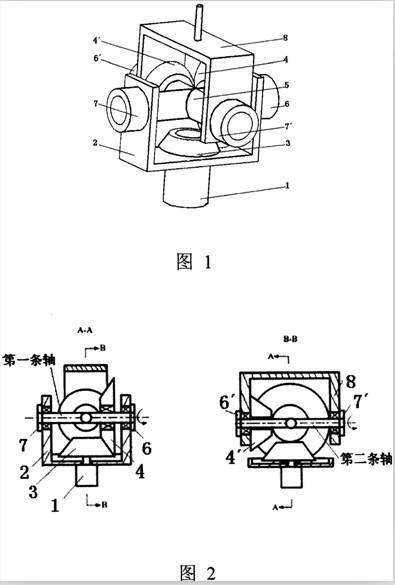
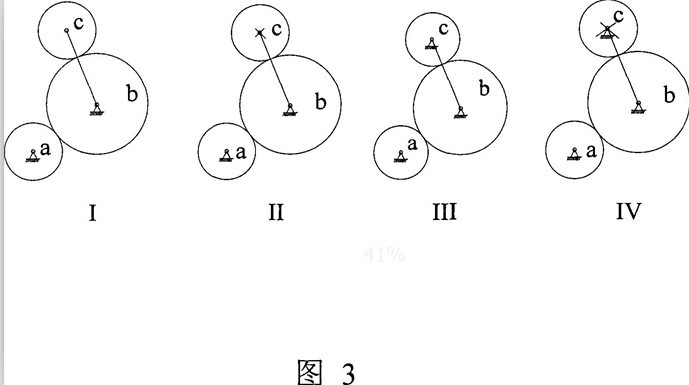
���l�����_��һ�N��늙C�ӵă����ɶ��P���Y����ԓ�Y����늙C(1)���C��(2)��늙C�X݆(3)����һ�X݆(4)���ڶ��X݆(4��)��ʮ���ν����S(5)����һ��λ�Ƃ�����(6)���ڶ���λ�Ƃ�����(6��)����һ����׃�w������(7)���ڶ�����׃�w������(7��)�͈��в���(8)���ɡ� ���ñ��l����ͨ�^���ɂ��S�˿ɿش���׃�w������ݔ���������صĿ��ƣ����F�ˆ�늙C���ɂ����ɶ��\�ӵĿ��ơ� 1��һ�N��늙C�ӵă����ɶ��P���Y�������������ڣ�ԓ�Y����늙C(1)���C��(2)��늙C�X݆(3)����һ�X݆(4)���ڶ��X݆(4��)��ʮ���ν����S(5)����һ��λ�Ƃ�����(6)���ڶ���λ�Ƃ�����(6��)����һ����׃�w������(7)���ڶ�����׃�w������(7��)�͈��в���(8)���ɣ����У��C��(2)�c���в���(8)ͨ�^ʮ���ν����S(5)���ӣ��C��(2)�cԓʮ���ν����S(5)�ĵ�һ�l�Sͨ�^�S�����ӣ����в���(8)�cԓʮ���ν����S(5)�ĵڶ��l�Sͨ�^�S�����ӣ�늙C(1)�̶����b�ڙC��(2)�ϣ�늙C�X݆(3)�c늙C(1)��ݔ���D�S�̶��ӣ�늙C�X݆(3)����ƽ��ƽ��������ʮ���ν����S(5)�ĵ�һ�l�S��늙C�X݆(3)���S�����L��ͨ�^ʮ���ν����S(5)�������c����һ�X݆(4)�c����ʮ���ν����S(5)�ĵ�һ�l�S���S�����ӣ��ڶ��X݆(4��)�c�������в���(8)��̶��ӣ�ʹ늙C�X݆(3)�c��һ�X݆(4)�����ϣ��ҵ�һ�X݆(4)�c�ڶ��X݆(4��)�����ϣ�����ʮ���ν����S(5)�ĵ�һ�l�S�ăɶ˷քe���b�е�һ��λ�Ƃ�����(6)�͵�һ����׃�w������(7)������ʮ���ν����S(5)�ĵڶ��l�S�ăɶ˷քe���b�еڶ���λ�Ƃ�����(6��)�͵ڶ�����׃�w������(7��)�� 2����������Ҫ��1�����Ć�늙C�ӵă����ɶ��P���Y�������������ڣ�������һ�X݆(4)�cʮ���ν����S(5)���S�з�ʽ���ӣ�ԓ�����ɶ��P���@��һ�S����ݔ���\�Ӳ���ͬ�ڵ�һ�X݆(4)�@ʮ���ν����S(5)��һ�l�S���\�ӡ� 3����������Ҫ��1�����Ć�늙C�ӵă����ɶ��P���Y�������������ڣ������ڶ��X݆(4��)�c���в���(8)��̶��ӣ�ԓ�����ɶ��P���@�ڶ��S����ݔ���\����ͬ�ڵڶ��X݆(4��)�@ʮ���ν����S�ڶ��l�S���\�ӡ� 4����������Ҫ��1�����Ć�늙C�ӵă����ɶ��P���Y�������� �����ڣ�������һ��λ�Ƃ�����(6)���ڷ�ӳԓ�����ɶ��P���@��һ�S�����D�ǣ������ڶ���λ�Ƃ�����(6��)���ڷ�ӳԓ�����ɶ��P���@�ڶ��S�����D�ǣ���λ�Ƃ�����(6)��(6��)���ڌ������ɶ��P���\�ӵķ������ơ� 5����������Ҫ��1�����Ć�늙C�ӵă����ɶ��P���Y�������������ڣ�������һ����׃�������̶����������C��(2)�ϣ������ڶ�����׃�������̶����ڈ��в���(8)�ϣ�ͨ�^���ɂ��S��������ݔ������Ŀ��ƣ����F��늙C���ɂ����ɶȵĿɿ��ӡ� 6����������Ҫ��l�����Ć�늙C�ӵă����ɶ��P���Y�������������ڣ��������в���(8)�@����ʮ���ν����S(5)�ăɗl�S����ֱ�����\�����@���γɵģ����в���(8)���ڶ��X݆(4��)�Լ�ʮ���ν����S(5)���w�@��һ�S���D�ӣ����в���(8)�͵ڶ��X݆(4��)�@�ڶ��S���D�ӡ� ��늙C�ӵă����ɶ��P���Y�����g�I�l���漰�����C���˼��g�I�������漰һ�N�����ڷ����C���˵Ć�늙C�ӵă����ɶ��P���Y���� �������g�����ɶ��P��ָ���Ѓɂ��S����ֱ�ཻ���ɶȵ��P�����@�N�P����ԭ�������w�̈́����w���ձ���ڣ����ƃ����ɶ��P�������N�����C���˾���һ�������x�� ����Ȼ�磬����2��3���S����ֱ�ཻ���ɶȵ��P���ڸ��N�����w�ϘO�鳣Ҋ���������w���������������i�P�������P�������P����ָ���P�������P�����з���������������ȸ��P���ȡ���ˣ����ڸ��N�����C���ˣ�������������S���ཻ���ɶȵ��P������Ҫ��Q�Ć��}֮һ�� һ����r�£�2��3���ɶ��P�����Ӷ��Dz��õ�ȫ�ӷ�ʽ������늙C���c�P�������ɶȔ�����ȵģ��@�ӳ������o늙C�IJ��Î����韩������܌��F��늙C�ӵă����ɶ��P��������һ���̶��Ϸ���C���˵��OӋ�� �l������(һ)Ҫ��Q�ļ��g���}���b�ڴˣ����l������ҪĿ�������ṩһ�N��늙C�ӵă����ɶ��P���Y�����Ԍ��F��늙C���ɂ����ɶ��\�ӵĿ��ơ� (��)���g�������_������Ŀ�ģ����l���ṩ��һ�N��늙C�ӵă����ɶ��P���Y����ԓ�Y����늙C1���C��2��늙C�X݆3����һ�X݆4���ڶ��X݆4���� ʮ���ν����S5����һ��λ�Ƃ�����6���ڶ���λ�Ƃ�����6������һ����׃�w������7���ڶ�����׃�w������7���͈��в���8���ɣ����У��C��(2)�c���в���(8)ͨ�^ʮ���ν����S(5)���ӣ��C��(2)�cԓʮ���ν����S(5)�ĵ�һ�l�Sͨ�^�S�����ӣ����в���(8)�cԓʮ���ν����S(5)�ĵڶ��l�SҲͨ�^�S�����ӣ�늙C(1)�̶����b�ڙC��(2)�ϣ�늙C�X݆(3)�c늙C(1)��ݔ���D�S�̶��ӣ�ԓ늙C�X݆(3)����ƽ��ƽ��������ʮ���ν����S(5)�ĵ�һ�l�S��늙C�X݆(3)���S�����L��ͨ�^ʮ���ν����S(5)�������c����һ�X݆(4)�c����ʮ���ν����S(5)�ĵ�һ�l�S���S�����ӣ��ڶ��X݆(4��)�c�������в���(8)��̶��ӣ�ʹ늙C�X݆(3)�c��һ�X݆(4)�����ϣ��ҵ�һ�X݆(4)�c�ڶ��X݆(4��)�����ϣ�����ʮ���ν����S(5)�ĵ�һ�l�S�ăɶ˷քe���b�е�һ��λ�Ƃ�����(6)�͵�һ����׃�w������(7)������ʮ���ν����S(5)�ĵڶ��l�S�ăɶ˷քe���b�еڶ���λ�Ƃ�����(6��)�͵ڶ�����׃�w������(7��)�� ���x�أ�������һ�X݆(4)�cʮ���ν����S(5)���S�з�ʽ���ӣ�ԓ�����ɶ��P���@��һ�S����ݔ���\�Ӳ���ͬ�ڵ�һ�X݆(4)�@ʮ���ν����S(5)��һ�l�S���\�ӡ� ���x�أ������ڶ��X݆(4��)�c���в���(8)��̶��ӣ�ԓ�����ɶ��P���@�ڶ��S����ݔ���\����ͬ�ڵڶ��X݆(4��)�@ʮ���ν����S�ڶ��l�S���\�ӡ� ���x�أ�������һ��λ�Ƃ�����(6)���ڷ�ӳԓ�����ɶ��P���@��һ�S�����D�ǣ������ڶ���λ�Ƃ�����(6��)���ڷ�ӳԓ�����ɶ��P���@�ڶ��S�����D�ǣ���λ�Ƃ�����(6)��(6��)���ڌ������ɶ��P���\�ӵķ������ơ� ���x�أ�������һ����׃�������̶����������C��2�ϣ������ڶ�����׃�������̶����ڈ��в���8�ϣ�ͨ�^���ɂ��S��������ݔ������Ŀ��ƣ����F��늙C���ɂ����ɶȵĿɿ��ӡ� ���x�أ��������в���8�@����ʮ���ν����S5�ăɗl�S����ֱ �����\�����@���γɵģ����в���8���ڶ��X݆4���Լ�ʮ���ν����S5���w�@��һ�S���D�ӣ����в���8�͵ڶ��X݆4���@�ڶ��S���D�ӡ� (��)����Ч�����������g�������Կ��������l��������������Ч���� 1�����l���ṩ���@�N��늙C�ӵă����ɶ��P���Y����ͨ�^���ɂ��S�˴���׃������ݔ���������صĿ��ƣ����F�ˆ�늙C���ɂ����ɶ��\�ӵĿ��ơ� 2�����l���ṩ���@�N��늙C�ӵă����ɶ��P���Y������1��늙Cͨ�^�F�X݆ϵ��2�����ɶȣ��P����ݔ�����������ɶȔ�Ŀ������Ƿ��ϵ�y������һ���̶������늙C����Ч�ʡ� ���D�f���D1�鱾�l���ṩ�Ć�늙C�ӵă����ɶ��P���ĽY��ʾ��D���D2�鱾�l���ṩ�Ć�늙C�ӵă����ɶ��P����ԭ��D���D3�鱾�l���ṩ�Ć�늙C�ӵă����ɶ��P���ķN��Ч������B��ʾ��D���D1�͈D2�У�1��늙C��2��C�ܣ�3��늙C�X݆��4���һ�X݆��4����ڶ��X݆��5��ʮ���ν����S��6���һ��λ�Ƃ�������6����ڶ���λ�Ƃ�������7���һ����׃�w��������7����ڶ�����׃�w��������8����в����� ���w��ʩ��ʽ��ʹ���l����Ŀ�ġ����g�����̓��c����������ף����½Y�Ͼ��w��ʩ���������ո��D�������l���Mһ��Ԕ���f���� ��D1��ʾ���D1�鱾�l���ṩ�Ć�늙C�ӵă����ɶ��P���ĽY��ʾ��D��ԓ�Y����늙C1���C��2��늙C�X݆3����һ�X݆4���ڶ��X݆4����ʮ���ν����S5����һ��λ�Ƃ�����6���ڶ���λ�Ƃ�����6������һ����׃�w������7���ڶ�����׃�w������7���͈��в���8���ɡ� ���У��C��2�c���в���8ͨ�^ʮ���ν����S5���ӣ��C��2 �cԓʮ���ν����S5�ĵ�һ�l�Sͨ�^�S�����ӣ����в���8�cԓʮ���ν����S5�ĵڶ��l�SҲͨ�^�S�����ӣ�늙C1�̶����b�ڙC��2�ϣ�늙C�X݆3�c늙C1��ݔ���D�S�̶��ӣ�ԓ늙C�X݆3����ƽ��ƽ��������ʮ���ν����S5�ĵ�һ�l�S��늙C�X݆3���S�����L��ͨ�^ʮ���ν����S5�������c����һ�X݆4�c����ʮ���ν����S5�ĵ�һ�l�S���S�����ӣ��ڶ��X݆4���c�������в���8��̶��ӣ�ʹ늙C�X݆3�c��һ�X݆4�����ϣ��ҵ�һ�X݆4�c�ڶ��X݆4�������ϣ�����ʮ���ν����S5�ĵ�һ�l�S�ăɶ˷քe���b�е�һ��λ�Ƃ�����6�͵�һ����׃�w������7������ʮ���ν����S5�ĵڶ��l�S�ăɶ˷քe���b�еڶ���λ�Ƃ�����6���͵ڶ�����׃�w������7���� ������һ�X݆4�cʮ���ν����S5���S�з�ʽ���ӣ���ԓ�����ɶ��P���@��һ�S����ݔ���\�Ӳ���ͬ�ڵ�һ�X݆4�@ʮ���ν����S5��һ�l�S���\�ӡ� �����ڶ��X݆4���c���в���8��̶��ӣ���ԓ�����ɶ��P���@�ڶ��S����ݔ���\����ͬ�ڵڶ��X݆4���@ʮ���ν����S�ڶ��l�S���\�ӡ� ������һ��λ�Ƃ�����6���ڷ�ӳԓ�����ɶ��P���@��һ�S�����D�ǣ������ڶ���λ�Ƃ�����6�����ڷ�ӳԓ�����ɶ��P���@�ڶ��S�����D�ǣ���λ�Ƃ�����6��6�����ڌ������ɶ��P���\�ӵķ������ơ� ������һ����׃�������̶����������C��2�ϣ������ڶ�����׃�������̶����ڈ��в���8�ϣ�ͨ�^���ɂ��S��������ݔ������Ŀ��ƣ����F��늙C���ɂ����ɶȵĿɿ��ӡ� �������в���8�@����ʮ���ν����S5�ăɗl�S����ֱ�����\�����@���γɵģ����в���8���ڶ��X݆4���Լ�ʮ���ν����S5���w�@��һ�S���D�ӣ����в���8�͵ڶ��X݆4���@�ڶ��S���D�ӡ� ��늙C�ӵă����ɶ��P����ԭ���OӋ��D2��ʾ���D2�鱾�l���ṩ�Ć�늙C�ӵă����ɶ��P����ԭ��D���C���c���в���ͨ�^ʮ���ν����S���ӡ�ʮ���ν����S�ăɂ���ֱ�ཻ�S�քe���һ�l �S���ڶ��l�S����һ�l�S���ڶ��l�S�քe���S�а��b�ڙC�͈ܺ��в����ϡ�늙C�̶����b�ڙC���ϣ���һ�X݆�t���S���c��һ�l�S���ӣ�늙C�X݆�c��һ�X݆�Ђ�����ϣ����O���ӱȞ�fln���ڶ��X݆�c���в�����һ�w����һ�X݆���ڶ��X݆֮�g���Ђ�����ϣ����O���ӱȞ�k�� ��һ�l�S���ڶ��l�S���Ѓɂ��S�ˣ��քe���b�н�λ�Ƃ������ʹ���׃�w����������һ��λ�Ƃ�������ӳ����ʮ���ν����S�@��һ�l�S���D�ǣ��ڶ���λ�Ƃ�������ӳ���в����@�ڶ��l�S���D�ǣ���һ�������͵ڶ��������քe���ڙC�͈ܺ��в����ϡ�ͨ�^���ɂ��S��������ݔ������Ŀ��ƣ����F��늙C���ɂ����ɶȵĿɿ��ӡ��@�ӣ����в����@��һ�l�S���ڶ��l�S���\�����@���γɵģ����в����c�ڶ��X݆��ʮ���ν����S���w�@��һ�l�S���D�ӣ����в����c�ڶ��X݆�@�ڶ��l�S���D�ӡ� ��늙C�ӵă����ɶ��P����ԭ���Ͽ��Ե�Ч����D3��ʾ����݆ϵ���D3�鱾�l���ṩ�Ć�늙C�ӵă����ɶ��P���ķN��Ч������B��ʾ��D��늙C�X݆��Ч���X݆a���c�C�ܘ����D�ӷ�����һ�X݆��Ч���X݆b���c�C�ܘ����D�ӷ����ڶ��X݆���c��̶��ӵĈ��в�����Ч���X݆c��ʮ�ֽ����S��Ч��ϵ�U���ɶ˷քe�c�X݆b��c�����D�ӷ�����Ч�C���ăɂ����ɶ��\�ӷքe��ϵ�U���X݆cݔ���� ��D3(I)����ԭ�P���ăɂ�����������ȫ���ɕr���ஔ��ϵ�U���X݆c�������\�ӣ����\�ӂ��f�Pϵ���_���� ��D3(II)������һ���������ɣ��ڶ��������Ƅӕr���ஔ�ڌ�ϵ�U�c�X݆�̶��������� ��D3(III)�����ڶ����������ɣ���һ�������Ƅӕr���ஔ�X݆c�c�C�ܘ����D�ӷ��� ��D3(IV)������һ��������2���Ƅӕr���C�������i�������� �f������6��6��\�ӡ� ��Ҋ�ڃɂ��������е�����һ����ȫ�Ƅӵ���r�£�ϵ�y���\��ݔ�������Ǵ_���ģ���ijһ�����ɶȪ���ݔ���\�ӡ�������ɂ�������ͬ�r�M���������ؿ��ƣ����Ԍ��F�ɂ����ɶȵ�ͬ�r�\�ӣ����C�P���D�������ⷽ���\�ӵ��B�m�� ���������ľ��w��ʩ���������l����Ŀ�ġ����g����������Ч���M�����Mһ��Ԕ���f��������������ǣ����������H�鱾�l���ľ��w��ʩ�����ѣ������������Ʊ��l�������ڱ��l���ľ����ԭ�t֮�ȣ��������κ��ġ���ͬ��Q�����M�ȣ����������ڱ��l���ı��o����֮�ȡ�