�в�����늙C����Ԫ���m������
����ꖣ�ʷ���ƣ�������
�����ϿƼ���W�Ԅӻ�ϵ�����471003��
ժҪ�����ڳ���늙C���зǾ��ԡ��r׃�ԡ�����ϵ����c�����������Ŀ����y�ȣ�����PID�ȳ�Ҏ���Ʒ����y�ԝM���^�߾��ȵĿ���������Ԫ����һ�N�W�j������ʽ�������ԌW�������m���������������ڌ��F���OӋ�˻��ڵ��lPWM�����Ć���Ԫ���m��PID�D�ٿ��Ʋ��ԣ������˳���늙C���m���]�h�����b�á���һ���̶��Ͻ�Q���yPID�{���������ھ����r�����������y�ڌ����s���ƌ����M����Ч���ƵIJ��㡣����C����ԓ����ϵ�y����푑�Ѹ�١��m���ԏ��ȃ��c��
�P�I�~������늙C������Ԫ�����m�����ƣ����lPWM
��Ȧ���̖��TM359.9 �īI��־�a��A ���¾�̖��100l-6848��2,010��02-0044-03
0�� ��
����늙C( USM)��һ�N������늙C�������䲻ͬ�ڂ��y늙C���T�����c��ʹ���ڷ��B�m�\�Ӽ������\�ӿ����I����ЏV韵đ���ǰ��������늙C���Ƀ����ֵ��ȡ���λ��һ���90�ȵĸ��l����늉��ӵġ��ӿ��Ɔ�Ԫ������ֱ��Ӱ푳���늙C�����ܣ�ģ�������m�����W�j�ȿ��Ʒ��������ё����ڳ���늙C���ơ�
���lPWM���Ʒ�ʽ�dz���늙C���Ƶ�һϡ��˼·��������ͨ�^��׃늙Cݔ��늉����l�ʡ���ֵ����λ�팍�F�D�ٿ��NĿ�ģ����Dz�����늉���ͨ����ƣ��܉�늙C�����^�̵ķǾ����Pϵ�����IJ����@�N���Ʒ�ʽ�����F�˳���늙C�D�ٿ���ϵ�y�����ڳ���늙C���D���cݔ����������зǾ����Pϵ�͕r׃�ԣ����Â��yPID���Ʋ���ȡ�úܺõĿ���Ч��������Ԫ���阋���W�j�Ļ�����λ�������ԌW�������m�����������ҽY�����Ρ������ھ����F�����y��PID�{����Ҳ���нY�����Ρ��{����������c���������ھ����r�������������IJ��Æ���Ԫ���m��PID�����㷨���уɷN���Ʋ��Եă��c�Y�������OӋ�˳���늙C�D�ٿ����b�ã������ϵ�y���m�������������˿���Ч����
1�ӿ���ϵ�y
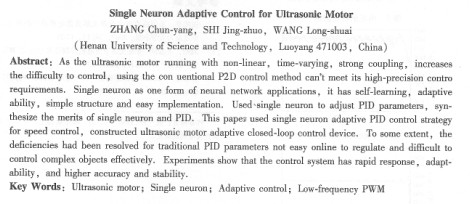
���ĸ�������늙C����Ҫ���OӋ��һ�N����ֱ�Ӕ��ֺϳɼ��g( DDS)�ij���늙C�ӿ��������Y����D��D1��ʾ����DSP����ĵĿ��Ɔ�Ԫ��Ҫ���F���ơ�Ӌ��͔����IJɼ����ܣ���CPLD����ĵĈ��І�Ԫ������̖�l����������DSP�Ă��͵�ָ������a������늙C�в�����늙C����Ԫ���m�����Ə���ꖣ��������PWM��̖�����ӆ�Ԫ���F����·���QPWM��̖�����ڃ���������׃�·��ƥ���·��ݔ������һ����ֵ���l�ʺ���λ��ă�������늉��ӳ���늙C��CPLD���OӋ��SPIͨӍ�˿ڣ�DDS��̖�l�������l�ʡ���λ����ֵ������ͨ�^DSP��SPI�˿��M��ͨӍ��������DSP�ă�λͨ��GPIO������DDS�l�ʡ���λ���ֵ�����ֵ��x��ˣ����R�e���Ϳ����ֵ���͡�
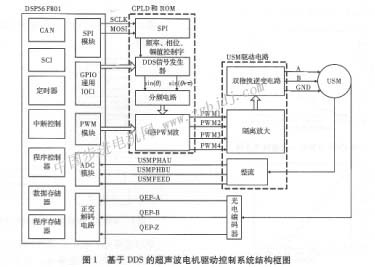
�D2�o���˻���DDS�Č��QPWM��̖�l����Ԫ��ԭ��D��ͨ�^�O��DSP��PWMģ�Kģֵ�Ĵ���PWMCM��Ӌ��ֵ�Ĵ���PWMVAL����DSP�a���ĵ��lPWM��̖����PWM���c���QPWM��̖���c�����Ɍ��F���lPWMͨ����ơ�
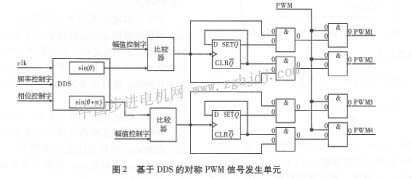
�D3���D4�քe�o����ԓ�ӿ���ϵ�y���l��һ�D�١����lPWMռ�ձ�һ�D������������
2����Ԫ���m�����ƽY��
���y����ʽPI�{�������㷨��
���ڂ��y��PI����PID�{�������䅢���ڳ�ʼ���r�ѽ��O�úã��������ھ���������ˮ����ƌ���l��׃���r���Ͳ��܌����ƌ����M�кܺõĸ�ۙ�����IJ��Æ���Ԫ���m���㷨�팍�FPID�������ھ��{��������ʹPID�{�����ą����S���،����׃����׃�����@��������Ԫ�����ԌW�����裬���\���п��Ը������،����׃��������Ԫ�ę�ֵ�M���{����ʹ��PID�������������m�����ܡ�
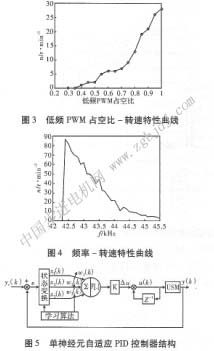
����Ԫ���m��PID�Y����D��D5��ʾ���D��yr(K)��y(k)�քe����������O��ֵ��ݔ���� X1 (k)��X2(k)��x3��k���քe����Ԫ�W����������Ҫ�Ġ�B׃����
�D5����Ԫ���m��PID�������Y��������㷨�飺
ʽ(3)�У�u(k)��u��k-l�������׃����K�����ԪPID�Ŀ��ƅ������档ʽ(4)�У�w1(k)�քe��e��헡�����헡���헵ę�ֵ����Ԫ��ͨ�^��ֵ���{���팍�F�ԌW�����ܵġ���ֵ�{�����Բ��ò�ͬ�ČW��Ҏ�t���Ķ����ɲ�ͬ�Ŀ����㷨������USM���ƵķǾ������c�����IJ������бO����Hebb�W���㷨�����w�飺
ʽ(5)�Ц�1����p����D��e�֡��������ֵČW�����ʣ�z(k)=x1(k)=yr(k)һy(k)=e(k)��������ָ�ˡ�
3 ����Ԫ���m�������㷨���OӋ�c���F
�D6�o���ˆ���Ԫ���m��PID�����㷨�ij������̈D��
�W�����ʦ�1����p����D����ԇ��^���д_���ġ����ȴ_���e��헌W����������������ֵ�x��W�����ʣ�Ȼ���M��ԇ�^�췀�B�^�̣������B�^��늙C�D�ٲ����^�t�m�����͌W�����ʦ�1������ۙĿ���D���^�����t��Ҫ�m����ߌW�����ʦ�1�M�ж��ԇ�_���˷e��헌W�����ʦ�1=0. 0545��
Ȼ�_������헌W�����ʦ�p���̶���1��׃���������ֵ�x�����헌W�����ʦ�p���M��ԇ�^��ӑB푑��^�̣������F��ʎ���{�^�t���ͱ���헌W�����ʣ���ӑB푑��^�����t���������헡��M�з���ԇ�_���˱���헌W�����ʦ�p=0. 25��
�ٴΣ��_����헌W�����ʡ��̶���1����p��׃���������ֵ�x����헌W�����ʦ�p���M��ԇ�^��ӑB�ͷ��B�����Ƿ�õ�һ���ĸ��ƣ������F��ʎ���t���Ϳɡ������η���ԇ����x���D=0 45��
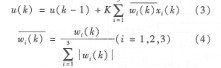
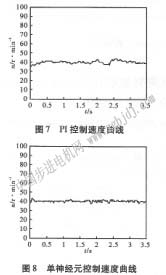
����t���OӋ��USM60-3�в�����늙C�M�п��ƣ�늙C���gָ�����£��⏽60 mm���~������7W�����·ݔ��늉�DC 12 V���D7���D8�քe�o�����D�ٽo��ֵ��40 r/min��PI���ƺ͆���Ԫ���Ƶ��ٶȌ��������
���Y������������Ԫ�u�m�����ƿ����^�õ،��F�D�ٸ�ۙ�������˂��yPI���ƵIJ��㣬ϵ�y���^�����m���ԣ��ӑB�ͷ��B���ܶ����^��ĸ��ơ�
4�YՓ
�����漰�˙C��DDS�ij���늙C�ӿ����b�ã����F�˻��ڵ��lPWM�ij���늙C����Ԫ���m�����ƣ�����PI���Ʒ����M�б��^���Y���C��������Ԫ���m�����ƾ��нY�����Ρ��W���㷨���_��Ӌ����С�����ڌ��F�ȃ��c�������_���^�ߵĿ��ƾ��ȣ����Ҿ����^�õĄӑB�ͷ��B
���ܡ�
|