ֱ���D(zhu��n)�ؿ���ϵ�y(t��ng)�ăɷN�ٶȹ�Ӌ�����^�о�
�����£��Y����
����������WԺ늚���c�Ԅӻ�ϵ�����471023��
ժҪ������ȫ�A����]�h(hu��n)�^�y���Ԍ��F(xi��n)ֱ���D(zhu��n)�ؿ���ϵ�y(t��ng)���Ӵ�朵Ĝʴ_�^�y���ڴ˻��A(ch��)���ƌ��˃ɷN�ٶȹ�Ӌ�������������ɷN�ٶȹ�Ӌ�����ȷ���͌�����͌��Y(ji��)������������(j��)ģ�ͅ������m��(y��ng)��Փ�O(sh��)Ӌ�����ٶȹ�Ӌ��������(j��)����Z����Փ��(g��u)����ٶȹ�Ӌ�����R�ٶ��Ք��죬�ӑB(t��i)���ܸ��á�
�P(gu��n)�I�~�������Б�(y��ng)늄әC��ֱ���D(zhu��n)�ؿ��ƣ��ٶȹ�Ӌ�̣�ģ�ͅ������m��(y��ng)
�ЈD���̖��TP271 �īI��־�a��A ���¾�̖��1001-6848{2010)02-0066-04
O�� ��
���˝M������ܽ������ӵ���Ҫ����Ҫ���ٶ��M���]�h(hu��n)���ƣ����ٶȂ������İ��b������ϵ�y(t��ng)�ď��s�ԣ�������ϵ�y(t��ng)�Ŀɿ��Ժ�ϵ�y(t��ng)�������ԣ���������ϵ�y(t��ng)�ɱ��;S�oҪ����ˣ����ßo�ٶȂ������ѽ�(j��ng)��δ�������{(di��o)�ٰl(f��)չ�ı�Ȼڅ�ݡ���ֱ���D(zhu��n)�ؿ���ϵ�y(t��ng)�У�����ȫ�A����]�h(hu��n)�^�y��ȡ�����y(t��ng)�ķe����������ˌ����Ӵ�朵��^�y���ȣ�ͬ�r���ӌ�늙C����(sh��)�������ԡ���ȫ�A����]�h(hu��n)�^�y���Ļ��A(ch��)�ϣ��O(sh��)Ӌ�˃ɷN�ٶȹ�Ӌ����һ�N������(j��)����Z����Փ�O(sh��)Ӌ�����ٶȹ�Ӌ�^�y�����ڶ��N������(j��)ģ�ͅ������m��(y��ng)��Փ�O(sh��)Ӌ�����ٶ����m��(y��ng)�^�y��������MATLAB���ɷN�ٶȹ�Ӌ��ֱ���D(zhu��n)�ؿ���ϵ�y(t��ng)�M���˷��挍�F(xi��n)��ͬ�r���M�Ќ��������ͷ���Y(ji��)���M���ˌ��ȷ�����
1 ֱ���D(zhu��n)�ؿ���ϵ�y(t��ng)ȫ�A����]�h(hu��n)�^�y���ĄӑB(t��i)��(sh��)�Wģ��
1��1����늄әC�ڃ����oֹ����ϵ�µĄӑB(t��i)��(sh��)�Wģ��
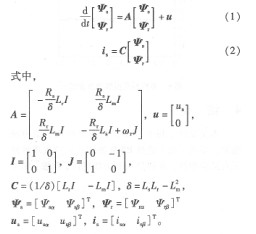
�Զ����D(zhu��n)�Ӵ�朞��B(t��i)׃���ľ����ʽ늄әC��(sh��)�Wģ�����£�
늴��D(zhu��n)�ر�ʾ�飺
1. 2ȫ�A����]�h(hu��n)�^�y���ĄӑB(t��i)��(sh��)�Wģ��
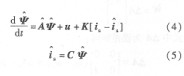
ͨ�^ʽ(1)��ʽ(2)�������Į���늄әC�����ʽ늙C��(sh��)�Wģ��һ��B(t��i)���̣����Ԙ�(g��u)���ͬ�r�^�y���Ӵ�机Ͷ��������ȫ�A��朠�B(t��i)�^�y��[4]��
�@�
�������_ʽ�У������^�y���Ĺ�Ӌֵ��U�Ǡ�B(t��i)�^�y����ݔ�룬ݔ����is��K�����^�y�������ꇡ��^�y�������һ��ǰ����^�y���ݔ���c늙C�挍���ݔ��������헡�������K�ә�(qu��n)��ꇵ����ã����������^�y���õĶ����D(zhu��n)�Ӵ�朠�B(t��i)׃�������^�y��ģ��ʹ�õľ��A�͌��Hϵ�y(t��ng)�ľ��A֮�g���ڲ�r����Ȼ�������^�y��ݔ���c���Hݔ��֮�g����ƫ��ڴ���r�£�ԓ���ӵ�����헌��Mһ��У���@ЩӰ푡���ʽ���^�y�������ÿ��Ա�ʾ�����¾����ʽ��
2�ɷN�ٶȹ�Ӌ��
2.1��������Z����Փ���ٶȹ�Ӌ��
�D(zhu��n)�٦ئ��ǙCе׃���������Cе�D(zhu��n)�٦ئ�׃���h�h�������׃�����ٶȕr�����Ԍ��Cе�D(zhu��n)�٦ئ�ҕ������(sh��)����(j��)�ˣ�����(j��)����Z����Փ�ƌ����D(zhu��n)�٦ئ����m��(y��ng)�Ք��ʣ���ʹϵ�y(t��ng)���ַ�(w��n)����
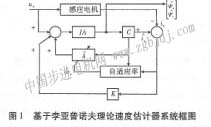
�D1���������Z����Փ���ٶȹ�Ӌ��ϵ�y(t��ng)��D�����]����Ӌ�D(zhu��n)���c���H�D(zhu��n)��֮�g���ڵ�ƫ������D(zhu��n)�Ӵ�朌��Hֵ�c����ֵ֮�g�ĄӑB(t��i)�`��̿���ͨ�^늄әC��B(t��i)�����cȫ�A��朠�B(t��i)�^�y���IJ�ֵ����ʽ(1)�pȥʽ(4)Ӌ��õ���
AA���`���ꇣ�
�Dl��������Z����Փ�ٶȹ�Ӌ��ϵ�y(t��ng)��D���x����Z��(sh��)���£�
�@�������һ������(sh��)������
ͨ�^������Z��(sh��)(9)���r�g�����\�㣬���J��δ֪����(sh��)�D(zhu��n)�٦ئ�׃�����������ƞ鳣��(sh��)���ɵã�
��(j��ng)�^�ƌ��ɵã���ʽ�У�

��ô����ʽ׃?y��u)?/DIV>
�t���Եõ�늙C�D(zhu��n)�ٵ����m��(y��ng)�Ք��ʣ�
���ھ��j1�Ƿ��殐��ꇣ���ô���I(A -KC)T��(A-KC)������ֵ����ͬ�ģ��������x����m���^�y��������K��ʹ�þ��(A-KC)�M��ؓ�붨�ėl�����t�����������m��(y��ng)������(g��u)�ɵ��ٶȹ�Ӌ�����Ƿ�(w��n)���ġ�
��ˣ�����ʽ(11���������m��(y��ng)�ʣ�����ʹϵ�y(t��ng)���ַ�(w��n)�������˝M��ϵ�y(t��ng)�ĄӑB(t��i)���ܵ�Ҫ���Բ���ʽ(12)��ʾ�ı����e����ʽ���ٶ����m��(y��ng)�ʣ�
��ʽ�У�Kp��Ki�քe�DZ����ͷe��ϵ��(sh��)��
2.2����ģ�ͅ������m��(y��ng)��Փ���ٶȹ�Ӌ��
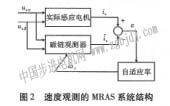
�D2�Dz���ģ�ͅ������m��(y��ng)( MRAS)��Փ�O(sh��)Ӌ����һ�N���m��(y��ng)�ٶȹ�Ӌ������늙C�Č��Hģ�����酢��ģ�ͣ�ͬ�r��ǰ���O(sh��)Ӌ��ȫ�A��朠�B(t��i)�^�y���������{(di��o)ģ�ͣ���ô�����D(zhu��n)�١��c���H�D(zhu��n)�٣���ƫ���Ȼ�����ɂ�ģ�͵�ݔ�������ƫ���(j��)�ˣ�늙C�����D(zhu��n)��CO�������m��(y��ng)�ʿ��Ը���(j��)�����ɂ�ģ�͵�ݔ�������ƫ��õ�������
��ʽ�У�Kp��K1�քe�DZ����ͷe��ϵ��(sh��)��ʽ(14)��ʾ�������D(zhu��n)�����m��(y��ng)�Ք����Բ���ǰ����Ƶķ���ͨ�^���ɷ�(w��n)������Փ�����C����
ͨ�����D(zhu��n)�٦ئ���׃����ʽ(1)��������늙Cģ���Ǿ��ԕr׃ϵ�y(t��ng)��Ȼ�����D(zhu��n)��m����׃���ٶ��h�h���������׃���ٶȕr�������J�鳣��(sh��)��늙C�Ķ������Rs���D(zhu��n)�����R���S�ضȾ���׃����Ҳ���Կ�������(sh��)����(j��)�ˣ�����(j��)������(w��n)����Փ�ƌ����D(zhu��n)�٦ئӵ��������m��(y��ng)�Ք��ʣ���ʹϵ�y(t��ng)���ַ�(w��n)����B(t��i)��
���R�D(zhu��n)���c���H�D(zhu��n)��֮�g��ƫ���Ȼ���¶����D(zhu��n)�Ӵ�朵Ĺ���ֵ�c���Hֵ֮�g���`���ô�����ĄӑB(t��i)�`��̿���ͨ�^����ģ���c���{(di��o)ģ�͵IJ�ֵ����ʽ(1)�pȥʽ(4)Ӌ��õ���
�@�W�ǷǾ��ԕr׃ͨ������
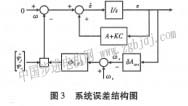
�@�捻�ئӞ錍�H�D(zhu��n)���c��Ӌ�D(zhu��n)�ٵ�ƫ�ʽ(15)������ϵ�y(t��ng)�`��Y(ji��)��(g��u)���Ա�ʾ��D3����ʽ��ϵ�y(t��ng)�ɾ��Զ�����ǰ��ͨ���ͷǾ��Եķ���ͨ����ͬ��(g��u)�ɣ���(e)���D(zhu��n)�٦ئӵ����m��(y��ng)���R�ʡ��`��ϵ�y(t��ng)�u�M��(w��n)���ėl���ǣ�ϵ�y(t��ng)��ǰ��ͨ���LJ��������ģ����ҷǾ��Է���ͨ����ݔ���ݔ���M�㲨����(w��n)���ėl��������
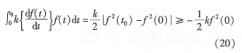
���ڷǾ��Է���ͨ���������C��ǰ��ͨ�����  �LJ��������ģ��@�ﲻ��ʽ(17)�����Mһ���ƌ����£� ����(j��)����IJ���ʽ��
����֪��������ʽ(21)��ʾ���D(zhu��n)�ٵı��R�ʣ�����ʹʽ(19)�M�㲨��������
�@�X�����ⳣ��(sh��)������ʽ(21)����ئӵ����m��(y��ng)�ʣ�����ʹϵ�y(t��ng)�M�㷀(w��n)���l�������˝M��ӑB(t��i)���ܵ�Ҫ�e����ʽ���D(zhu��n)�����m��(y��ng)��(21)���Ը���ʽ(22)��ʾ�ı����e����ʽ�����m��(y��ng)��[6]��
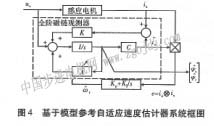
���������m��(y��ng)�ٶ��^�y���cȫ�A����]�h(hu��n)�^�y���Y(ji��)����һ��㘋(g��u)���˵ڶ��N�ٶ����m��(y��ng)�^�y������D4����
3����͌��Y(ji��)������
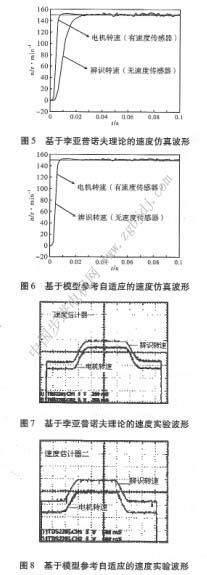
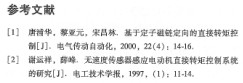
���ٶȹ�Ӌ���ĄӑB(t��i)푑�(y��ng)���沨��(�D5�͈D6��������������Z����Փ�ٶȹ�Ӌ���ı��R�D(zhu��n)�����Ҳ��Ҫ20 ms��ۙ���Ք����挍�D(zhu��n)�٣�������ģ�ͅ������m��(y��ng)�ٶȹ�Ӌ���ı��R�D(zhu��n)�َ�ͬ�r��ۙ���Ք����挍�D(zhu��n)�٣����ٶȹ�Ӌ���ĄӑB(t��i)푑�(y��ng)���Σ��D7�͈D8������������ģ�ͅ������m��(y��ng)�ٶȹ�Ӌ���ı��R�D(zhu��n)��Ҳ�Ȼ�������Z����S�ٶȹ�Ӌ���ı��R�D(zhu��n)���Ք��죻����Y(ji��)���͌��Y(ji��)��һ�¡���ˣ��ɷ���͌��Y(ji��)����֪�����û���ģ�ͅ������m��(y��ng)�ٶȹ�Ӌ������(g��u)�ɵğo�ٶȂ�����ֱ���D(zhu��n)�ؿ���ϵ�y(t��ng)�c���û�������Z����Փ�ٶȹ�Ӌ����(g��u)�ɵ�����(y��ng)ϵ�y(t��ng)��ȣ����R�ٶ��Ք��죬�ӑB(t��i)���ܸ��á�
|