һ������
ͨ�ßoˢ늙C(j��)�(q��)��(d��ng)���Ǖr(sh��)����Ⱥ����ϬF(xi��n)�������I(y��)�Ԅ�(d��ng)�����I(l��ng)��������аl(f��)�Ĵ����(q��)��(d��ng)������Ҫ���Ç��H****늙C(j��)���Ô�(sh��)��̎����DSP ��������Ը��ٶȔ�(sh��)��߉оƬ��Ʒ�|(zh��)����ģ�K���M�ɾ��м��ɶȸߡ��w�eС�����o(h��)���ơ��Ӿ��������ˡ��ɿ��Ըߵ�һϵ�Ѓ�(y��u)�c(di��n)��ԓ�(q��)��(d��ng)�����ṩ����������ٶ��O(sh��)�����ⲿģ�M늉��{(di��o)�١��ⲿ�λ���{(di��o)�٣��}���{(di��o)�ٵȹ��ܡ����ø��ٺ��Ŀ��Ʋ������ƣ����в�����ȫ�����Ʋ������ʲ���ȫ���x�����{(di��o)�ٷ�ʽ�`����ӡ��D(zhu��n)�ټ��r(sh��)�@ʾ�����o(h��)�����Rȫ�����ʲ����ṩӲ�����o(h��)�����c(di��n)��
�����a(ch��n)Ʒ����
|
1. ϵ�y(t��ng)���ԣ�
ݔ���Դ AC180/250VAC 50/60Hz |
|
�B�m(x��)ݔ�����: 4.9A���m��1200W���µğoˢ늙C(j��) |
|
****ݔ�����: 9.9A,
ʹ�Üض� 0~+45��C
����ض� -20~+85��C
ʹ�ü������� <85% [���Y(ji��)˪�l��]
��(g��u)�� �ڒ����wʽ |
|
2. ��������
��s��ʽ �� ɢ������ʽ
������ݔ��ݔ����̖(h��o) ��ȫ���x
�� �o(h��) �C(j��) �ܣ� �^������^���^�ٶ��^늉�Ƿ�������Դ����
�� �� �� �� ��6λLED �@ʾ 4 λ���I���� |
*�\(y��n)�����g��(y��n)�����_�⚤�y(c��)�����|���װ����κ������ͽӲ����
*��늺�1��犺�����M(j��n)�еװ�z�����Q���U(xi��n)�ܡ�
*�\(y��n)�����g��(y��n)���(q��)��(d��ng)���o�⚤�\(y��n)�С�
*�oˢ늙C(j��)�(q��)��(d��ng)���͟oˢ늙C(j��)�����ÿɿ��ӵ�,��t�п��ܟoˢ늙C(j��)�D(zhu��n)�ٲ�ƽ��(w��n)��
|
��������
��Ⱥ�a(ch��n)Ʒ�ı��������ڮa(ch��n)Ʒ��������ˇ����һ���ԣ���
�r(sh��)����Ⱥ�����C��a(ch��n)Ʒ���m�Ͽ͑��ľ��w��;����?y��n)��Ƿ��m��߀�cԓ��;��
���g(sh��)ָ��(bi��o)Ҫ���ʹ�×l�����h(hu��n)�����P(gu��n)������˾�����h���ˮa(ch��n)Ʒ�����R���t(y��)����
;��
|
|
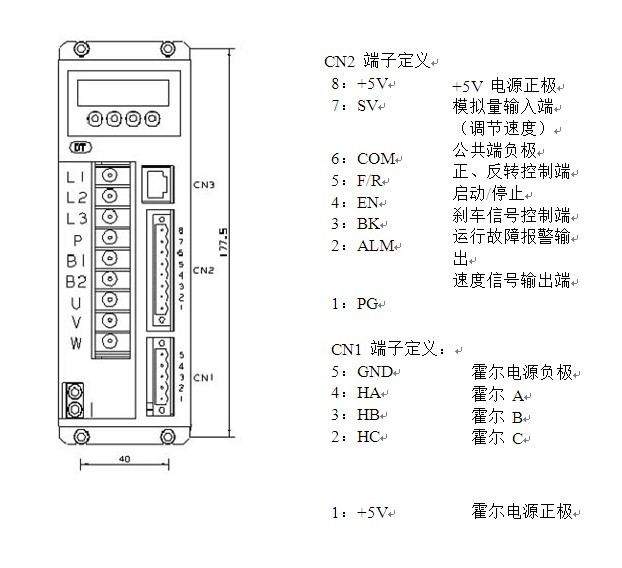
2.1 �Դ���Ӻ�늙C(j��)����
|
����̖(h��o) |
���ӷ�̖(h��o) |
��̖(h��o)���Q |
���� |
|
1 |
L1(L)(R) |
����·�Դݔ��
|
����·�Դݔ����� AC220V 50Hz����(d��ng)ʹ�Æ���220V �r(sh��)��(y��ng)�� L1 �� L2�� |
|
2 |
L2(N)(S) |
|
3 |
L3(T) |
|
4 |
P
|
�߉�ֱ��ĸ������
|
�(q��)��(d��ng)����(n��i)��ֱ��ĸ�����ˣ��~��늉� 315V |
|
5 |
B1
|
��(n��i)���Ƅ�(d��ng)���
|
��(d��ng)ʹ�Ã�(n��i)���Ƅ�(d��ng)���r(sh��)���̽� B1��B2����(d��ng)��(n��i)����
��(d��ng)��蹦�ʲ�����Ҫʹ���ⲿ�Ƅ�(d��ng)���r(sh��)�����_
B1��B2,���ⲿ�Ƅ�(d��ng)������ P��B2��
|
|
6 |
B2
|
�ⲿ�Ƅ�(d��ng)���
|
|
7 |
U(MA) |
늙C(j��)ݔ��
|
늙C(j��)ݔ�����ӱ���c늙C(j��) U��V��W ����һһ��(du��)��(y��ng)��ע�⣺�������{(di��o)�Q������ӵķ�����ʹ늙C(j��)���D(zhu��n)���@һ�c(di��n)�c����늄�(d��ng)�C(j��)��ȫ��ͬ�� |
|
8 |
V(MB) |
|
9 |
W(MC) |
|
|
PE |
���o(h��)��
|
�ṩ늙C(j��)���(q��)��(d��ng)��©����İ�ȫй��ͨ·
| |
|
�(q��)��(d��ng)���ߴ磺�L 180*�� 75*�� 140 |
|
�@���օ���(sh��)�����O(sh��)��ijЩ���õĿ͑����ƹ��ܣ�ͨ�������Ñ������{(di��o)��(ji��)��ˇ����(sh��)֮�á��@���ֵą���(sh��)�c�(q��)��(d��ng)���Ļ������ܟo�P(gu��n)�����ڑ�(y��ng)�Ì���Ĺ��܅���(sh��)��������(hu��)�S���Ñ��ľ��w����Ҫ��������{(di��o)����
|
����(sh��)���Q |
����(sh��)��̖(h��o) |
�O(sh��)����(sh��)ֵ���� |
���SĬ�J(r��n)ֵ |
�����f�� |
|
�x���@ʾ��(n��i)�� |
P1��0 |
0~9 |
0 |
0 �@ʾ��(d��ng)ǰ늙C(j��)��(sh��)�H�ٶ�
1 �@ʾֱ��ĸ��늉�
2 �@ʾ�ⲿģ�M��ݔ��ֵ
3 �@ʾ늙C(j��)���
4 �@ʾ��(n��i)��Ҏ(gu��)���ٶ�
5 U �����
6 V �����
7 W �����
8 ռ�ձ�
9 ���� |
|
��(n��i)���\(y��n)���D(zhu��n)�� |
P1��1 |
0~9999 |
2000 |
��(d��ng)�x����(n��i)���ٶ��ǣ���ԓ����(sh��)�Q��늙C(j��)�\(y��n)���ٶȡ���Ҋ P1��2 |
|
�x���ٶ���̖(h��o)��Դ |
P1��2
|
0~2
|
1
|
0����(n��i)��ָ���ٶ�(tP1[0]���(n��i)���ٶȣ�
늙C(j��)�\(y��n)��(d��ng)�r(sh��) MUP,MDOWN �I�Ӝp��)
1���ⲿ�˿�ģ�Mݔ�룬ʹ�� CN2 ��
�����_ SV ��̖(h��o)����늙C(j��)�ٶȡ�
2��ͨӍָ����� |
|
�����O(sh��)�� |
P1��3
|
0~1
|
0
|
0�����D(zhu��n)
1�����D(zhu��n) |
|
�x��ͣ��̖(h��o)��Դ |
P1��4
|
0~2
|
1
|
0�����I�ք�(d��ng)���ƣ�ENT �I��ͣ��SET
�I���D(zhu��n)늙C(j��)�\(y��n)��(d��ng)����+/-�I���ڼ���
�͜p�٣�
1���ⲿ�˿ڿ��ƣ�ʹ�� CN2 �ĵ� 4
�_��̖(h��o)���چ���(d��ng)��ֹͣ늙C(j��)
2��ͨӍָ����� |
|
늙C(j��)�O��(du��)��(sh��) |
P1��5 |
0~99 |
2 |
늙C(j��)�O��(du��)��(sh��)��ע�⣺늙C(j��)�O��(du��)��(sh��)=늙C(j��)�O��(sh��)/2 |
|
�(q��)��(d��ng)����ַ |
P1��6 |
0~255 |
0 |
ʹ��ͨӍ����늙C(j��)�r(sh��)�(q��)��(d��ng)���ĵ�ַ |
|
�ٶȱ������� |
P1��7 |
0~99999 |
1520 |
���� PID �ٶȿ����еı������� KP |
|
�ٶȷe������ |
P1��8 |
0~99999 |
320 |
���� PID �ٶȿ����еķe������ KI |
|
늙C(j��)���ٶ� |
P1��9 |
1~60000 |
6000 |
ԓ����(sh��)�ͼ��ٶȳ����ȣ��@�õ�늙C(j��)
��(sh��)�H���ٶȺ�ؓ(f��)�d��늙C(j��)����r��
�P(gu��n)�� |
|
늙C(j��)�p�ٶ� |
P1��10 |
1~60000 |
6000 |
|
늙C(j��)�~���ٶ��O(sh��)�� |
P1��11
|
0~99999
|
3000
|
��λ�D(zhu��n)/��犣�RPM����(d��ng)ģ�M��ݔ���
****ֵ�r(sh��)����(du��)��(y��ng)��늙C(j��)�D(zhu��n)�١� |
|
ģ�Mݔ�����^(q��)늉� |
P1��12
|
0~3300
|
100
|
��λ������ԓ����(sh��)�����O(sh��)��늙C(j��)����
�ȕr(sh��)��(du��)��(y��ng)��ݔ��늉���
|
|
�ք�(d��ng)�ٶ��{(di��o)��(ji��)��(d��ng)�� |
P1��13
|
1~999
|
1
|
��(n��i)���ٶ�ģʽ�r(sh��)�ð��I��׃�ٶȵĮ�(d��ng)��(�� 1 �°��I���p���D(zhu��n)��)
|
|
�֏�(f��)Ĭ�J(r��n)����(sh��) |
P1��14 |
0~1 |
0 |
�O(sh��)�� 1 ���˳��O(sh��)�ã�������늣�����
����(sh��)����(hu��)�֏�(f��)��Ĭ�J(r��n)ֵ | |
����D��������� 4 ��(g��)���I���քe��
|
��SET�����O(sh��)�á����������I�����M(j��n)����˳� P1 ϵ�е�
�O(sh��)�òˆΡ�
|
�������͡��������քe�ǡ��ӡ��͡��p���������x��
��(sh��)̖(h��o)���{(di��o)��(ji��)����(sh��)��(sh��)ֵ�����С��ӡ��I߀���M(j��n)��ԇ�\(y��n)��
���ܵğ��I��
|
��ENT�����_�J(r��n)���͡��\(y��n)�С��������O(sh��)�Å���(sh��)�r(sh��)�����I�������������M(j��n)��?y��n)��?sh��)��(sh��)
ֵ�{(di��o)���������λ����ԇ�\(y��n)��ģʽ�£����I���چ���(d��ng)��ֹͣ늙C(j��)�\(y��n)�D(zhu��n)��
|
�@ʾ�f����������λ��(sh��)�a���@ʾ��888888��������߅�ǵ�һλ��Ҳ��****λ�� |
|
ע�⣺���ԇ�D�ĵą���(sh��)ֵ����ԓ����(sh��)��****���Sֵ�����Č��������S�����I
���o����(y��ng)�� |
|
3.3 ����O(sh��)����(sh��) |
|
�e���f����
Ҫ���O(sh��)�Ã�(n��i)���ٶȣ�P1.1���ٶȞ� 1000 �D(zhu��n)/��犡�
�������E���£� |
|
0��,�(q��)��(d��ng)��̎�ڴ��C(j��)��B(t��i)������SET���I�� |
|
2���ٰ���SET���I���@ʾ��P1�� |
|
3. ���������I��ֱ���@ʾ��P1�� |
|
0��,�(q��)��(d��ng)���M(j��n)��?y��n)��?sh��) P1 �O(sh��)�à�B(t��i)�� |
|
5. ����ENT���I���W�qλǰ�ƣ�ֱ���� 4 λ�� |
|
������(sh��)����ɲ��Ԅ�(d��ng)���档 |
|
8. �ٴΰ���SET���I���@ʾ��P2 |
|
9.�ٴΰ���SET���I���ص����C(j��)��B(t��i)���@ʾ��H |
|
ע�⣺���օ���(sh��)�ĺ�Ҫ������늲�����Ч��
ע�⣺����(sh��)�������Qǰ��(bi��o)ע�С�ı����˅���(sh��)��늙C(j��)�\(y��n)�Еr(sh��)�����ġ�
ע�⣺���ԇ�D�ĵą���(sh��)ֵ����ԓ����(sh��)��****���Sֵ�����Č��������S�����I
���o����(y��ng)�� |
|
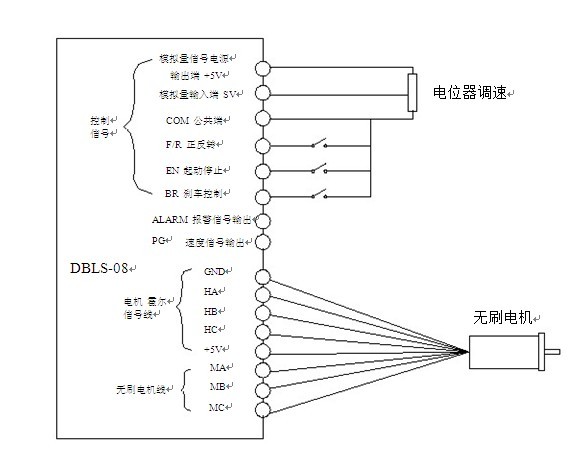
��1���{(di��o)�ٷ�ʽ
���(q��)��(d��ng)���ṩ�������N�{(di��o)�ٷ�ʽ�Ñ������xһ�N��
ģ�M늉��{(di��o)�ٿɌ��ⲿ�λ���ăɂ�(g��)�̶��˷քe�����(q��)��(d��ng)���Ŀ�����̖(h��o)��
�ڵ�+5V �� COM �ˣ����{(di��o)��(ji��)�˽��� SV �˼���ʹ������λ����10K~100K���{(di��o)
�٣�Ҳ����ͨ�^�����Ŀ��Ɔ�Ԫ���� PLC.��Ƭ�C(j��)�ȣ�ݔ��ģ�M늉��� SV �ˌ�(sh��)
�F(xi��n)�{(di��o)�٣�����(du��)�� COM����SV �˿ڵĽ��ܷ����� DC 0V~+5V����(du��)��(y��ng)늙C(j��)�D(zhu��n)�ٞ� 0~
�~���D(zhu��n)�١�
Ҳ��ʹ���ⲿ��(sh��)����̖(h��o)�{(di��o)�٣��� SV �c GND ֮�g����ʩ�ӷ�ֵ�� 5V���l��
�� 1KHz~2KHz ���}����(sh��)����̖(h��o)��PWM���M(j��n)���{(di��o)�٣�늙C(j��)�D(zhu��n)������ռ�ձȾ���
�{(di��o)��(ji��)��
���(q��)��(d��ng)��Ҳ�ɲ���ͨӍģʽ���ơ�
/EN��2��늙C(j��)�\(y��n)��/ֹͣ���ƣ�ENEN��
ͨ�^���ƶ��� EN ����(du��)�� COM ��ͨ����Կ���늙C(j��)���\(y��n)�к�ֹͣ����(d��ng)�c��
�ӽ�ͨ�r(sh��)늙C(j��)�\(y��n)�з�֮늙C(j��)ֹͣ��ʹ���\(y��n)��/ֹͣ�˿���늙C(j��)ֹͣ�r(sh��)��늙C(j��)����(j��)
����O(sh��)�õĆ���(d��ng)�r(sh��)�g����(d��ng)��ͣ܇�����\(y��n)��(d��ng)Ҏ(gu��)����ؓ(f��)�d�T��Ӱ푡�
/F/R��3��늙C(j��)��/���D(zhu��n)���ƣ�F/RF/R��
ͨ�^���ƶ���F/R�c����COM��ͨ����Կ���늙C(j��)���\(y��n)�D(zhu��n)����(d��ng)F/R�c��
��COM����ͨ�r(sh��)��늙C(j��)형r(sh��)��\(y��n)�У��挦(du��)늙C(j��)�S�� ��֮�t늙C(j��)��r(sh��)ᘷ����\(y��n)�D(zhu��n)��
��(d��ng)늙C(j��)̎���\(y��n)�D(zhu��n)��B(t��i)�M(j��n)�� ��/���D(zhu��n)�x���ГQ�r(sh��)��늙C(j��)��(hu��)�Ԅ�(d��ng)��ͣ܇Ȼ�����Է���
��(d��ng)�\(y��n)�D(zhu��n)��
BR��4���Ƅ�(d��ng)�x܇��BRBR��
ͨ�^���ƶ��� BR �c���� COM ��ͨ����Կ���늙C(j��)���Ƅ�(d��ng)ͣ�C(j��)����(d��ng)���ƶ��� BK
�c����
COM ���_�r(sh��)��늙C(j��)�\(y��n)�У���ͨ�r(sh��)늙C(j��)�Ƅ�(d��ng)ֹͣ,��(d��ng)�(q��)��(d��ng)���l�����F(xi��n)�^����(b��o)��
�r(sh��),�t��Ҫ��(du��)�oˢ�(q��)��(d��ng)�����b�Ƅ�(d��ng)�x܇���,���]��ֵ��С�� 100 �W,���ʲ�С��
100W,���b�r(sh��),�(q��)��(d��ng)�����̎�ڔ��,ָʾ��Ϩ����B(t��i)������Ƅ�(d��ng)�x܇������x��
������Ҫ�������M(f��i)��
PG��5��늙C(j��)�D(zhu��n)����̖(h��o)ݔ����PGPG��
�ٶ��}�_ݔ����ԓ�˿ڞ� OC ݔ����30V/10mA max����PG �ˑ�(y��ng)�c�Դ֮�g
�� 3K��~10K��������衣ԓ�ˌ�ݔ���l�� F��HZ���c늙C(j��)�D(zhu��n)�� N(RPM)���P(gu��n)ϵ
���£�F=N * P / 60������ P ��늙C(j��)�O��(du��)��(sh��)����늙C(j��)ÿ�D(zhu��n)ݔ�����}�_��늙C(j��)�ĘO
��(du��)��(sh��)��
��6����(b��o)��ݔ��
�(q��)��(d��ng)����(b��o)��ݔ����ԓ�˿ڞ� OC ݔ����30V/10mA max������(b��o)��ݔ�����c�Դ
֮�g�� 3K��~10K��������衣��(b��o)���r(sh��)ԓ���c GND ��(d��o)ͨ�����ƽ����ͬ�r(sh��)�(q��)��(d��ng)��
����ֹͣ����̎�ڈ�(b��o)����B(t��i)�� |
4.2 ����ģʽ��
�(q��)��(d��ng)���Ĺ���ģʽ�����N����ͨ�^����O(sh��)�ã���һ������ք�(d��ng)����ģʽ��
������ⲿ�˿ڹ���ģʽ��늙C(j��)�����O(sh��)����ʽ��������(sh��)�a���@ʾ늙C(j��)�\(y��n)�D(zhu��n)�D(zhu��n)
�١�����幤��ģʽ�£��� R/S �I����(d��ng)��ֹͣ늙C(j��)���L��ס+��-�I���ӡ���
��늙C(j��)�D(zhu��n)��,�����OENTER �I�_��늙C(j��)�D(zhu��n)�١�늙C(j��)���O(sh��)���D(zhu��n)���\(y��n)�С������N��
ͨӍģʽ��
4.3 ���o(h��)ģʽ��
��(d��ng)늙C(j��)���\(y��n)���^���г��F(xi��n)��������(sh��)�a���@ʾ������
(1) OL ��ʾ늙C(j��)���D(zhu��n)��
(2) OC ��ʾ�^�����
(3) HE ��ʾ�������ϡ�
(4) LV ��ʾݔ��Ƿ����
(5) HU ��ʾݔ���^����
(6) EE ��ʾ IPM ģ�K���ϱ��o(h��)��
(7) OT
��ʾ늙C(j��)�^�ᡣ
�塢 ϵ�y(t��ng)ʹ��
|
���Ƚ���늙C(j��)���(q��)��(d��ng)�����B����늙C(j��)�@�M����������̖(h��o)�����Դ��������� |
|
��(y��n)����Ҫ���B��,������늙C(j��)�ǘ�ͨ�^��׃�Ӿ���(sh��)�F(xi��n)�����D(zhu��n)�������_�Ľ� |
|
����(hu��)��(d��o)��늙C(j��)�\(y��n)�D(zhu��n)������,�������\(y��n)�D(zhu��n)���������п��ܓp��늙C(j��)���(q��)��(d��ng)���� |
|
��(d��ng)��늙C(j��)���ʾ���HALL �����(q��)��(d��ng)���Դ���B�Ӻúȿ���ԇ�\(y��n)�У����O(sh��) |
|
�ú�늙C(j��)�Ŀ��Ʒ�ʽ�����ƻ��Ƕ˿ڿ��ƣ����O(sh��)�ßoˢ늙C(j��)�ĘO��(du��)��(sh��)�������_ |
|
�ĘO��(du��)��(sh��)�@ʾ�D(zhu��n)�ٲ���(zh��n),����(n��i)������(sh��)�{(di��o)���e(cu��)�`�� Ȼ����(d��ng)�_�P(gu��n)�����p�Ӵ�늙C(j��) |
|
�λ����늙C(j��)��(y��ng)ԓ�\(y��n)�У���늙C(j��)���\(y��n)�У����߰l(f��)�������(q��)��(d��ng)����(b��o)��,�п��ܞ�� |
|
�C(j��)�Ӿ�����(du��)��������ؓ(f��)�d̫��Ո(q��ng)���z��oˢ늙C(j��)���ⲿؓ(f��)�d��ֱ�����Ԍ�(sh��)�F(xi��n) |
|
늙C(j��)�������\(y��n)��(d��ng)��ֹͣ���ɡ� |
|
��ԃ�
������������
�Ԓ��010-87197282-811
�֙C(j��)��18801063276
qq: 928221169
�Ԍ��W(w��ng)ַ��http://zgbjdj.com/news2.asp?id=9440 | | | | | | |


