ֱ������늄әC�đ���
1���چξ��t�Ѿ��S�ٶ�ϵ�y�đ���
��ӹ��I��Ѹ�ٰlչ��Ҫ��ξ��|���M������ߺ͝M��ijЩ�ξ���ͬ���a��ˇ��Ҫ���Hֱ�������a�ξ��Ĺ�ˇ��������ߣ��������O��Ҳ������� һЩ���ߵ�Ҫ�����磺���{�ٷ��森�ξ��t�Ѿ������������D�Լ���m�ĸ�ۙ�����D�ȎN�ٶȣ�ϣ���ܵõ��������{�ٷ��N���^�õ��ٶ�ƽ��
�ԡ��o���еĵ����\�D�Լ��M���p�ق�����ɵęCе��ӵȣ���˶�������ֱ���ӵ��ٶȿ���ϵ�y������
�@�N���͆ξ��t���әC��Ҋ�D3-3-13���C�Mlֱ���ӽz�����D���b�ڽz���ϵ���ĸ�t�����D�\���D�Q��ֱ���\�Ӳ���������S�������������Ƅӡ��C�M2�̶��ڠt�w����ݔ���S���ӱ�݆���D����݆����3���؈A�ܵȷֵ�݆݁��݆݁����A�����c����Sͬһ���ʰ돽�ĈA���沢���@݆݁���D��
݆݁�ɉ��o���ɉ�������S�ό��F�����D�ӣ���������ϡ����Ƅӕr��ѥ݆�o���������S���D��ͬ�r�@݆݁�S���D�@����弴ͬ�r���F�����D��ֱ���\�ӡ��ξ��t�Ѿ��S���\��ͬ����ˣ�ֻ���Ѿ��S���෴�������D�ԝM�㹤ˇ�����Ҫ��
�����ξ��Ŀ��ƹ�ˇ��һ ��Ҫ����ϵ�y���ٶ����㵽늄әC�r��
�Ѿ��S������0.5r��min(�ஔ1.5mm��min);
��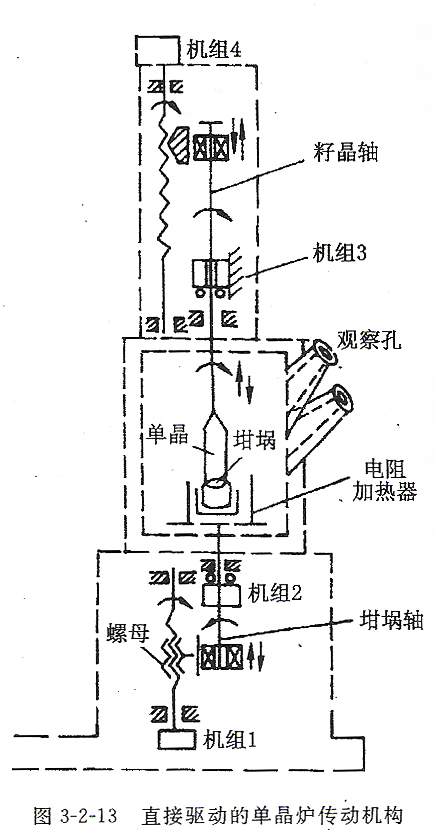 ���S��ۙ��0 033��0 025r�� ���S��ۙ��0 033��0 025r��
mIn(�ஔ0 l��0 075mm��mln)��
�Ѿ��S���D����40r��min��
����S���D����10r��min��
�@�N����ֱ���ӵĂ��ӷ�
������������һЩ���c��
(1)�ٶȷ����ȸߣ��ӑB�Ժá���������������ٶȷ����ȣ��ٶ��`�����С��1����
(2)�{�ٷ��������c��ͨ�Üp���X݆���{��ϵ�y��ȣ����{�ٷ���Ҫ��1�����������ϣ���������
���ٕr�o���ЬF��
(3)�������С���Cе�������������ڸ��|���Ćξ��γɡ�
(4)���әC�����Σ������ں����t�ӽY������t�w�Y�����ȵ��L�ڷ������ṩ���������ء�
�ξ��t�����r����նȞ�10һ5mmHg��ƽ��ؓ�d�D�؞�O��98N��m��ؓ�d���е��D�ز���
35����****�\���ٶȞ�90r�� �D3��2��13ֱ���ӵĆξ��t���әC��min��****�ٶȞ�h��h��Ҫ���\��ƽ�����o���С��o���ӡ�
�����t�ӵĹ�����r��Ҫ����M�ɵ�ֱ�����ٶ�ϵ�y�����ٶȷ������_104�η������������ٶȵķ�������늙C�ٶȞ�Ir��h�£��ѽ��_��1����
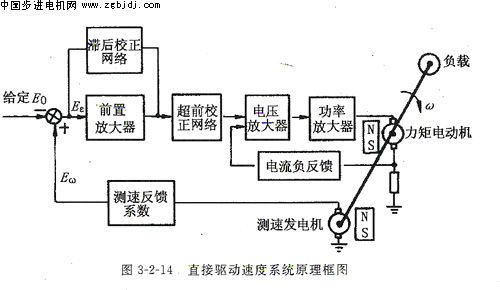
ֱ�����ٶ�ϵ�yԭ����DҊ�D3 3��14���o���ٶ���̖E0��һ��-6V늉������^��Ȧ�λ���։����ṩ�oǰ�÷Ŵ������ٽ��^늉��Ŵ����Ƅӹ��ʷŴ����������ʷŴ��ݔ����������늙C����ؓ�d���D���ɜy�ٰl늙C�z�y���ٶ���̖������ǰ�÷Ŵ���ݔ��ˣ��c�o���ٶ��M�б��^������֮�����̖���`��늉�E�ţ��ٽ��Ŵ��ʹ늙C�_���A���ٶȷ����\�С�
���\���^���У�������Д_�ӕr��ؓ�d�D�ؕ�ͻȻ���ӣ������˲�r���ٶ��½����t�y�ٰl늙C������늉��½��������ڽo����̖Enδ׃������`��늉�E�����ӣ����^�Ŵ��ʹ늄әC�����ٶȵ��A��ֵ����ؓ�d�D��ͻȻ�pС���t�����^���෴��
�ξ��t���Ѿ��U�����������D���ٶ�ϵ�y���ٶȾ���Ҫ���ߣ������ٟo���С��������С�t�����������Q���P�I���}֮һ����˲���ֱ������늄әC�����`���Ȝy�ٰl늙C�M�ɵ�ֱ����ϵ�y�ȸ���늙C���^�X݆�p�ٵ���ϵ�y���܈A�M�ؽ�Q���}�������ٶȾ��ȡ����Զȡ��l�����ȵ�
�o���ӑBָ����Ҳ��һ������ߡ�
2���ھ��ܵ����b���еđ���
���ܵ����ŷ�ϵ�y��һ�����_���ٶȿ���ϵ�y�������������ϵ�y����yԇ�С��ڜyԇ�^���У���Ҫ������Ƹ��N���ʡ�
�����ǑT�Ԍ����еĺ���Ԫ�����D�_�t�ǜyԇ���ݵ�һ����Ҫ�O�䡣�����΄��Ǟ����о��T�Ԍ���ϵ�y����Ԫ�������ܲ��yԇ���ݶ��ͮaƷ�ĸ��N�`��ֵ���Ա��ȡ��ʩ���a����Ҏ�ɵ��`����ϵ�y�ľ��ȡ�
���ܜyԇ��һ����Ҫ��ָ�]ʹƯ���������������]�hϵ�y�Б��Õr���܃��ӵ�һ���C��ָ�ˡ�Ư���ʵĴ�Сֱ��Ӱ푌����������ʺ͝�ͧ�L�ڝ����ĺ���ʴ_�ȵȣ�һ����v���D�_�ľ���ֱ�ӷ�ӳ�����������_���ľ��ȣ����g�ӷ�ӳ��һ�����Ҍ������g�lչ��ˮƽ�������D�_���Ȳ�����ߣ�ֱ��
����늄әC���`���y�ٰl늙C���Ƴɹ����ƏV���ÿ����f�����P�I���á�
20���o50������ڣ��D�_�ձ���ø���늄әC���^�p�ٙC���M���ӣ�ͬ�r���ÝL���S�С����r���ݵ�Ư��һ��ֻ�ܜy��0.1�ȣ�h���ڸ���Һ���S�к�ɜy��0.01�ȣ�h��
20���o60��������D�_������ֱ������늄әC���`����ֱ���y�ٰl늙C�����_ʼ���ÿ՚��S�У��@�r���Ԝy��0 001�ȣ�h���D3��2��15��ʾ���鹫˾��ͬ�OӋ��712�;��������D�_ϵ�y��D��
��ϵ�yҪ��
(1)�ٶȷ�����0��01��6�ȣ�s��0.025��1500�ȣ�S(�����).
(2)���_�ȣ��ض�׃���ڡ�5��ķ����ȣ��\�D1�����o�B���_Ҫ��ٷ�֮һ��
(3)��ӡ�+���}�Ӹɔ_�����������ٶȷ�����С�ڰٷ�֮һƽ����ֵ
(4)���ƣ�
��ϵ�yNNNN+N����Ƶ�������
��ϵ�y����܉���ո��N�ٶ�ָ�
(5)����������6��8--47 6N��m��
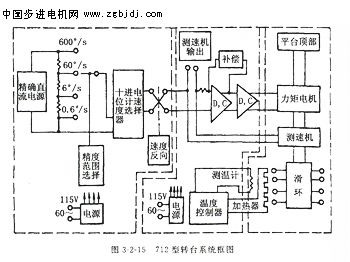
����Ҏ����712ϵ�y���OӋָ�ˡ���ԓָ����ԓϵ�y�ٶȷ�����â0.01�ȣ�S~600�ȣ�s�ض�׃���ڡ�5�漰��1���r�g���܉��C�ٷ�֮һ���o�B���ȡ�ԇ��������ݵĻ���Ҫ���DZ��ֶ��ڲ�׃�����ٶȻ����@Щ׃��������ӡ����}�Ӹɔ_����һ���f�����@ЩЧ�����^���ٶȕr�DZ��^�@���ġ�
���g�l��Ҫ����0 01����s�r���ŷ�ϵ�y�ľ��_�Ȟ�ٷ�֮һ���@��һ�N߸�͵��ٶȣ������Ҫ�dz��`���Ĝy�ٙC��Ҳ���]�^����ϵ�y����ֱ����ֱ���ŷ�ϵ�y������ǰ;�ġ��@�������`����ֱ���y�ٰl늙C���`���ȱ�z���y�ٰl늙C��10��100�������_��ֱ��������̖�Ƚ���ϵ�y�еĿ�����̖�����@�ã�����ϵ�y���ƺ�У�ʡ�����ֱ��ϵ�y�Ŵ���Ч�ʸߣ�Ҳ����Ҫ���{��ʹϵ�y�Y���^���β��ܿɿ��������\�С�һ�������D�_�ľ��țQ�����Դ�l�ʣ���ֱ��ϵ�y�c����l�ʟo�P�����й̑B�Ŵ�����ֱ����ϵ�yҲ�o�z�ޡ��S�o�ṩ�˷���l��
��ǰ��������Ҫ�ǿ���Ԫ���ϵ�f�_�D�خa��Ӱ푣�������ֱ������늄әC���}���D�ء��S�е�Ħ�����D�_���D�ؔ_�ӵ�ԭ������ɵģ��ŷ�ϵ�y�OӋ��Ŀ�ľ���Ҫ���@Щ�D�ص�Ӱ푱M���������OС��
���溆���˃ɷNֱ������늄әC��ϵ�y�еđ�����r���S��ֱ������늄әC���÷����ĔU����aƷ���g���ܲ�����ߣ���Ʒ�NҎ��Ҳ�������ӡ�������˾�����a������늙C�������S������Ӌ�����ڸ��N�l���ͭh���£��Ď�ǧӢ�ߵ�ˮ����ӿ��g�ğo�˹����\�У�����늙C������
���V���đ��÷����������½�B�����^ȥ���������ϵ�y�����һЩ��Ҫ�Ŀ���ǽ���������늙C�߿ɿ��ݻ��A�ϸ�����ġ�����ʡ����Ժ�ĵ�1���T�Ԍ���ƽ�_���Dz���ֱ������늄әC�������İ����_Ӌ����܉��̫��^�yվ���p�������w����ˮ��̖������̖���������Լ���ͧ���b��ı��O�ǡ�����Ȍ������Dz�������늙C����ϵ�y�еĈ���Ԫ����
�҇���20���o60��������_ʼ�M��ֱ������늙C���_�l�����ƹ����������Ƴ���Ʒ���S���������I�����ù��I�Ԅӻ�����Ҫ���@�N늙C���҇����M�ж�Ʒ�N����Ҏ���ϵ�����a�������r�C��ұ�𡢃x�����p����ӡȾ���켈���Ӱ���ҕ��ͨӍ���V�����C�����t����е���C���˵����ù��I����
������ϵ�y�ж��õ��˲�ͬ�̶ȵđ��á�
|











