╗∙ė┌│¼ĘĆČ©ąįĄ─╗ņ║Ž┤┼ĖĪŽĄĮy┐žųŲŲ„įOėŗ
└ŅįŲõōŻ¼ĻÉśõ╬─Ż¼ĻÉ╗█ąŪ
Ż©ć°Ę└┐Ų╝╝┤¾īW┤┼æęĖĪųąą─Ż¼║■─ŽķL╔│410073Ż®
š¬ ꬯║ßśī”ļŖ┤┼ė└┤┼╗ņ║Žą═EMS┤┼ĖĪ┴ą▄ćæęĖĪ┐žųŲųąę“ģóöĄ┤ķäėę²ŲĄ─▓╗┤_Č©ąįå¢Ņ}Ż¼V POPOV│¼ĘĆČ©└Ēšō×ķ╗∙ĄAįOėŗ┴╦─Żą═ģó┐╝ūį▀mæ¬æęĖĪ┐žųŲŲ„ĪŻĖ∙ō■ŽĄĮyĘŪŠĆąį─Żą═║═æęĖĪ┐žųŲĄ─ąį─▄ųĖś╦ę¬Ū¾┤_Č©┴╦ŽĄĮyĄ─ģó┐╝─Żą═ĪŻ×ķ┴╦ØMūŃPOPOVČ©└ĒĄ─Śl╝■Ż¼įOėŗ┴╦Ū░Ž“čaāöŲ„Ż¼Ą├ĄĮ┴╦▒╚└²ĘeĘųūį▀mæ¬┬╔ĪŻĮY║Ž╗ņ║ŽŽĄĮyīŹļHĄ─┐žųŲ╠ž³cī”ūį▀mæ¬┬╔▀Mąą┴╦║å╗»▓óĘų╬÷┴╦ŲõĘĆČ©ąįĪŻĘ┬šµ┼cīŹ“×ĮY╣¹▒Ē├„Ż¼▓╔ė├ūį▀mæ¬ÖCųŲ║¾Ż¼ŽĄĮyĄ─äėæBĒææ¬▀^│╠ŲĮĘĆŻ¼į┌ķgŽČļA▄SĢr▒Ē¼F│÷ĘĆĮĪąįŻ¼Å─Č°─▄Ė─╔Ų┤┼æęĖĪŽĄĮyĄ─ąį─▄ĪŻ
ĻPµIį~Ż║╗ņ║ŽæęĖĪŻ╗│¼ĘĆČ©Ż╗ūį▀mæ¬┐žųŲ
ųąłDĘųŅÉ╠¢Ż║TP 273 ╬─½Iś╦ūR┤aŻ║A
1ę²čį
ļŖ┤┼ė└┤┼╗ņ║ŽæęĖĪ╝╝ągė╔ė┌æęĖĪ╣”║─ąĪĪóī”▄ć▌dļŖį┤╝╝ągę¬Ū¾Ą═Īó│ą▌d▒╚Ė▀Ą╚ā׳cŻ¼│╔×ķ«öŪ░ą┬ą═┤┼æęĖĪ蹊┐ŅIė“Ą─¤ß³cų«ę╗ĪŻĮøĄõĄ─PID║═śO³c┼õų├Ą╚ŠĆąį┐žųŲĘĮĘ©ų╗─▄▒ŻūCŽĄĮyį┌ŲĮ║Ō³cĖĮĮ³Š▀ėą▌^║├Ą─äėæBąį─▄Ż¼«ö│ą▌d┘|┴┐ūā╗»Č°ī¦ų┬ŽĄĮy▌^┤¾ĄžŲ½ļxŲĮ║Ō³cĢrŻ¼ŽĄĮyĄ─æęĖĪąį─▄īó├„’@É║╗»ĪŻ─Żą═ģó┐╝ūį▀mæ¬┐žŲ╩( MRAC)ĘĮĘ©Ė∙ō■ŽĄĮyĀŅæB║═▌ö│÷š`▓Ņš{š¹┐žųŲģóöĄŻ¼╩╣īŹļHŽĄĮy½@Ą├┼cģó┐╝─Żą═Ą╚═¼Ą─ąį─▄ĪŻPOPOV│¼ĘĆČ©└Ēšō╩Ū▀Mąąūį▀mæ¬┐žųŲįOėŗ║═Ęų╬÷Ą─ųžę¬ĘĮĘ©Ż¼┼c└Ņč┼ŲšųZĘ“įOėŗĘĮĘ©ŽÓ▒╚Ż¼▀@ĘNĘĮĘ©─▄Ą├ĄĮĮYśŗ║åå╬Īó┐╔š{ģóöĄ╔┘Ą─MRACŽĄĮyŻ¼▒Ńė┌╣ż│╠æ¬ė├ĪŻ
×ķ▒ŻūC╗ņ║Ž┤┼ĖĪŽĄĮyį┌│ą▌d┘|┴┐ūā╗»Ū░║¾Ą─æęĖĪąįę╗ų┬Ż¼▒Š╬─╗∙ė┌POPOV│¼ĘĆČ©└ĒšōįOėŗ┴╦─Żą═ģó┐╝ūį▀mæ¬┐žųŲŲ„Ż¼Å─╣ż│╠æ¬ė├Ą─ĮŪČ╚║å╗»┴╦┐žųŲŲ„ĮYśŗĪŻ
2╗ņæꎥĮyĮ©─Ż╝░ģó┐╝─Żą═Ą─▀x╚Ī
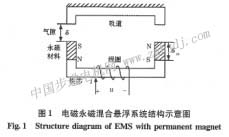
1)╗ņæꎥĮyĄ─ĘŪŠĆąį─Żą═ ļŖ┤┼ė└┤┼╗ņ║Ž┤┼ĖĪŽĄĮyŻ¼╚ńłD1╦∙╩ŠĪŻ
ŲõĘŪŠĆąį─Żą═×ķ
╩ĮųąŻ¼g×ķųž┴”╝ė╦┘Č╚Ż╗ĖžĪŻ×ķšµ┐š┤┼ī¦┬╩Ż╗ĖžĪŻ×ķė└┤┼▓─┴ŽĄ─ŽÓī”┤┼ī¦┬╩Ż╗├¾×ķė└┤┼│CŅB┴”Ż╗5×ķĄ╚ą¦┤┼śO├µĘeŻ╗ó¶×ķļŖ┤┼ŠĆ╚”įčöĄŻ╗6Ż¼ĪŻ×ķė└┤┼ĶFķLČ╚Ż╗6×ķæęĖĪķgŽČŻ╗R×ķŠĆ╚”ļŖūĶŻ╗Ī░×ķŠĆ╚”ā╔Č╦ļŖē║Ż╗i×ķŠĆ╚”ļŖ┴„Ż╗m×ķæęĖĪ┘|┴┐Ż╗FĪŻ×ķ┤┼┴”ĪŻ
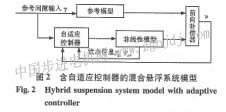
2)ģó┐╝─Żą═Ą─▀x╚Ī└¹ė├┐ņ╦┘ļŖ┴„Łh╠ß╔²ļŖ┴„Ą─Ė·█Ö╦┘Č╚ĪŻĪ░Ż¼═¼Ģrį┌┴ŃļŖ┴„ŲĮ║Ō³c(6ĪŻŻ¼iĪŻ)(iĪŻ=o)▀Mąą╠®└šš╣ķ_Ż¼Ą├ĄĮŽĄĮyĄ─ŠĆąįé„▀f║»öĄ×ķ
Ė∙ō■╩Į(4)┐╔ų¬Ż¼┐ņ╦┘ļŖ┴„ŁhĄ─ę²╚ļ╩╣Ą├įŁŽĄĮyĮĄļA×ķČ■ļAŽĄĮyĪŻī”ė┌Č■ļAŽĄĮyČ°čįŻ¼ų„ꬥ─ųĖś╦╩ŪūĶ─ßf║═ŅlĦmŻ¼╚Īģó┐╝─Żą═×ķ
3 ╗∙ė┌POPOV└ĒšōĄ─┐žųŲŲ„įOėŗ
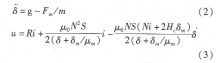
1)ūį▀mæ¬┐žųŲŲ„ĮYśŗ║¼ūį▀mæ¬┐žųŲŲ„Ą─æęĖĪŽĄĮy─Żą═Ż¼╚ńłD2╦∙╩ŠĪŻ
╣„ō■╩Į(4)Ż¼╩Į(5)┐╔ų¬Ż¼╗ņ║Ž┤┼ĖĪŽĄĮy╩Ū¤o┴Ń³cŽĄĮyŻ¼ę“Č°ūį▀mæ¬┐žųŲŲ„Ą─įOėŗ┐╔┐╝æ]▓╔ė├š{╣ØŪ░ü║═Ę┤üčaāöŠWĮjĘĮĘ©▀_ĄĮĄ╚ą¦š{╣Øī”Ž¾ģóöĄĄ──┐Ą─ĪŻĖ∙ō■│¼ĘĆČ©Č©└ĒĄ─ę¬Ū¾Ż¼Ū░Ž“ĘĮēK▒žĒÜ╩Ūš²īŹĄ─Ż¼▀x╚Ī╚ńŽ┬Ą─Ū░Ž“čaāöŲ„Ż║
į┌┤┼æęĖĪ┐žųŲųąŻ¼ę¬Ū¾Ą─┐žųŲ─┐ś╦═©│Ż×ķČ©ļŖ┴„╗“š▀Č©ķgŽČ┐žųŲŻ¼ĮY║ŽPOPOV│¼ĘĆČ©└ĒšōĄ─┐žųŲŲ„įOėŗŻ¼▀xė├▒╚└²ĘeĘųūį▀mæ¬┬╔Ż¼ätĘ┤üčaāö┐žųŲ┬╔×ķ
į┌▀@éĆūį▀mæ¬┬╔ųąŻ¼øQČ©┴╦eĄ─╩šö┐╦┘Č╚ĪŻį┌īŹļHĄ─┤┼æęĖĪ┐žųŲųąŻ¼╬╗ų├Ą─╬óĘųą┼Žóy═©▀^╝ė╦┘Č╚é„ĖąŲ„ą┼ŽóypĪŻĄ─ĘeĘųyĪŻüĒīŹ¼FŻ¼╦∙ęį╔Ž╩÷Ą─▒╚└²ĘeĘųūį▀mæ¬┬╔▐D╗»×ķ
ī”ė┌Č■ļAŽĄĮyŻ¼ķgŽČĄ─╚²┤╬╝░Ė▀┤╬ĒŚ┼cķgŽČ╬óĘųĄ─Č■┤╬╝░Ė▀┤╬ĒŚĄ─┤µį┌ī¦ų┬ūį▀mæ¬┐žųŲŲ„ĮYśŗĘ▒µiĪó▀\╦Ń┴┐Ų½┤¾Īó╣ż│╠īŹė├ąį▓ŅĄ╚╚▒Ž▌Ż¼į┌┤╦Ż¼▒Š╬─┐╝æ]▀m«ö║å╗»ūį▀mæ¬┐žųŲŲ„Ż¼äh│²ī”æ¬Ą─Ė▀┤╬ĒŚŻ¼Ą├ĄĮŽĄĮy╦∙ī”æ¬Ą─Ė„ūį▀mæ¬ģóöĄ×ķ
äh│²Ė▀┤╬ĒŚ╦∙ĦüĒĄ─ę╗éĆų▒Įė║¾╣¹Š═╩ŪŽĄĮy▀mæ¬╦┘Č╚ūā┬²Ż¼ī”┤╦ĮĶĶb│ŻęÄ┤┼æęĖĪPID┐žųŲųąĄ─ĘeĘų╦╝ŽļŻ¼ę²╚╦ķgŽČĘeĘųĪŻßśī”╗∙ė┌POPOV│¼ĘĆČ©Č©└Ē╦∙įOėŗĄ─ŽĄĮyŻ¼ĘeĘųĘĮĘ©┐╔▀x╚ńŽ┬2ĘNŻ║
ė╔ė┌ģó┐╝─Żą═Ą─ņoæBį÷ęµ×ķlŻ¼╦∙ęįĘĆæBĢrŻ¼Ym=rŻ¼╝┤ĘeĘųĘĮĘ©ó┘ó┌Ą─ņoæB╠žąį╩Ūę╗ų┬Ą─Ż╗ī”ė┌äėæB╠žąįŻ¼ė╔ė┌PIDĘeĘų┐žųŲųąĘeĘųĢrķg│ŻöĄ═∙═∙į┌ŽĄĮyĢrķg│ŻöĄĄ─10▒Čęį╔ŽŻ¼╣╩äėæB╠žąįų„ę¬ė╔ILpdøQČ©ĪŻĘeĘųĘĮĘ©ó┌ŽÓ«öė┌ķgĮėį÷╝ė ┴╦Ż¼Å─Č°╝ė┐ņ┴╦ūį▀mæ¬╦┘Č╚ĪŻ
2)║å╗»┐žųŲŲ„Ą─ĘĆČ©ąįĘų╬÷╗∙ė┌POPOV│¼ĘĆČ©└ĒšōŻ¼ķ]ŁhŽĄĮyĘĆČ©ęŌ╬Čų°Ž┬┴ąĄ─ĘeĘų▓╗Ą╚╩ĮØMūŃę¬Ū¾Ż║
ī”ė┌║¾╚²╩ĮĄ─ūC├„ėų┐╔ęį║å╗»×ķī”Ž┬┴ąĘeĘųĄ─ĘŪžōąį╝░ėąĮńąįĄ─ūC├„Ż║
ó┘ĘŪžōąįūC├„Ż║
╣╩ĘeĘųĘŪžōĪŻ
ó┌ėąĮńąįšf├„ ╚ń╣¹ĘeĘųÅ─rŻ®Ū·ī”ė┌╚╬ęŌĄ─ĪĻ<ĪĻŻ«Š∙ėąĮńŻ¼ät║»öĄwėą╔ŽĮńĪŻ
4 Ę┬šµĘų╬÷┼cīŹ“ד×ūC
1)ĘŪŠĆąįŽĄĮyĄ─Ņ~Ę┬šµ─Żą═Į©┴óį┌Matlah/Simulinkųąī”Ū░├µįOėŗĄ─┐žųŲŲ„▀MąąĘ┬šµĘų╬÷ĪŻģó┐╝─Żą═Ą─ūĶ─ß║═ŅlĦĘųäe╩ŪŻ║f=0 7Ż¼Ī▐ĪŻ= 300Ż¼▀mæ¬ģóöĄ╩ŪŻ║a=lŻ¼kn =1 000Ż¼K01=100Ż¼k02=100Ż¼g1= 100Ż¼g2 =1 000ĪŻæęĖĪĀŅæBųąŻ¼▀x╚ĪŲĖĪķgŽČ×ķ25 mmŻ¼Ņ~Č©æęĖĪķgŽČ×ķ10 mmŻ¼į┌2s╠ÄŅ~Č©æęĖĪķgŽČ═╗ūā×ķ11 mmŻ¼į┌4s╠ÄŅ~Č©æęĖĪķgŽČ═╗ūā×ķ9 mmĪŻ
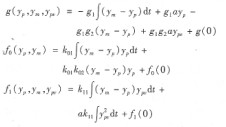
ģó┐╝ŽĄĮy┼cĦūį▀mæ¬┐žųŲŲ„Ą─īŹļHŽĄĮyĄ─æęĖĪķgŽČš{╣Ø▀^│╠Ż¼╚ńłD3Ż¼łD4╦∙╩ŠĪŻ
ī”▒╚ģó┐╝─Żą═║═īŹļHŽĄĮyĄ─æęĖĪķgŽČĘ┬šµĮY╣¹┐╔ų¬Ż¼Ä¦ūį▀mæ¬┐žųŲŲ„Ą─īŹļHŽĄĮyŠ▀éõ▒╚ģó┐╝ŽĄĮyĖ³║├Ą─äėæB╠žąįŻ¼╚ń│¼š{┴┐Ė³ąĪŻ¼Ą½╩Ūė╔ė┌║å╗»ūį▀mæ¬┐žųŲŲ„Ą─ĮYśŗ▌^×ķÅ═ļsŻ¼╦∙ęįĒææ¬▀^│╠ŽÓ▒╚ģó┐╝ŽĄĮyėąĢrķg£■║¾ĪŻ
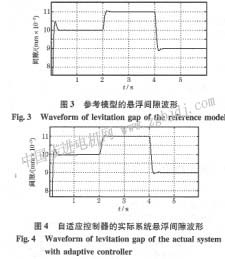
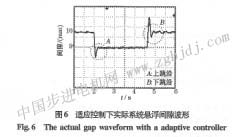
2)īŹ“ד×ūCąįšf├„▒Š╬─ī”│ŻęÄ┐žųŲŲ„┼cūį▀mæ¬┐žųŲŲ„Ą─┐žųŲą¦╣¹▀Mąąī”▒╚Ęų╬÷Ż¼▀x╚ĪĄ─īŹ“×╣żør×ķķgŽČé„ĖąŲ„Ą─▌ö╚ļČ╦»B╝ėĪ└l mmĄ─ą┼╠¢Ż¼üĒ─ŻöMæęĖĪžō▌dĄ─ūā╗»ĪŻįōŪķørŽ┬Ż¼ŽĄĮyĄ─æęĖĪķgŽČ▓©ą╬Ż¼Ęųäe╚ńłD5Ż¼łD6╦∙╩ŠĪŻ
ī”▒╚ Ż¼łD5Ż¼łD6Ż¼į┌ķgŽČļA▄SĢr▓╔ė├▒Š╬─╔µ╝░Ą─ūį▀mæ¬┐žųŲŲ„│¼š{┴┐£pąĪŻ¼š{╣ØĢrķg┐sČ╠Ż¼äėæB▀^│╠ŲĮĘĆŻ¼─▄Ė³║├Ą─æ¬ī”æęĖĪ┐žųŲųąžō▌dūā╗»Ą╚▓╗┤_Č©ŪķørŻ¼╠ßĖ▀┴╦æęĖĪąį─▄ĪŻ
5ĮYšZ
▒Š╬─ę└ō■POPOV│¼ĘĆČ©ėå┴óįOėŗ┴╦ūį▀mæ¬┐žųŲ┬╔Ż¼ĮY║ŽļŖ┤┼ė└┤┼╗ņ║ŽæęĖĪĄ─īŹļH┐š╣╔ųĖ╠ž³cŻ¼ī”╦∙╔µ╝░Ą─ūį▀mæ¬┐žųŲ┬╔▀Mąą┴╦╝┘įÆŻ¼Å─└Ēšō╔ŽūC├„┴╦║å╗»ūį▀mæ¬┐žųŲŲ„Ą─│¼ĘĆČ©ąįŻ¼ūŅ║¾Ż¼Ę┬šµĮY╣¹▒Ē├„╦∙╔µ╝░Ą─║å╗»ūį▀mæ¬┐žųŲŲ„─▄ėąą¦ĄžĖ·█Öģó┐╝─Żą═Ą─▌ö│÷ūā╗»Ż¼æęĖĪīŹ“×ĮY╣¹▒Ē├„Ż¼į┌ķgŽČ░l╔·═╗ūāĄ─ŪķørŽ┬Ż¼Ä¦ūį▀mæ¬┐žųŲŲ„Ą─æęĖĪŽĄĮyŠ▀ėą│¼š{┴┐ąĪŻ¼▀^│╠ŲĮĘĆĄ╚╠ž³cĪŻ
|