ֱ���ŷ�늄әC�x�͡����Pע�Ďׂ����ء����Ʒ�ʽ�����Ե�Ӱ�-�ӑB��������
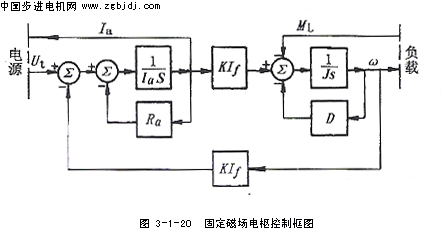
a.�����ͼ��̶��ň������늄әC��늘п��ƕr�ӑB���ԡ����@�N���Ʒ�ʽ�£�����늘з����ʹ�͵�Ӱ푣�늄әC�ĄӑB���Կ��������з��̱�ʾ��
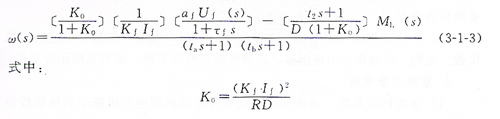
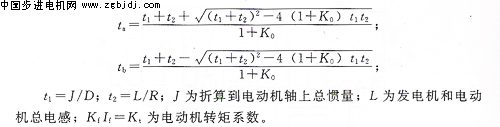
ʽ�У�s����ʽ���ӣ�La��늘�늸У�J�����㵽늄әC�S�ϵ�늄әC�T����ؓ�d�T��֮�ͣ�ML���@�㵽늄әC�S�ϵ�ؓ�d���ء�
�������̽M���ÿ�D�C�ϱ�ʾ�ڈD3-1-20�С�
b .�̶�늘�����´ň����ƕr�ӑB���ԡ����O늘О���������Դ��늣��t�ň�����늄әC�ĄӑB���Կ������з��̽M��ʾ��
�������̽M���ÈD�C�ϱ�ʾ�ڈD3-1-21�С�
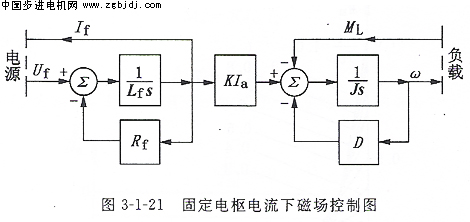
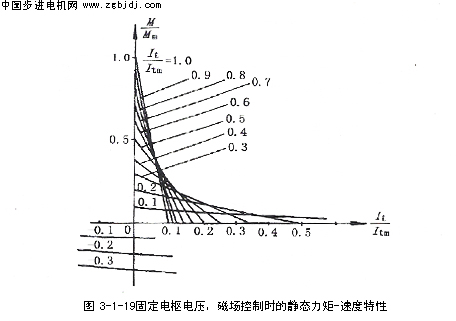
c.�̶�늘�늉��´ň����ƕr�ӑB���ԡ��ڹ̶�늘�늉���r�£��ň�����늄әC�ĄӑB���������з��̽M��ʾ��
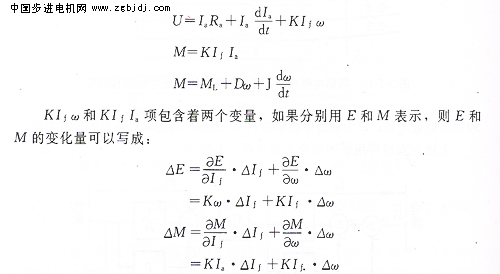
��λ���ŷ�ϵ�y�У������J���ٶ�ƽ��ֵ���㡣�˕r�������Ϸ��̿ɵã�
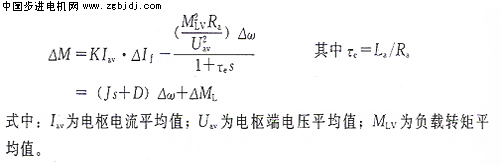
��ʽ�ÿ�D��ʾ��Ҋ�D3-1-21.
��Mav=0�r���t�D3-1-22׃�ɈD3-1-21.
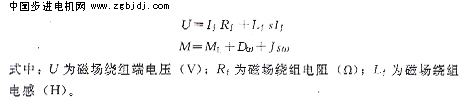
d.늙C�U��C���ƕr�ӑB���ԡ�늙C�U��C���ƕr�ĄӑB����Ӌ�㣬����f������횿��]�Դ��Ӱ� ��������늙C�U��C�Ŀ�����rҊ�D3-1-23��Ҫ�Ѱl늙C늘�늸к����ֱͬ���ŷ�늄әC��һ�]��

���O늄әC�Ķ�늉����ڰl늙C��늉�������
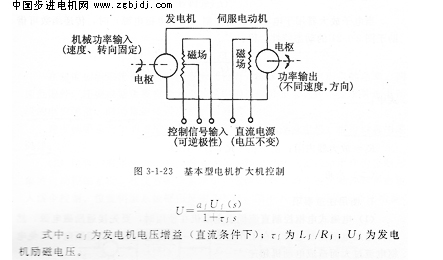
늄әC�ٶ�w���l늙C�ň�늉���ؓ�d�D��֮�g�Ă��f����������ʽ�o����
R��늄әC�Ͱl�әC����裻D�����㵽늄әC�S�Ͽ�ճ�����᳣����
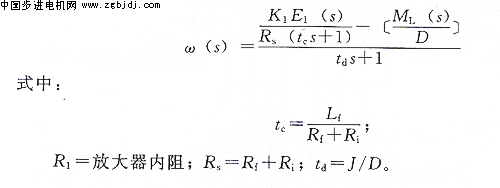
��ӷŴ������ƕr�ӑB���ԡ���ӷŴ�������늄әC늘п��ƕr������һ����Ч늉�Դ��U=KiEi����һ���̶����Ri������ʾ�����������늄әC늘����ֵ��R=Ra+Ri�r���t늄әC�Ă��f��������ʽ��3-1-3��ֱ�ӵõ���

���ӷ��ŗ�����늄әC�ň����ƣ��̶�늘��Դ���r�����f�����ɽ����ڈD��3-1-21�ĄӑB���Եã�
|











