һ���oˢֱ��늄әC����Ҫ���g����
(1)늄әC����km����늄әC��һ��Ʒ�|ָ�ˣ���λ��n��m��w1��2����һ���o���w�e��늄әC���ԣ�kmֵԽ�ߣ�늄әC�Ĺ��ʾ�Խ��
(2)늄ӄݳ���ke��ָ�چ�λ�D����늘��@�M���Б��a����늉���ke=ct�զġ�
(3)���س���kt��ָ�چ�λ늘���������a����늴��D�أ��ַQ�������`���ȣ�kt=ct�զ�
(4)늚�r�g������eָ���o늘��@�Mʩ�ӆ�λ�A�Sݔ��늉���늘�����_��63�����Bֵ����Ҫ�ĕr�g��
(5)��ֵ����l��ָ����B(20��)�l���£���10s֮��늘��@�M�ĜضȲ����^****���Sֵ����r�£�늄әC���ܰ�ȫ�a�������ء���Ȼ���a����ֵ���ؕrҲ�������������w�����S��****ȥ�Ŵńӄݡ�
(6)�B�m���D����tcsָ���D�ӱ����D�͟o���L�ĕr�g���ڃ�늘��@�M�ĜضȲ����^****���Sֵ�ėl���£�늄әC���ܰ�ȫ�a�������ء��B�m���D��������Ҏ���İ��b�l���£��簲�b��ʲô�Πô�ߴ����ʲô�����Ƴɵ�ɢ����Ϝy���õ��Ĕ�ֵ�� 
�����oˢֱ��늄әC�c����ͬ��늄әC�ı��^
�oˢֱ��늄әC����Ӿ�·�c늙C�ڞ�һ�w�������M����Ӽ��g���C���Ƽ��g������늙C�I���ǵ��͵ęC�һ�w���aƷ�����M��늙C�����Ƽ��g�İlչ���oˢֱ��늄әC��������ʽ늄әC��Ŀǰ�����Ԅӿ���ϵ�y���ձ�ʹ�õ�����늄әC�Ѓɴ�����oˢֱ��늄әC������ͬ��늄әC���@����ߵ���Ҫ�^�e�M�б��^���Թ�������
1���OӋ����
�OӋ�oˢֱ��늄әC�ij��l�c�����b�������w���D��ȡ����ˢֱ��늄әC�Ķ��ӴŘO����ԭֱ��늄әC���D��늘�׃�鶨�ӣ��D6 13��ʾ��oˢֱ��늄әC��׃ʾ��D����ˢֱ��늄әC�������Cе�Q������ֱ������D�Q��������β��Ľ�������bdcm�nj��������(���H��Ҳ�����β�)ֱ��ݔ�붨�ӣ����̎����ʡȥ�˙Cе�Q�������ˢ��Ҳ�Q����ӓQ��a���㶨늴��D�أ�Ҫ��ϵ�y��bdcmݔ���������Q���������ͬ�rҪ��bi)cm��ÿ��Б�늄ӄݞ����β������Ҳ�Qbdcm�鷽��늄әC�����OӋ����ͬ��늄әC�ij��l�c��ֱ���������wȡ��늄��ͬ��늄әC�D���ϵĄ���@�M����ʡȥ��ž�Ȧ�����h���ˢ�� 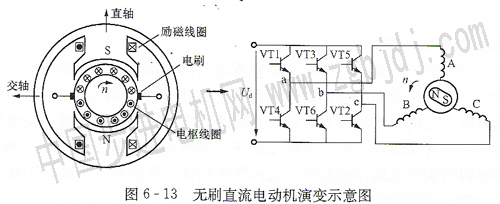
�D6��14��ʾ������ͬ��늄әC��׃ʾ��D��pmsm�Ķ����c늄��ͬ��늄әC������ͬ��Ҫ��ݔ�붨�ӵ������Ȼ���������ҵġ���a���㶨늴��D�أ�Ҫ��ϵ�y��pmsmݔ���������Q���������ͬ�rҪ��pmsm��ÿ��Б�늄ӄݞ����Ҳ������Ҳ�Qpmsm�����Ҳ�늄әC�� 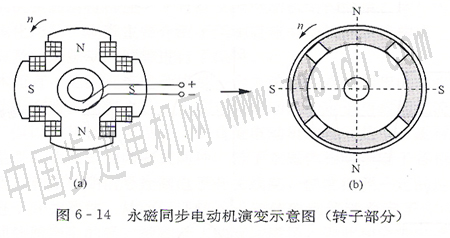
2���Y����ʽ
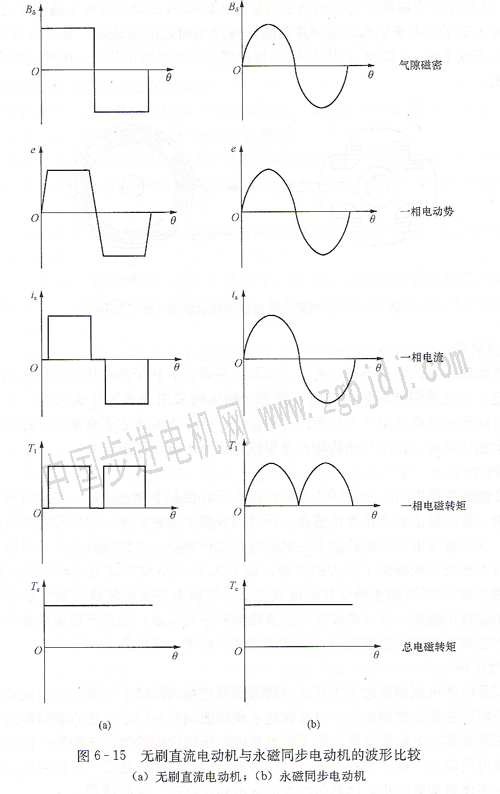
���ښ�϶���ܵȵIJ��β�ͬ(Ҋ�D6��15)�����߶����D�ӵĽY����������e���oˢֱ��늄әC�Ķ���ͨ���������༯���@�M���D�������w�t���ñ�����Ƭʽ�Y���������w��Ⱦ�������ͬ��늄әC�Ķ��Ӳ��ö̾�ֲ��@�M���D�������w��Ҫ�Ѓ�������������w�Y���̓��������w�Y�����@�ɷN�Y�����ɴ_����϶���ܵIJ��νӽ����ҡ�
3�����Ʒ�ʽ
����׃�l�Դ��늕r������ͬ��늄әC�����_�h�������{���\�У����ӕr�D���ϟo�����b�����@�M�����D�S���b��λ�Â��������t�ɘ��ɻ���λ�÷������]�h���Ƶ��Կ�ʽ����ͬ��늄әC���oˢֱ��늄әC���D�S��һ���b��λ�Â��������������Կ�ʽ��Ŀǰ������늄әC�o���������Ƽ��gҲ�õ��˺ܴ�İlչ����bdcm��늄әC��늉��z�y�������������C��늉��z�y����pmsm��늸�׃���OЧ�������Uչ�������V����B��Ӌ���ȡ����ǣ��]������D��λ�Â�������������ζ������Ҫ�z�y�D�ӵ�λ�ã����Dz�ʹ���~����b�ã��D�����Äe�ķ������õ��D��λ����̖���@�Ӽ��ܽ��ͳɱ���������߿ɿ��ԡ�
4��늴��D��
����ͬ��늄әC�������D׃���������D���a���B�m�z�y�D��λ�ã��������D�ӵ��D���S�r�{�����ӂ���׃���Ŀ����l�ʣ��Դ_���������D�ńӄ��c�D�������w�ńӄ�ͬ����������a����늴��D�ػ������Ǻ㶨�ģ����oˢֱ��늄әC�t�H��z�y�D�ӵ�����λ�ü��ɣ������@Щλ�ñ�ɛQ�����ӂ���׃���_�P������ͨ���r�̣��Ķ����C�������D�ńӄ���ƽ�����x���c�D�������w�ńӄ�ͬ����������a����늴��D�ش���һ�����}�ӡ�
5�������ܶ�
���w�e�������Ƕȿ����oˢֱ��늄әC�Ĺ����ܶ�Ҫ������ͬ��늄әC�ߣ��书���ܶ�һ��������ͬ��늄әC��]��15�����@��Ҫ�w���ڟoˢֱ��늄әC�Ƿ���늄әC���������Чֵ�c��ֵ�ı�ֵҪ������ͬ��늄әC�ߣ���λ��ֵ������a����늴��D��(��ݔ������)�^��
6��������
�oˢֱ��늄әC���D����ͨ�^�{��ֱ���˵�늉������Ƶģ��ʿ���ϵ�y���^���Σ��r���^���˵������ړQ��������D���}�ӡ�ʹϵ�y�ķ����Ժ̈́ӑB�����Բ�{�ٷ���Ҳ�^խ���ʶ������ڌ��\������Ҫ���Ǻܸߣ��w�e���������Ĉ��ϣ�������ͬ��늄әCͨ���������Ҳ��}���{��(spwm)��׃�l�Դ��늣��������v�����ϵ�y�^����s���r���^�F�������������ό������D�ň�ʽ늄әC���D���}��С-�D�ٷ������^�ߣ��e���@�N늄әC���Ԍ��F늴��D�ص�ʸ�����ƻ�ֱ�ӿ��ƣ�ϵ�y�ӑB���ܺã�����m����Ҫ��߾��ȿ��ƺ͌��{�ٷ����Ĉ��ϡ�

|











