һ���ŷ�늙C���D(zhu��n)ԭ��
�ڽ�B�ŷ�늙C���D(zhu��n)ԭ��֮ǰ���҂��ȁ��˽�һ���ŷ�늙C�Ļ�������ԭ�����ŷ�늙C��늙C�����a���������������ֽM�ɡ�늙Cؓ؟(z��)�ṩ���������a�����ڜy���D(zhu��n)�ӵ�λ����Ϣ������������(j��)���a����������̖���F(xi��n)��늙C�Ŀ��ơ��ŷ�늙C�����D(zhu��n)�ͷ��D(zhu��n)ͨ�^��׃����ķ���팍�F(xi��n)��
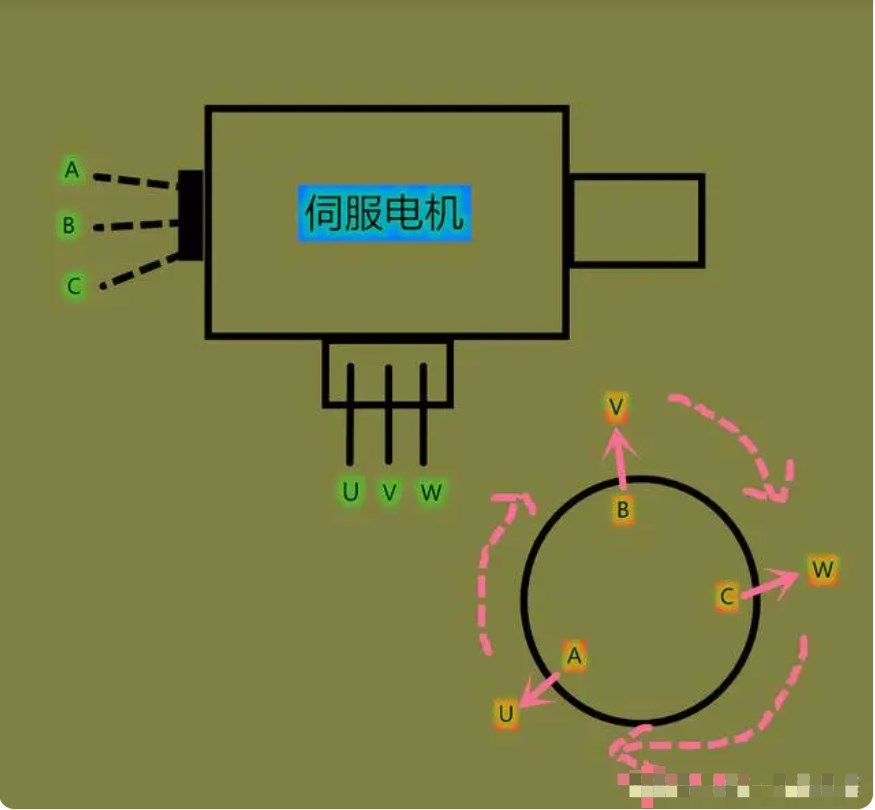
�ŷ�늙C���õľ��a��ͨ��������ʽ���a��������ʽ���a��ͨ�^��·������̖A��B��y���D(zhu��n)�ӵĽǶȡ�����(j��)A��B�ɂ���̖�����ں���λ����Դ_���D(zhu��n)�ӵĽǶȺ��D(zhu��n)�١���(d��ng)늙C̎�����D(zhu��n)��B(t��i)�r��A��̖�����ȳ��F(xi��n)��Ȼ��B��̖���F(xi��n)����(d��ng)늙C̎�ڷ��D(zhu��n)��B(t��i)�r��B��̖�����ȳ��F(xi��n)��Ȼ��A��̖���F(xi��n)������������(j��)���a����̖��׃�����Д�늙C�\�ӵķ�����׃����ķ���?q��)��F(xi��n)�����D(zhu��n)��
�����ŷ�늙C�����{(di��o)������
�ŷ�늙C�������{(di��o)��ָ���Ǹ�׃���a����A��B��̖�ĘO�ԣ����{(di��o)��늙C�������D(zhu��n)���������B�ɷN��Ҋ�������{(di��o)��������
1. ܛ���O(sh��)��
�F(xi��n)�����ŷ�늙C������ͨ�����߂�ܛ�����ù��ܣ�����ͨ�^�Ŀ�����������(sh��)�팍�F(xi��n)�����{(di��o)����ͨ����늙C���ý����(sh��)�O(sh��)�ý��棬�����ҵ������{(di��o)���x헡��Ñ�����ͨ�^��������O(sh��)�Á팍�F(xi��n)늙C�������D(zhu��n)��
�����{(di��o)���ľ��w���Eһ�����£�
- �B���ŷ�늙C�Ϳ��������_��ͨ��������
- �M��늙C���ý����(sh��)�O(sh��)�ý��档
- �ҵ������{(di��o)���x헣�������(j��)��Ҫ�x�����D(zhu��n)���D(zhu��n)��
- �������ò�������늙C��
��ͬ���ŷ�늙C�������O(sh��)�ý�����ܕ�������ͬ�����w����Ո�������P(gu��n)���Ñ��փԻ��g(sh��)�ęn��
2. ��̖���{(di��o)�Q
��һ�N�����{(di��o)���ķ�����ͨ�^�{(di��o)�Q���a��A��B��̖�����B�ӷ�ʽ�팍�F(xi��n)��ͨ�^�{(di��o)�Q��̖�����B�ӣ����Ը�׃A��B��̖����λ��Ķ��{(di��o)��늙C�������D(zhu��n)����
�����{(di��o)���ľ��w���E���£�
- ��늙C�Ϳ��������_�Դ���_����ȫ��
- �ҵ��ŷ�늙C�Ϳ������ľ��a����̖����
- �{(di��o)�QA��B��̖�����B�ӷ�ʽ���猢A��̖���B�ӵ�ԭ����B��̖�˿�����B��̖���B�ӵ�ԭ����A��̖�˿ڡ�
- �_���B�ӷ�(w��n)�̺�����ͨ�ʹ�{(di��o)�Q�����̖����Ч��
��Ҫע����ǣ���̖���{(di��o)�Q������Ҫ�M�Ќ������������������f�����L(f��ng)�U�^����Ҫ����֔(j��n)�����ڲ���֮ǰ��(w��)���P(gu��n)�]�Դ���_����ȫ��
�Y(ji��)Փ��
�ŷ�늙C�������D(zhu��n)��ͨ�^��׃�������팍�F(xi��n)�ġ������I(y��)�Ԅӻ��͙C�����I(l��ng)�������D(zhu��n)���ܽ�(j��ng)������(y��ng)�õ����H�����С������{(di��o)���nj��F(xi��n)�ŷ�늙C�����D(zhu��n)��һ�N��Ҋ����������ͨ�^ܛ���O(sh��)�û���̖���{(di��o)�Q�팍�F(xi��n)������(j��)���H����;��w��������֧�֣��x������(y��ng)�ķ������Ɍ��F(xi��n)늙C�������D(zhu��n)���ܡ� (li��n)ϵ��ʽ��15237077273��̖ͬ��κ���� |


