����ͬ��늙C(j��)��׃���(q��)��(d��ng)�����^(q��)��(sh��)�F(xi��n)�·���
�n�h���R���䣬�O�y����������
���������I(y��)��W(xu��)�Ԅ�(d��ng)���W(xu��)Ժ������710072��
ժҪ��ᘌ�(du��)����ͬ��늙C(j��)�����ŷ�����ϵ�y(t��ng)����׃��ͬһ������¹��ʹܴ��ڵ�ֱͨ��(w��n)�}���͂��y(t��ng)�����^(q��)��Ӳ���O(sh��)���·�����^(q��)�r(sh��)�g�y���{(di��o)����ȱ�c(di��n)���ڷ������^(q��)�����C(j��)�������Q�����Ļ��A(ch��)�ϣ������һ�N���ڏ�(f��)�s�ɾ���߉����( CPLD)��(l��i)��(sh��)�F(xi��n)���^(q��)�r(sh��)�g�ھ��{(di��o)��(ji��)���·����������ԇ�(y��n)������ԓ������(ji��n)����Ч�����^(q��)�r(sh��)�g�{(di��o)��(ji��)��(zh��n)�_���o(w��)��Ư��
�P(gu��n)�I�~������ͬ��늙C(j��)���ŷ����ƣ���׃�������^(q��)��CPLD
�ЈD���̖(h��o)��TM351��TM341��TP73 �īI(xi��n)��(bi��o)־�a��A ���¾�̖(h��o)��1001-6848(2010)0?-0095-03
1 PMSM�(q��)��(d��ng)������׃��ֱͨ��ԭ��
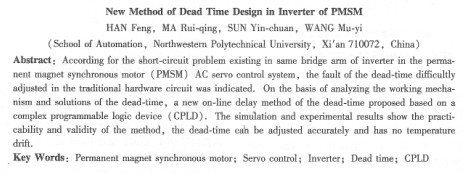
�Dl������PMSM��늉�����׃����?f��)�Y(ji��)��(g��u)�D���D��Vl~ V6������(g��)�����_(k��i)�P(gu��n)�ܣ�A��B��C������ͬ��늙C(j��)���������@�M��ͨ�^(gu��)PWM�}���{(di��o)�Ƽ��g(sh��)��(sh��)�F(xi��n)���ʹܵĿ��ƣ��M(j��n)���(q��)��(d��ng)PMSM���\(y��n)�С����ʹܳ���ICBT����I(xi��n)GBT�����^(gu��)�����������^(gu��)���Լ����^�һ�����F(xi��n)ֱͨ��·�͕�(hu��)���****�ԓp�ģ���ˣ����(q��)��(d��ng)�ͱ��o(h��)�ͳɞ���׃���ܷ�ɿ������Ļ��A(ch��)���P(gu��n)�I��һ��IGBT�Ї�(y��n)��İ�ȫ�����^(q��)(SOA)��������^(gu��)����ĕr(sh��)�g�H��ׂ�(g��)�룬���^(gu��)����������С����˱�횿��]ֱͨ��·��(w��n)�}��
һ����׃���a(ch��n)���^(gu��)�����·��ԭ����ICBT�p�ġ���(n��i)�ÿ��ٻ֏�(f��)���O�ܓp�ġ������c�(q��)��(d��ng)�·���ϡ��ɔ_��������`��(d��ng)�����Լ�ݔ�������e(cu��)��ݔ����(du��)�ض�·��늙C(j��)�^����������׃�����ֱͨ���γɵĶ�·��������׃��ͬһ���ֱͨ��·�����(y��ng)�P(gu��n)ע��ͬһ������¹��ʹ�����һ�r(sh��)�̶����ܴ���ͬ�r(sh��)��(d��o)ͨ�Ŀ����ԣ�ʼ�KҪ̎���_(k��i)�P(gu��n)�����B(t��i)��t�͕�(hu��)�l(f��)�����ֱͨ�F(xi��n)��(d��o)�¹��������ēp�ġ�
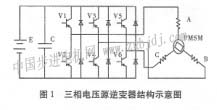
�D2����׃��ͬһ������¹��ʹ�Ql��Q2��������Ʋ��Ρ����ڌ�(sh��)�H��(y��ng)����IGBT���ʹܵ��P(gu��n)����_(k��i)��������һ���ĕr(sh��)�g���t�����_(k��i)ͨ�r(sh��)�g���P(gu��n)���r(sh��)�g���У��_(k��i)ͨ�r(sh��)�g���_(k��i)ͨ���t�r(sh��)�g����������r(sh��)�g֮�ͣ��P(gu��n)���r(sh��)�g���P(gu��n)�����t�r(sh��)�g������½��r(sh��)�g֮�͡�
���]�����ʹ��_(k��i)ͨ���P(gu��n)�����t�r(sh��)�g���t������¹��ʹ��е����������D2��I1��I2��ʾ�����^I1��I2��֪����Tl�r(sh��)�g�Σ�ͬһ������ɂ�(g��)���ʹܣ�һ��(g��)δ��ȫ�P(gu��n)�]�r(sh��)��һ��(g��)���ѽ�(j��ng)�_(k��i)�����t������¹��ʹ���Tl�r(sh��)�g��(n��i)�͕�(hu��)�l(f��)��ֱͨ��·���mȻ��һ��(g��)PWM���ڃ�(n��i)ͬ�r(sh��)��(d��o)ͨ�ĕr(sh��)�gTl�dz��̣����ڹ��ʹ��Е�(hu��)�a(ch��n)���ܴ��������������������ʹܵ�SOA���͕�(hu��)��(d��o)�¹��ʹܟ����������׃��ؓ(f��)�dС�����δ����SOA���֕�(hu��)ʹ���ʹܰl(f��)��a(ch��n)����p�ġ������ڴ���ϵ�y(t��ng)����Ҫ��(du��)IGBT���ʹ��M(j��n)���^(gu��)�����^(gu��)�ᱣ�o(h��)��������Ҫ�ľ��ǘ�����¹��O(sh��)�á����^(q��)���r(sh��)�g�Ա����@�N��r�l(f��)����
2���^(q��)��ԭ�����䌍(sh��)�F(xi��n)����
һ����늉���PWM��׃���У����˱���ͬһ������¹��ʵ�ֱͨ�����Բ��ÃɷN���������{(di��o)���_(k��i)�P(gu��n)�ܻ����{(di��o)��SPWM������̖(h��o)��
��һ�N������Ҫ���{(di��o)���_(k��i)�P(gu��n)�ܵ��]�ϕr(sh��)�g��ʹ���_(k��i)�P(gu��n)�ܵĔ��_(k��i)���]�Ͽ졣
�ڶ��N������������·���a(b��)��PWM������̖(h��o)�����ӡ����^(q��)����ʹֱ��ĸ������(c��)���ʹ��]���cؓ(f��)��(c��)���ʹܔ��_(k��i)֮�g��һ�����ӕr(sh��)���@�ӾͿ��Ա���ͬ�r(sh��)��(d��o)ͨ����(sh��)�`�C���ڶ��N������(ji��n)�η��㡣
�D3�Ǽ������^(q��)��Ŀ�����̖(h��o)��������Σ�������̖(h��o)QDI�cQm,���������c�½���֮�g��ע����һ���ġ����^(q��)���r(sh��)�gTO���@��ͬһ��۵����¹��ʹ�����һ��(g��)��ȫ�P(gu��n)�]�Ժ���һ��(g��)�ŕ�(hu��)��(d��o)ͨ��ͬһ��۵����¹��ʹ�����](m��i)���ཻ�ĵط����Ķ�����(hu��)���F(xi��n)Ҽͨ�F(xi��n)��Ҋ(ji��n)���^(q��)�����������׃����ֱͨ�ṩ����Ч�Ŀ��Ʒ�ʽ��
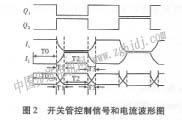
�����^(q��)�����Բ���Ӳ��RC���t�·��(l��i)�a(ch��n)������D4��ʾ��ݔ��ķ�����̖(h��o)INͨ�^(gu��)�ɂ�(g��)�������cRC���t�·�Ժ�ݔ���ķ�����̖(h��o)OUT�������غ��½�������(du��)��̖(h��o)IN����(hu��)��һ�������t�����t�r(sh��)�g����������ݵ�ֵ��(l��i)�Q��(T= RC)��һ��̶���ݸ�׃�����^�����{(di��o)ԇ�����ǣ�ԓ�������t�r(sh��)�g�����ģ����Һ��y�õ���(zh��n)�_���ӕr(sh��)����ˣ�ԓ�����ڌ�(sh��)�H��(y��ng)�������T��㡣
ᘌ�(du��)���y(t��ng)RC���t�·��ȱ�c(di��n)�������漰����������Ӳ���·�Ŀ����ԺͿɿ��ԣ��ֿ˷����䅢��(sh��)�����װl(f��)��ȱ�c(di��n)���ӕr(sh��)�����������ÿɾ���������CPLD����ͨ�^(gu��)ܛ�����̮a(ch��n)�������^(q��)����CPLD��������ܶ�PLD���������(n��i)�����(n��i)�����������ģ������^(q��)���O(sh��)�Ü�(zh��n)�_.
3����CPLD���^(q��)��(sh��)�F(xi��n)����
�D5�����CPLD�ġ����^(q��)����(sh��)�F(xi��n)ԭ����D����PWM��̖(h��o)�l(f��)���·�a(ch��n)����һ��ռ�ձȵ�PWM��()����CPLD����(j��ng)�^(gu��)̎�����ɓ������^(q��)�r(sh��)�g�ă�·��̖(h��o)QD1��QD2��ͨ�^(gu��)�(q��)��(d��ng)�·�������ϡ���۹��ʹܡ�����ͨ�࣬���ڿ�����̖(h��o)����ע�������^(q��)�r(sh��)�g���Ķ�������ͬһ������¹��ʹܵ�ֱͨ����(sh��)�F(xi��n)�����^(q��)���o(h��)��
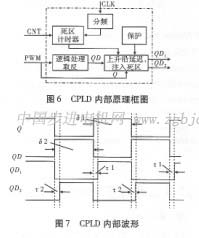
CPLD��(n��i)�����^(q��)�Č�(sh��)�F(xi��n)ԭ��D��D6��ʾ��PWM��ͨ�^(gu��)߉̎������һ·�cPWM����̖(h��o)(Q)��(y��n)���a(b��)����̖(h��o)QD������CPLD�ⲿ���ø߾�����Դ����30MHz)��ͨ�^(gu��)���l�������^(q��)Ӌ(j��)��(sh��)���ĕr(sh��)���̖(h��o)���ٸ���(j��)��λ�C(j��)Ӌ(j��)��C(j��)(��DSP)����CPLD��(n��i)���O(sh��)�������^(q��)�r(sh��)�g������(CNT)����CPLD��(n��i)���քe��(du��)Q��QDע�����^(q��)�r(sh��)�g��׃�Ƀ�·�(q��)��(d��ng)��̖(h��o)QD1��QD2���@��ֻҪ��׃���^(q��)�r(sh��)�g�����ּ��ɿ������^(q��)��С��

���^(q��)�r(sh��)�g��ע���ǰ���?q��ng)D7��ʾ�ķ�ʽ��(l��i)��(sh��)�F(xi��n)�ģ�Q��QD�ǽ�(j��ng)�^(gu��)߉̎�����(y��n)���a(b��)��PWM��������(j��)��λ�C(j��)����DSP����ݔ?sh��)����^(q��)�r(sh��)�g������CNT����(du��)�ɂ�(g��)��̖(h��o)�M(j��n)��������̎����ʹ���������طքe�ӕr(sh��)Tl��T2����ݔ�����½��ز����κ�̎�����ӕr(sh��)�r(sh��)�gTl��T2�����ɿ�����CNT�Q�����߃�(n��i)���O(sh��)���̶��ӕr(sh��)���@��ͬһ������¹��ʹܵĿ�����̖(h��o)�����غ��½��طքe����Tl��r2�����^(q��)�r(sh��)�g�������_(k��i)ͨ�r(sh��)�gton���P(gu��n)���r(sh��)�gtoff��ͬ��һ����r�����^(q��)�r(sh��)�gȡ�^���ֵ����ȡr1 =r2=r��ͨ�^(gu��)ע�����^(q��)��QD1���}������9���}���pȥ���^(q��)�r(sh��)�g����bl -7��QD2���}������QD���}���pȥ���^(q��)�r(sh��)�g�����̑�(y��ng)���У����^(q��)һ������0 5����ԣ����
4 Quartusll�����ԇ�(y��n)
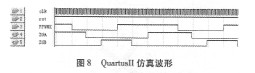
���ڱ�ϵ�y(t��ng)����(du��)���^��(f��)�s������ȫ��λӲ�������Z(y��)��( VHDL)��Quatrusllܛ��ƽ�_(t��i)���M(j��n)�з��棬ԓ�Z(y��)�Բ������****�Z(y��)�Ե��Z(y��)���ʽ����Ɍ�(du��)Ӳ���О���������߂����(qi��ng)��ģ�K�����������и��õĿ��x�Ժ���ֲ�ԣ��dz������ڹ����O(sh��)Ӌ(j��)���_(k��i)�l(f��)���D8���������ԭ����Quatrusll���沨�Σ�
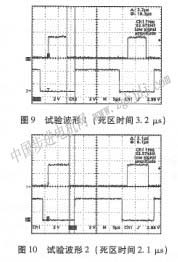
�ڈD8�У�clk���ⲿ�߾�����Դ����ĕr(sh��)���̖(h��o)��rst���(f��)λ��̖(h��o)������Ч����PPWMK��PWM����ZGA��ZGB��ע�����^(q��)���PWM�������^(q��)�r(sh��)�g��9ns�����沨�κ���S�����Ǻϣ��(y��n)�C��ԓ�����Ŀ����ԡ��D9�͈D10�քe��3.2��1.3���^(q��)�r(sh��)�gԇ�(y��n)���Ρ�
5�Y(ji��)Փ
�����ڷ���PMSM���ŷ�����ϵ�y(t��ng)��׃��ֱͨ�a(ch��n)����ԭ����Ӳ����Q�����Ļ��A(ch��)�ϣ������һ�N����CPLD�ġ����^(q��)���a(ch��n)���ŷ����������^(q��)����С��ͨ�^(gu��)��λӋ(j��)��C(j��)����DSP���ھ��{(di��o)��(ji��)�������ԇ�(y��n)�(y��n)�C������ԓ������(sh��)�F(xi��n)��(ji��n)����Ч�����^(q��)�r(sh��)�g�ɿأ���(zh��n)�_���o(w��)��Ư�����й��̌�(sh��)�H���x��
|