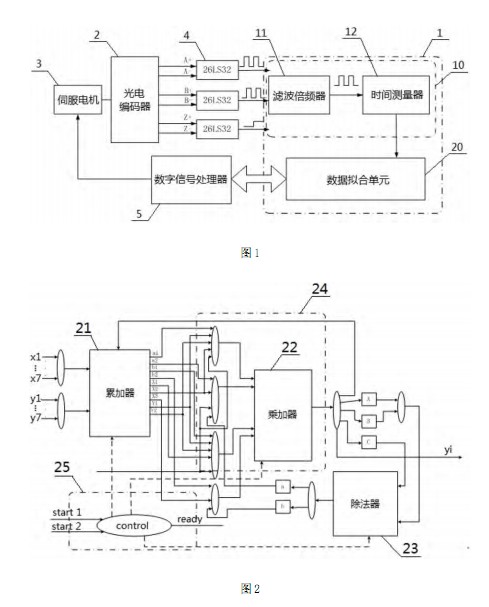
1.һ�N�ŷ�늙C�Č��r�D(zhu��n)�ٙz�yģ�K�����������ڣ�������
��̖�A(y��)̎���Ԫ�����c��늾��a�����B�Խ���������늾��a���l(f��)������̖����ݔ����
��(y��ng)��������늾��a���l(f��)����������̖���ŷ�늙C���D(zhu��n)�Ǻ͕r�g��
��(sh��)��(j��)�M�φ�Ԫ�������������̖�A(y��)̎���Ԫݔ���������D(zhu��n)�Ǻ������r�g�����������D(zhu��n)
���P(gu��n)�������r�g�M�ж��ʽ�M���ԫ@�������ŷ�늙C���D(zhu��n)�١�
2.���(qu��n)��Ҫ��1�������ŷ�늙C�Č��r�D(zhu��n)�ٙz�yģ�K������������̖�A(y��)̎���Ԫ����
����(sh��)��(j��)�M�φ�Ԫ����FPGA оƬ�Ϙ�(g��u)�졣
3.���(qu��n)��Ҫ��1��2�������ŷ�늙C�Č��r�D(zhu��n)�ٙz�yģ�K�������������ʽ�M�ϲ�
n n-1
��n �A���ʽ��y ��f(t) ��p t +p t +L+p t+p �����У�y �������D(zhu��n)
4.���(qu��n)��Ҫ��3�������ŷ�늙C�Č��r�D(zhu��n)�ٙz�yģ�K������������(sh��)��(j��)�M�φ�Ԫ������
С���˷��@������n �A���ʽ����������(sh��)��
5.���(qu��n)��Ҫ��4�������ŷ�늙C�Č��r�D(zhu��n)�ٙz�yģ�K������������늾��a��������ʽ
��늾��a����
6.���(qu��n)��Ҫ��5�������ŷ�늙C�Č��r�D(zhu��n)�ٙz�yģ�K������������̖�A(y��)̎���Ԫ����
��������늾��a����������̖�M���A(y��)̎���������A(y��)̎��������������̖�V���ͱ��l��
7.���(qu��n)��Ҫ��6�������ŷ�늙C�Č��r�D(zhu��n)�ٙz�yģ�K������������늾��a��ݔ������
����̖�Dz����̖��������̖�A(y��)̎���Ԫͨ�^�����̖�D(zhu��n)�QоƬ�B�ӵ�������늾��a����
���������̖�D(zhu��n)�QоƬ��������늾��a��ݔ�������������̖�D(zhu��n)�Q�Ɇζ���̖��ݔ����
����̖�A(y��)̎���Ԫ��
8.���(qu��n)��Ҫ��7�������ŷ�늙C�Č��r�D(zhu��n)�ٙz�yģ�K������������(sh��)��(j��)�M�φ�Ԫ�M����
�����ʽ�M�ϕr�����ÄӑB(t��i)�M���c�xȡ�����������ӑB(t��i)�M���c�xȡ�����飺
1).���������̖�A(y��)̎���Ԫ��һ���ŷ����ڃ�(n��i)���յ�������늾��a���l(f��)������̖��
�t�������ŷ����ڃ�(n��i)���x�����ŷ����ڵ��Д��r���������̖�����M���c���ь���(y��ng)����
����̖�������ŷ�늙C���D(zhu��n)�Ǻ͕r�g���������M���c�Ĕ�(sh��)��(j��)��
2).������(sh��)��(j��)�M�φ�Ԫ�_�J�����M���c�����c֮ǰ��m-1���M���c��������(sh��)��(j��)
�M���������ʽ�M�ϣ��@������n �A���ʽ����������(sh��)��Ӌ�������ŷ�늙C�������Д��r
�̵��D(zhu��n)�٣�����m �c����n ���P(gu��n)ϵ��m ��n+1 ��
3).���������̖�A(y��)̎���Ԫ�������ŷ�늙C��һ���ŷ����ڃ�(n��i)δ���յ�������늾�
�a���l(f��)������̖���t����������(sh��)��(j��)�M�φ�Ԫ�������ŷ����ڵ���һ���ŷ������M��������
�ʽ�M�ϵõ�������n �A���ʽ����������(sh��)��Ӌ�������ŷ�늙C�������Д��r�̵��D(zhu��n)�١�
9.���(qu��n)��Ҫ��8�������ŷ�늙C�Č��r�D(zhu��n)�ٙz�yģ�K����������n ��2������m ��7��
���g(sh��)�I(l��ng)��
[0001] ���l(f��)���漰һ�N�D(zhu��n)�ٙz�yģ�K�������漰һ�N�����ŷ�ϵ�y(t��ng)���ŷ�늙C���r�D(zhu��n)��
�z�yģ�K��
�������g(sh��)
[0002] �ŷ�ϵ�y(t��ng)(servomechanism) ��ʹ���w��λ�á���λ����B(t��i)��ݔ���������܉���S
ݔ��Ŀ��(bi��o)(��o��ֵ) ������׃�����Ԅӿ���ϵ�y(t��ng)���ڬF(xi��n)���߾����ŷ�����ϵ�y(t��ng)�电(sh��)�ؙC
���������I�ϙC�ϣ�ͨ����������ʽ��늾��a������λ�Â���������늾��a����һ�N����
�W(xu��)���Cе����Ӟ�һ�w�Ĕ�(sh��)�ֻ��ǶȂ���������һ�㰲�b�ڙCе�O(sh��)������D(zhu��n)�S�ϻ���ͨ�^(li��n)
�S���c���D(zhu��n)�S�B�ӣ�ͨ�^����D(zhu��n)�Q�������D(zhu��n)�S�ĽǶ�λ�������r�D(zhu��n)�Q�锵(sh��)�ֻ����a�}�_����
��ݔ�oӋ��C�������c���a�����B�ӵĔ�(sh��)�ֿ����O(sh��)�䣬��C�ϵ�y(t��ng)���]�h(hu��n)�����ṩλ�÷�
����Ϣ�����H��ˣ��ڔ�(sh��)�ֿ���ϵ�y(t��ng)�У������D(zhu��n)�Sλ����Ϣ�c�r�g��Ϣ�Y(ji��)�ϣ�߀���Ԍ��ŷ�
늙C���D(zhu��n)���M�о��_�z�y�����ٶ��]�h(hu��n)����ϵ�y(t��ng)�ṩ�ٶȷ�����
[0003] �ڌ��H��(y��ng)���У����ڳɱ�ԭ������ֻ�ܲ��õ;��ȵľ��a�����鷴��������ͬ
�r���ֻ����\�㌢���ɱ���،�λ����Ϣ�а��������Ŵ�(d��o)��Ӌ������ٶȡ�����
�ȇ���ƫ�x�挍ֵ����늾��a���������^��������ĸ��N�`���̾�������ƫ�ĵȣ�����
���H��(y��ng)�Õr����(d��o)�¿���ϵ�y(t��ng)�xȡ��λ����Ϣ�Լ�����(y��ng)ӛ䛵ĕr�g��Ϣ�a(ch��n)��ƫ��M������
Ӱ��ٶȡ����ٶȜy���ľ��ȡ���һ���棬����ϵ�y(t��ng)���M���]�h(hu��n)�\��r����Ҫ�@�õ���늙C
�����D(zhu��n)�S���r��λ�á��ٶȡ����ٶ���Ϣ��Ȼ���ھ��a�����H�����r��늙C�����D(zhu��n)�S�D(zhu��n)�ٵ�
׃��������ݔ�����}�_�l�ʵ�����(y��ng)׃�������ɔ�(sh��)��ϵ�y(t��ng)�IJɘ�����ͨ���ǹ̶��ģ��ټ���
���a��ݔ���c��(sh��)��ϵ�y(t��ng)�IJɘӲ���ͬ����ϵ�y(t��ng)�@�õ�λ����Ϣ�Ϳ��ܕ���һ������ͨ
�^�ֻ����\�㣬�õ���Ҳ����늙C�����D(zhu��n)�S�^��ijһ�r�̵��D(zhu��n)�١��@һ�y���ϵĜ���
Ҳ��������ϵ�y(t��ng)�����ܮa(ch��n)��������Ӱ푡�
[0004] ���õ��D(zhu��n)�ٙz�y�������T��M����T����M/T��ֱ�Ӳ����˾��a��������λ����Ϣ�c
����ϵ�y(t��ng)�@�õĕr�g��Ϣ�M�в���\�㡣���ھ���(sh��)�١��`���ĵ;��Ⱦ��a�����@Щ������
�ľ��Ȳ�е��ڲ�ͬ�D(zhu��n)�ٗl���y��Ч�����ܴ��еĜy���ӕr�F(xi��n)����أ����y�ԝM��
�߾����ŷ�����ϵ�y(t��ng)��Ҫ�ʶ���Ҫ�O(sh��)Ӌ���m���D(zhu��n)�ٙz�y�ֶΣ��ԜpС�y���`������
��ϵ�y(t��ng)���D(zhu��n)�ٙz�y�Č��r푑�(y��ng)���ܡ�
[0005] ��ˣ����I(l��ng)��ļ��g(sh��)�ˆT�������_�l(f��)һ�N�ŷ�늙C�Č��r�D(zhu��n)�ٙz�yģ�K�����ŷ�
ϵ�y(t��ng)�Ќ��r�@���ŷ�늙C�Į�(d��ng)ǰ�D(zhu��n)�١�
�l(f��)����(n��i)��
[0006] ���b�ڬF(xi��n)�м��g(sh��)������ȱ�ݣ����l(f��)����Ҫ��Q�ļ��g(sh��)���}���ṩһ�N�ŷ�늙C��
���r�D(zhu��n)�ٙz�yģ�K��ͨ�^���ŷ�늙C���D(zhu��n)�Ǻ͕r�g�M�ж��ʽ�M�ϣ����rӋ��@���ŷ��
�C���D(zhu��n)�١�
[0007] �錍�F(xi��n)����Ŀ�ģ����l(f��)���ṩ��һ�N�ŷ�늙C�Č��r�D(zhu��n)�ٙz�yģ�K�����������ڣ�
|
�YӍ���������
�Ԓ��18801063276
qq̖��928221169
�Ԍ�id:�r����Ⱥ66
�Ԍ���䁣�http://zgbjdj.com/news2.asp?id=9440 |
�YӍ��������
�Ԓ��13521040277
qq̖��2539844470
�Ԍ�id:�r����Ⱥ888
�Ԍ���䁣�http://www.gfzfw.cn/bbs_read.asp?id=4220
|
| 

