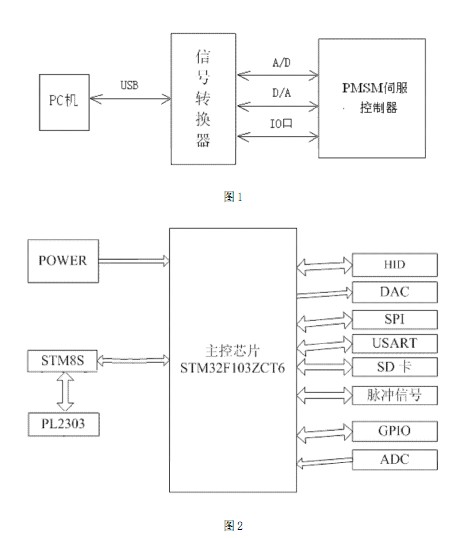
[0012] �D1 �DZ���(sh��)�����͵�ϵ�y(t��ng)�Y(ji��)��(g��u)ʾ��D��
[0013] �D2 ����̖�D(zhu��n)�����ĽY(ji��)��(g��u)ʾ��D��
[0014] ����Y(ji��)�ϸ��D������(sh��)�������M(j��n)һ���f����
���w��(sh��)ʩ��ʽ
[0015] ��D1 ��ʾ������(sh��)�����͵�����ͬ��늙C(j��)�ŷ�����ϵ�y(t��ng)������PC �C(j��)����̖�D(zhu��n)�Q����
PMSM �ŷ������������У�PC �C(j��)ͨ�^��̖�D(zhu��n)�Q���cPMSM �ŷ��������B�ӣ���̖�D(zhu��n)�Q��������
PC �C(j��)�cPMSM �ŷ��������g�D(zhu��n)�Q��(sh��)���cģ�M��̖��PC �C(j��)��PMSM ģ�͵Ŀ��ƅ���(sh��)ͨ�^��̖�D(zhu��n)
�Q���l(f��)�ͽoPMSM �������M(j��n)��̎����̎���Y(ji��)����(j��ng)��̖�D(zhu��n)�Q������PC �C(j��)����PMSM ģ�ͣ�ͬ�r
PC �C(j��)�ɼ�PMSM ģ�ͮ�(d��ng)ǰ��B(t��i)����(sh��)������(j��)��(d��ng)ǰ��B(t��i)����(sh��)��PMSM ģ�Ϳ��ƅ���(sh��)�M(j��n)���{(di��o)�����γ�
�����]�h(hu��n)��
[0016] ��D2 ��ʾ����̖�D(zhu��n)�Q�����Ԍ�(sh��)�F(xi��n)̓�M������̖�c�挍(sh��)������̖���D(zhu��n)�Q����̖�D(zhu��n)
�Q����������оƬ��ͨ�ż�JTAG ���dоƬ��USB �D(zhu��n)����оƬ�����У�ͨ�ż�JTAG ���dоƬ
�c����оƬ�B�ӣ�PC �C(j��)ͨ�^USB �D(zhu��n)����оƬ�cͨ�ż�JTAG ���dоƬ�B�ӣ����У�����оƬ
����STM32F103ZCT6��оƬSTM32F103ZCT6 ���ж���ģ�K�ӿ�(DAC��SPI��USART��SD ������̫
�W(w��ng)�ӿڡ�GPIO��ADC) �ԝM��ͨ����Ҫ��ͨ�ż�JATG ���d����STM8S103 оƬ��USB �D(zhu��n)����о
Ƭ����PL2303hx��
[0017] PC �C(j��)�а��bMATLAB������MATLAB �е�simulink �����佨��PMSM ��(sh��)�W(xu��)ģ�͡�
[0018] ����(sh��)�����͵Ĺ����^�����£�
[0019] ����̖�D(zhu��n)�Q����USB �ӿ��cPC �C(j��)��USB �ӿ����B���ٌ���̖�D(zhu��n)�Q����A/D��D/A ��
���cPMSM �������B�ӣ���̖�D(zhu��n)�Q����늡�PC �C(j��)ʹ��MATLAB ��simulink �����佨��PMSM
��(sh��)�W(xu��)ģ�ͣ����������ɄӑB(t��i)朽ӎ�(dll �ļ�)��Ȼ��ͨ�^��C# ��(sh��)�F(xi��n)�ӑB(t��i)朽ӎ���{(di��o)�Á���
��C# (UI) �еą���(sh��)�cPMSM 늙C(j��)ģ�͵ą���(sh��)��ͨ�ţ�PC �C(j��)��PMSM ģ�Ϳ��ƅ���(sh��)ͨ�^USB2.0
�l(f��)�ͽoPMSM �������M(j��n)��̎������̖�D(zhu��n)�Q����PC �C(j��)������̓�M������̖�D(zhu��n)�Q���挍(sh��)������
̖��Ȼ����ͽoPMSM ��������ͬ�r����PMSM �������l(f��)��������̖����̖�D(zhu��n)�Q����PMSM ����
���l(f��)�����挍(sh��)������̖�D(zhu��n)����̓�M������̖���ͽoPC �C(j��)�е�PWSM ģ�ͣ�PC �C(j��)һ�������
��(sh��)��(j��)������(j��)���յ��Ŀ�����̖��PMSM 늙C(j��)ģ�ͅ���(sh��)�M(j��n)���{(di��o)������һ���棬PC �C(j��)�ɼ�PMSM ��(sh��)
�W(xu��)ģ�͵Ġ�B(t��i)����(sh��)��������͵���̖�D(zhu��n)�Q������(j��ng)��̖�D(zhu��n)�Q�������D(zhu��n)�Q���挍(sh��)������̖����
�o��������Ȼ���ڿ���������ɿ����㷨���ٌ�̎����Ŀ�����̖��(j��ng)�^��̖�D(zhu��n)�Q���D(zhu��n)�Q��
���oPC �C(j��)���،���Ĕ�(sh��)�W(xu��)ģ�ͣ���˷���(f��)���\(y��n)�о��γ���һ���]�h(hu��n)�İ���������ϵ�y(t��ng)��
|
�YӍ���������
�Ԓ��18801063276
qq̖��928221169
�Ԍ�id:�r����Ⱥ66
�Ԍ���䁣�http://zgbjdj.com/news2.asp?id=9440 |
�YӍ��������
�Ԓ��13521040277
qq̖��2539844470
�Ԍ�id:�r����Ⱥ888
�Ԍ���䁣�http://www.gfzfw.cn/bbs_read.asp?id=4220
|
| 

