(��)�����ŷ�ϵ�y
ֱ������늄әC�ɑ������_�h���]�h�ɷN�ŷ�ϵ�y������Ҫ�����]�h�ŷ�ϵ�y��
�_�h�ŷ�ϵ�y��ϵ�y�o�������z�y�ȭh����ֱ������늄әCֱ����ؓ�d���ɽo��늘�늉��M�п��Ƶ�ϵ�y���@�N�÷��Q֮���_�h�\�У���D
3��2һ9��ʾ��
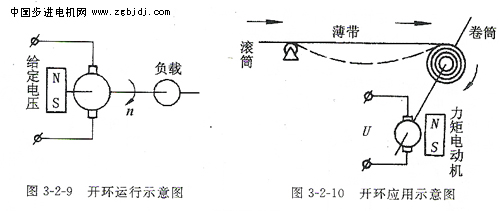
�@�r��늄әC�mȻ�ܽo��늉������\�У������ڟo�z�y�b�ã��\����r���ö�֪���@�N�\����r��늄әC�������D�ز��Ӻ�ؓ�d������ɔ_�D��Ӱ��^������Մ�������ܾ��ȣ������D��Ҳֻ����ÿ��犎�ʮ�D���ϲ��ܱ��^ƽ�����\�У����]�п��������\����IR��min���£��@�N��rֻ����ij
ЩҪ�ߵĈ��ϣ�����ȥ���p�ٙC�������á��Еr��ijЩ���������R�������D��늄әC���^ܛ�ęCе�����@һ�c�������_�h�\�У�Ҋ��3-2-10����ijЩ�������L�l�ĮaƷ�����У����磺���^�����Ժ�ľS��]�z�ľ��@���켈�C�ļ������@��ӡȾ����Ă��͵ȣ��ڹ�ˇ���̵�ĩ�˲�������늄әC�ӝLͲ����������ؓ�d�D�ؼ��\���ٶȽo늄әCʩ��һ�m����늉��������Դ�^�d���o�b�á����\���ٶȳ��^�����ٶȕr������ؓ�d�D�pС������늄әC�����\�D��ֱ���c�����ٶ�ͬ����֏������\�С���ijЩԭ����ɂ����ٶȜp����ֹͣ�r��늄әC������S��ؓ�d�Ӵ�����ӣ��ڏ����Ӵӽ���������ؓ�d�r���t�^�d���o�����á�
ֱ������늄әC��Ҫ������λ�á��ٶșz�y���������^���Ŵ�ȭh���M�ɵ��]�h���Ƶ�λ�ú��ٶ��ŷ�ϵ�y���ԝM��λ�á��ٶȾ��ȵ��ָ��Ҫ���͵đ��ÿ�DҊ�D3-2-11.
�@��һ���`�����ϵ�y��������λ���ŷ�ϵ�y�r�����ֱ��������Cе���ӎ���ݔ��λ���D�Q���o��һ����Ľ�λ�ã��������D�Q�ɽo�����Ӎ̖-EQ1,��ǰ�÷Ŵ�늉��Ŵ��Ƅӹ��ʷŴ��Ա�õ����蹦�ʵ������
���ʷŴ�ݔ����������늄әCʹ�䎧��ؓ�d���D���b��ͬ�S��ݔ��λ���D�Q���z�y��ؓ�d�D�Dz��D�Q���c�D���������Ӎ̖��������ȥ�c�o��ֵ���^���õ�λ���ٲ�늉�E��=EQ1-EQ2�ٌ����`��늉�E�ŷŴ��^�m����늄әC����ؓ�d��ݔ��λ���D�Q���D�ӡ��˕r�S��ؓ�d��λ�õ�����ݔ��λ���D�Q�����D�Q����늉�EQ2�ɱ��������ߣ�ʹ�`��늉���u�pС���˿����^��һֱ���m��ؓ�d�D���c�o����λ����ͬ(��E��=EQ1-EQ2=0)�r�t�ŽY�����˺����o��ֵ�ٸ�׃һ���Ƕȣ��tϵ�y�ֽ��^һϵ�еĿ����^�̣�ʹؓ�d���S���D�ӵ��µĽǶȡ��@�Nؓ�dѸ���S���o����λ��׃�������S�D�ӵ�ϵ�yͨ���Q��λ���ŷ�ϵ�y��
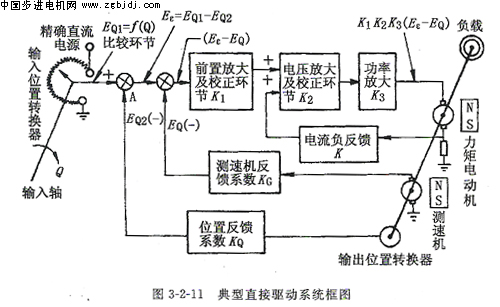
�@�������^������˲�g��ɵġ��ďV�x���v���@��˲�r׃���ĕr�g�����^ϵ�y�^���^�̕r�g��r�g���������c�D�أ��T���ȼ���Փ���ٶȵ�ֱ�����P������^���^���������o��λ���S�C׃���ٶȺܿ�r(�����_��ijЩ��ۙ��r)���tϵ�y������϶�����һ���S�C��ۙ�`�����ӳ��ϵ�y�ĄӑB����
���á��D3 2 11�Ўׂ�У���h�����Ǟ������ϵ�y�ӑB����ָ�˶��O�õġ�
�ٶ��ŷ�ϵ�y��ʹݔ���S���o������늉�������ijһ�ٶ��µ����D��ϵ�y��ָ����ݔ���ٶȾ��ȁ��_�����ٶ��ŷ�ϵ�y������늄әC���ŷ��Ŵ���
ǰ�÷Ŵ��������ʷŴ���)����늉���ָ����̖Դ��ֱ���y�ٰl늙C�M�ɣ���D3-3��12��ʾ���D�У�ֱ���y�ٰl늙C�ṩһ���cݔ���S�ٶȳɱȵķ�����̖������늉��c�y�ٙCݔ����̖֮����`����̖���`����̖���Ŵ������늄әC����ؓ�d��
��������ʹ����r��֪�������_�����е�����ָ�ˣ�ֱ������늄әC��

���`����ֱ���y�ٰl늙C���cؓ�d�ӕrһ��Ҫ��M���ܲ��m���S������ȫ���Y�����b��ͬһ�����S�ϣ��S���ڿ��ܗl�������^�֞�ã��������τ��������ӆ�϶�͏���׃�ε����،��o���ӑBָ�˵�Ӱ����늙C���ӵİ��b����ý��|��e�^��ķnj��Ž��٣���ʹ��ͬ���ڟ������^������C�ȣ��Ԝp��ͱ�ŵ�Ӱ푺ͽ���늙C�������������D�Ӱ��b�IJ�ͬ�S��һ��Ҫ����0.02mm���ҡ�











