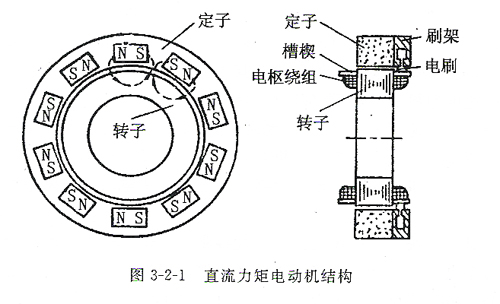
ֱ������늄әC���Пo�ˢ�b�÷���ֿɷ֞���ˢ�͟oˢֱ�������
�әC��
ֱ������늄әC߀�_�����D��ֱ������늄әC���p����늄әC��
ֱ������늄әC�͵��ٸ��`����ֱ���y�ٰl늙C�M�b��һ�𣬽M����
ë�y�ٙC�M��ʹ�Y�����o����
(��)���c
(1)���㵽ؓ�d�S�ϵ��D�أ��T���ȸߡ��ڈD3-2-2�У��ɷN��ͬ���
�ӷ������Ǟ���ʹؓ�d�õ������ͬ�ӵ��D�غ��D�١����ɂ�늄әC����ͬ
���D�ӑT���r����JT1=JT2,�˕r�ɷN�������㵽ؓ�d�S���D�أ��T���ȷ�
�e���£�
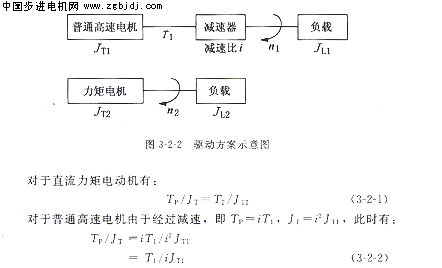
���^ʽ(3-2-1)��ʽ(3-2-2)���M����ͨ����늄әC���^�p�٣��D����
��i������늙C�T���s���Ŵ�i2��(������δӋ���p�����đT��)����Y��
����ͨ����늄әC�����أ��T���ȷ����pСi����
������Փ���ٶ�a=TP/JT���D�أ��T���ȵĴ�Сֱ�ӷ�ӳ�˼�����
����ֱ�����õ�ֱ������늄әC��ݔ���D����Ҫ�������Ƅ�ؓ�d�����ϡ�
����ͨ����늄әC��ݔ���D�t�������ڼ���늄әC���X݆�����ӵđT
���ϡ�
(2)�����^���푑��ٶȡ�����ֱ�����ܵõ��^�����Փ���ٶȣ���
��ֱ������늄әC�c��ֱͨ���ŷ�늄әC�T���������r�£�����늄әC��
�Cе�r�g����ҪС(һ���ʮ���뵽��ʮ����)����֮늄әC�OӋ��ŘO
�����^�࣬늘��F�Ĵ�ͨ�ܶȶȸߣ�ʹ늘�늸�С�����Ժ��Եij̶ȣ�����
늚�r�g��������С����������c���룬�Ķ�ʹ늄әC�S��늘������
���Ӷ��������L�ܿ졣���������ݔ���D�ؗl���£���ʹϵ�y�Ą��ȴ�7=
���ӣ��ӑB���ȵ�����ߡ�
(3)�^�ߵ��ٶȺ�λ�÷ֱ��ʡ����X݆�p�ٵ���ֱͨ���ŷ�늄әC������
�����X݆�X϶�������ŷ�ϵ�y�ľ��ȡ������ij�N���x���v��ֱ�������
�әC�Įa���Ͱlչ�Ǟ��������p�ٙC�����X϶�͏���׃����������ȱ�ݶ��l
չ�����ģ��e�nj��ڞ�@�úܺ�Ʒ�|��ϵ�y���Ը��б�Ҫ��
�ɈD3-2-3��Ҋ�����X϶�Ĝp�����ӣ����H�����c������һ�������^��
�����ڂ��әC���и����ˏ���׃�κͼ��ٶ��`��Ķ���
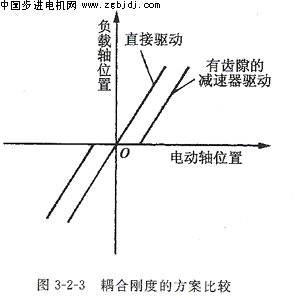
����ϵ�y���Ⱥ�λ�õľ��ȡ�
�ڲ���ֱ������늄әCֱ���ӕr�����ڸ���˾���Ҫ��ߵĜp���X݆��
ʹ늄әC�cؓ�d�Sֱ����ϣ������������X϶������ķǾ������أ���ʹϵ
�y�ķŴ����úܸ߶���Ȼ����ϵ�y�ķ�����
ͬ�r����ֱ���ӿs���˂�
��朣�������b��퍙Cе��τ��ȣ��p���˂��Ӳ����ď���׃�Σ��������
���������������b�õ���Ȼ�����l�ʣ����h�h���_ϵ�y�����_����푑��l
�����ޡ��@�ӽoϵ�y�õ��M��ĄӑB���o�B���܄�����ǰ�ᡣ��ʹϵ�y�@��
�����l��푑��ߵľ����Լ��ߵ��ŷ����ȣ��Ķ���@�ØO���ٵğo����ƽ
���\���ҵ���һ���µ�;����
(4)���Ծ��ԶȺá������@�늙C����r�^�õ�ܛ�ź�Ӳ�Ų��ϣ���·
�߶�ͣ���϶�x��ǡ����늙C�Ĵ�·�OӋ���C�����B�m�\�Еr��ݔ���D��
�cݔ������������Pϵ���Ķ�ʹ늙C�ľ��ԶȺã���ϵ�y���`����ƺ�ƽ��
�\�������˗l����
(5)���ٕrݔ�����ش��D�ز���С���\��ƽ�������Ը���p���X݆��
��ʹ늄әC�����ɄӲ����٣�����С��������늄әC����̎�ڵ��ٻ���D��
�B���Cе����С�������С��ʹ�b�ú��Ρ��ɿ����Y���o����