ǰ�� ZM-6610M��һ������ֱ���oˢ����,�ٶ�/λ���]�h���� ,1-10A������{�� 9V-60V������늉�ݔ�룬�ӱ���߀���������,늙C�ԌW������,늙C�ྀ�ͻ�����̖�������S���, �г��ԌW������,�����λ�_�P,����һ�����x�� ���������\�У� �c���˶����ֿ����d�������f�� ��ȡ�a��l441 ZM-6610M ֱ���иПoˢ늙C�����������c
*֧��늉� 9V~60V���~��ݔ����� 10A *֧��ռ�ձ��{��(�{��)���D�ؿ���(����)���ٶ��]�h����(����)��λ���]�h����(�� �ȡ����x����)��N�{�ٷ�ʽ *֧���λ����ģ�M��̖��߉�ƽ���_�P����PWM���l�ʡ��}�_��RS485 ��Nݔ ����̖ *֧��ģ�M��̖늉����������c߉�ƽ늉����ã� ģ�M��̖��֧�� 0~3.3/5/10V �� 늉������� ߉�ƽ��֧�� 0/3.3/5/12/24V ��늉��� ֧��ģ�M��̖���Զ��{���c߉ �ƽ�ֵ���� *֧�� RS485 ���CͨӍ��֧�� MODBUS-RTU ͨӍ�f�h�������N������(�� PLC) ͨӍ���ƣ�֧��ͨӍ�Д�ͣ�C���o *֧�ּӜp�پ��_�r�g�c�Ӝp�ټ��ٶȿ��ƣ� ����ָ���г̃��ԄӼӜp�ٲ����_��λ *늙C��� PID �{�����ƣ�������ƾ��� 0.1A��****����/ؓ�d������Ƅ�(�x܇)� ���ɷքe���ã�֧��늙C�^�d�Ͷ��D��������ֹ�^���p��늙C *���ô��ʄx܇�����ṩ 6A ���m�x܇��� *֧��늙C����W���������e�`���o *֧��늙C�����D��λ������Ӄɂ���λ�_�P�քe�����D�ͷ��D��λ *֧��늙C�D�ٜy����֧��늙C���D�z�y/���D��λͣ�D *֧�ֹ��ψ� *18kHz �� PWM �l�ʣ�늙C�{�ٟo PWM �̽� *�OС�� PWM ���^���H 0.5us��PWM ��Ч���� 0.1%~**** *ȫ���ӿ� ESD ���o�����m�����s�ĬF���h�� *ʹ�� ARM Cortex-M3@72MHz ̎����
���g���� 


ԭ������ ������ʹ��****��늙C������_�z�y���g���иПoˢ늙C�Ԝy�١��иПoˢ늙C�D�� λ�Ùz�y���������������Ƅ�(��Q�x܇)���g�͏���� PID �{�����g��****�ؿ���늙Cƽ �������D���Q���Ƅӣ�ݔ��������r�{�ط�ֹ�^�������ʿ���늙C�D�ٺ��D��λ�ã�늙C 푑��r�g���ҷ��_��С�� 1.3.1 늙C�Ӝp�ٿ��� ����Ԅ��{�������ٶ��Ԅӿ��Ƶ�ܛ���ӷ�ʽ��늙C��Ѹ�١�ƽ�����Ӷ����_��С��֧ �ּӜp�ٕr�g�ͼӜp�ټ��ٶ����á� 1.3.2 늙C�Ƅ�(�x܇)���� ����Ԅ��{�����ܺ��Ƅӷ�ʽ��늙C�Ƅӕr�g�̶��o���ҵě_�����ӡ�֧���Ƅ������ �á� 1.3.3 늙C�Q����� 늙C�����D�ГQ���^���������Ȳ����ƣ��Ԅ��M�Мp�١�ܛ�Ƅӡ�ܛ���ӿ��ƣ��oՓ �Q����̖��׃��ô�l�������������������늙C�p�ġ� 1.3.4 늙C���ٿ��� ͨ�^������̖�z�y�D�ٺ��D��λ�ã�ʹ�� PID �{���㷨�M���]�h���ƣ�֧���ٶ��]�h ���ƺ͕r�g-λ���]�h���ƃɷN���ٿ����㷨���ٶ��]�h��ʽ�����ڸ��ٕr���ʿ���ƽ���� ���{С�����c�����ڵ��ٕr�{�����ٶȿ��Ʋ�ƽ�����r�g-λ���]�h���Ʒ�ʽ�m���ڶ��_� �������ƶ���늙C����ͬ�r�g���D����ͬ�ĽǶȵĿ���Ҫ��Ҳ�m���ڳ����ٿ��ơ� 1.3.5 늙Cλ�ÿ��� ͨ�^������̖�z�y�D��λ�ã�ʹ�� PID �{���㷨�M��λ���]�h���ƣ�ʹ�Äx܇����M �Мp�١� 1.3.6 늙C�D�ؿ��� ����늙C�D���c�����С����Ƶľ����Pϵ��������ʹ�÷���ݔ�����Ʒ�ʽ�팍�F� �C�D�ؿ��ƣ��Ñ�ͨ�^�{��ݔ������Ĵ�С�팍�F��늙C�D�ش�С�Ŀ��ơ� 1.3.7 늙C�^�d�Ͷ��D���o 늙C�^�d�r������������ݔ������Ч�ر��o늙C��늙C���D�r�������əz�yԓ�� �B����늙C�Ƅӡ� 1.3.8 �Ȳ��ɔ_���� ���˱��C늙C��·����y���ľ��ȣ����·�c�����·�gͨ�^�ɔ_˥�p�����ġ�˲�B �ɔ_���Ʒ�ʽ��ϣ�����Ч���C�����·�������·�ɔ_��Ӱ푡� 1.3.9 �ⲿ�ɔ_���� ʹ�� ESD ���o�������o�й���·�팦ȫ���ӿ��M�� ESD ���o���Եֿ��ⲿ�ɔ_�Ķ� ʹ�Ȳ��·���������ͱ��o�Ȳ������������ڽӿ��ϵ�˲�B�߉��o늓�ġ� 1.3.10 485 ͨӍ�ɔ_���� ʹ����̖���Դ���xоƬ�� 485 �հl�·�M�и��x�Ķ����Ƹɔ_��
������v��͵��@����Ŷ��������^�m�v�����aƷ���Լ����ྎ��֪�R�����dȤ�����ѿ�����늻�����·����S�a�����ź�����ҪԔ���Y��Ŷ����
ϵ�ˣ���� ϵ��ʽ��17600500753��ͬ�� QQ�� 
���_�֙C�Ԍ���һ���Pע��� 
���_�֙C�Œ�һ�����Ӻ���
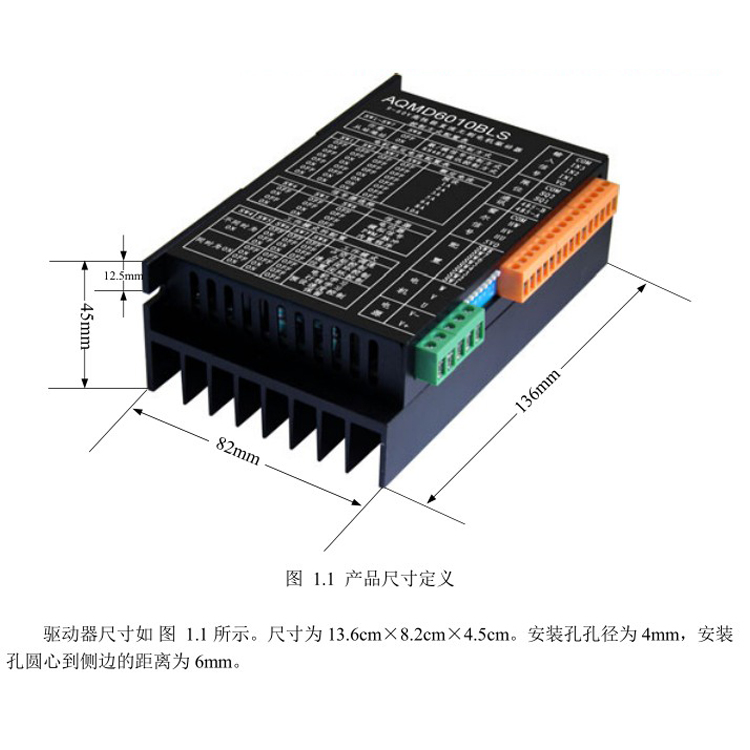
|


