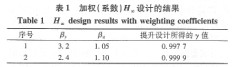
�ɘӿ���ϵ�y(t��ng)������H�����O(sh��)Ӌ
�����ģ��� �٣������
�������I���̴�W(xu��)�Ԅӻ��W(xu��)Ժ�������������I15000��
ժ Ҫ�����]����Ҏ(gu��)�ļә�(qu��n)H�����O(sh��)Ӌ�����ܝM������׃�Q��Ҫ��đ�(y��ng)�×l����ᘌ��M������׃�Q�l���IJɘӿ���ϵ�y(t��ng)�Ĕ_�����Ɔ��}���M����������H���O(sh��)Ӌ����ָ����ֻ�мә�(qu��n)ϵ��(sh��)�Ĕ_�����Ɔ��}��ݔ��˼ә�(qu��n)������(sh��)���Ĕ_�����Ɔ��}�܉�M������H�����Q�đ�(y��ng)�×l������˿������������M��H���O(sh��)Ӌ��ͨ�^���w�Č�����ᘌ��ɷN���}�քe�M����������H���O(sh��)Ӌ������Y(ji��)���������ә�(qu��n)ϵ��(sh��)�Ĕ_�����Ɔ��}���mȻ����׃�Q��ķ���(sh��)ֵ����ԭ�ɘ�ϵ�y(t��ng)��L2�T��(d��o)����(sh��)���������O(sh��)Ӌ�Y(ji��)�������ܴ���ϵ�y(t��ng)����������ָ�ˣ������������x�ϵ�H���C�ϣ�ݔ��˼ә�(qu��n)����(sh��)�Ĕ_�����Ɔ��}���õĽY(ji��)�������_�ģ���ӳ��svnthesis����Ҫ�����ܣ������܉�ӳϵ�y(t��ng)�ڲɘӕr���g�����I���ܣ�
�P(gu��n)�I�~���ɘӿ���ϵ�y(t��ng)���������g(sh��)��H���O(sh��)Ӌ���_�����Ɔ��}
�ЈD���̖��TP ?73 �������R�aiA
1����
�������g(sh��)����ܿ��]���ɘӕr��֮�g��̖��׃�����o���ʴ_��L2�T��(d��o)����(sh��)�������ѽ�(j��ng)�ɞ�ɘӿ���ϵ�y(t��ng)H���O(sh��)Ӌ����Ҫ�ֶΡ������������đ�(y��ng)�����Зl���ģ����l�����M��r���������ڡ��O(sh��)Ӌ���õĽY(ji��)�����H�ϲ�������synthesis����Ҫ�����ܡ�
����������ֻ�мә�(qu��n)ϵ��(sh��)�Ĕ_�����Ɔ��}��ݔ��˼ә�(qu��n)����(sh��)�Ĕ_�����Ɔ��}�M���������đ�(y��ng)�×l������˿��������������M��H���O(sh��)Ӌ������ͨ�^���w�������քeᘌ��ә�(qu��n)ϵ�̺�ݔ��˼ә�(qu��n)����(sh��)�Ĕ_�����Ɔ��}�M����������H���O(sh��)Ӌ�������O(sh��)Ӌ�Y(ji��)���M���˷���������Mһ����У��Y(ji��)�������������O(sh��)Ӌ�ܷ�ӳϵ�y(t��ng)�ڲɘӕr���g�����ܡ�
2�ɘ�ϵ�y(t��ng)�е�����Ӌ��
���^������������ָ��һ�B�m(x��)��̖f(t)���ɘӕr�gT�гɻ���㕽ӵĸ�����̖��
�@������Ҳ��һ�N�xɢ��̖��ֻ���ں���(sh��)���gL2[o��T��ȡֵ������
�F(xi��n)�O(sh��)һ�B�m(x��)ϵ�y(t��ng)�Ġ�B(t��i)���̞�
�@һϵ�y(t��ng)������ݔ��͠�B(t��i)׃��֮�g���P(gu��n)ϵ�ɷ������£�
���xXk���xɢ�r�̵Ġ�B(t��i)XK=X��KT�����t
�������Ӂ���ʾ�r���ǣ�
���е�Rx ��ָ��B(t��i)׃��x�ľS��(sh��)�����¾��ͬ��
ϵ�y(t��ng)(1)��ݔ�����̄t��
�P(gu��n)���@Щ���ӵĸ��Mһ���f�����Ʌ���īI[3]���ڲɘӿ���ϵ�y(t��ng)�У����錦����@��ϵ�y(t��ng)���е�2��ݔ�룬������ݔ��u�͵�2��ݔ��y���@��2��ݔ���ݔ����ͨ�^�������պͲɘ���S�c�xɢ������kd���B�ӵġ��xɢ�r�̵�ݔ��(uk)ݔ����yk���c��B(t��i)׃��X֮�g���P(gu��n)ϵ���dz�Ҏ(gu��)�ı������xɢ�����õ��P(gu��n)ϵʽ������(j��)ʽ(3)��ʽ(4)�ټ����@��2��ݔ���ݔ����ďV�x�����������ʽ�Ă��f����(sh��)�飺
ʽ�У�����(y��ng)��2��ݔ������xɢ��ϵ�y(t��ng)��ݔ��
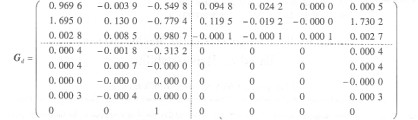
����Ӌ������һ���nj��@��Ч��������ʽ�Ă��f����(sh��)G׃�Q��һ�����S�ľ����ʽ�Ă�����(sh��)�Gd:
����׃�Q���õ�Gd����һ���þ�ꇁ���ʾ���xɢ�����ˣ����������ó�Ҏ(gu��)�ķ������xɢϵ�y(t��ng)�M�оC��( synthesis)�ˡ����wӋ��ĕr�����И˜ʵ��㷨�ͳ���
3�M��������(y��ng)�×l�����ա��O(sh��)Ӌ
�īI[1]�нo���ˑ�(y��ng)���������M��H���O(sh��)Ӌ��2��ǰ��l����
�� (A��B1)�ɿأ�(c1��A)���^�y��
�� ( c2��A)���^�y��
�l�����е�A���ϵ�y(t��ng)�V�x����Ġ�B(t��i)ꇣ�B1��nj���(y��ng)�ڵ�һ��ݔ���ݔ��ꇣ�C1��nj���(y��ng)�ڵ�һ��ݔ����ݔ��ꇡ��l�����DZ��C����׃�Q����(sh��)�ȃr�ėl����ԓ�l�����C�ˏS�x����ĵ�һ��ݔ�댦��B(t��i)�Ŀɿ��ԣ��Լ���һ��ݔ����ϵ�y(t��ng)��B(t��i)�Ŀ��^�y�ԡ��l�����е�C2��nj���(y��ng)�ڵ�2��ݔ����ݔ��ꇡ��īI[1]��ͨ�^���w�����ӷ�����ԓ�l�����M��r�����O(sh��)Ӌ�г��F(xi��n)��һЩ���}��
���ڲ��M�㑪(y��ng)�×l���ٺ͢ڣ����������������`���Ȇ��}��������(w��n)���Ԇ��}�����ڔ_�����Ɔ��}����Ҏ(gu��)��ݔ���ә�(qu��n)����(sh��)�O(sh��)Ӌ���M��l���ٺ͢ڡ�
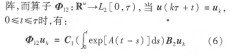
��鲻���ó�Ҏ(gu��)�ә�(qu��n)����(sh��)���k�����M���O(sh��)Ӌ���@��Ʌ��շǾ���H���O(sh��)Ӌ���������Ù�(qu��n)ϵ��(sh��)���M���O(sh��)Ӌ����D1��ʾ��
�O(sh��)�D1�Ќ���Ă��f����(sh��)��
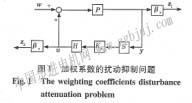
�V�x����Gȡ��
��ʾ���ܵ�ݔ���F(xi��n)���ǣ�
�����ݔ��y=x2��ʽ(9)��ʽ(10)�еĦ�y�ͦ�u������(y��ng)�ę�(qu��n)ϵ��(sh��)��
���ɘ�ϵ�y(t��ng)���D1���Ĕ_�����Ɔ��}���f�����Ù�(qu��n)ϵ��(sh��)��H���O(sh��)ӋĿ�����O(sh��)Ӌ����������ʹϵ�y(t��ng)��L2����С�ڻ���ڦü���
��y=1���tʽ(ll)�����O(sh��)Ӌ��ә�(qu��n)��ϵ��(sh��)��ݔ���������н磬��С�ڔ_��ݔ��w(t)��������
����@�Dzɘ�ϵ�y(t��ng)�����Բ����������g(sh��)���M���O(sh��)Ӌ���O(sh��)Ӌ�r�Ȍ��V�x�����M���������õ�һ���ȃr��H���xɢ���������O(sh��)ӋH������������������y=1�ļs�����xȡ��ͬ�ę�(qu��n)ϵ��(sh��)�M�ϣ���y����u�����F(xi��n)�����е�2�M��(sh��)��(j��)���O(sh��)Ӌ�Y(ji��)���������M���f����Ҋ��l��
�������ʽ(8)���B�m(x��)ģ�ͣ��������t�քe�����c��1����(y��ng)�������O(sh��)Ӌ���õ��xɢ����������Simulink��ϵ�y(t��ng)�M�л�Ϸ��棬�ɵ��A�S�_�������µ�ݔ��푑�(y��ng)y(t)�͌����ݔu(t)�����������ԣ�����ݔ��푑�(y��ng)y(t)���Կ�������(qu��n)ϵ��(sh��)��u��̫������y��ƫ���С�������Й�(qu��n)ϵ��(sh��)��u��̫������u(f)���������^������
�O(sh��)Ӌ�r�x�ò�ͬ�ę�(qu��n)ϵ��(sh��)�M�б��^�Դ_��һ��****���O(sh��)Ӌ�����籾�������x��1����̖��1���O(sh��)Ӌ������@�ry(t)��ƫ��С��u(t)�ֲ���̫��
�F(xi��n)�ځ������@���O(sh��)Ӌ������׃�Q�ķ���(sh��)�ȃr���}�����������x��խ�����O(sh��)Ӌ�����Լ�ʹ���xɢ���O(sh��)Ӌ����Y(ji��)���c���]�B�m(x��)��̖�IJɘ�ϵ�y(t��ng)��(y��ng)ԓ����ӽ��ġ����磬��ݔ��푑�(y��ng)y(t)Ҳ���Կ��������^���^�̵�2s�r�g��(n��i)����20���ɘ�(r=O l s)�����Լ�ʹ�Q���xɢ��������ݔ��y(k)��(g��u)�ɵ��A���β����c�ɘ�ϵ�y(t��ng)��y(t)��(y��ng)ԓ�Ǻܽӽ��ġ�����@����һ�����������xɢ������P(z)�����棬�cǰ�������]Ӌ�ĵõ����xɢ������ki(z)��(g��u)��һ���xɢϵ�y(t��ng)��Ȼ���ó�Ҏ(gu��)�ķ���Ӌ��ԓ�xɢϵ�y(t��ng)���ա�����(sh��)������C����Ӌ�����õ�vֵ��
�@2�l���l���Զ��к��Lһ��ƽ̹�Σ����Գ��½�څ�ݡ����Ϗ�H����(y��u)���O(sh��)Ӌ���f���O(sh��)Ӌ�Y(ji��)����һ�lȫͨ���ԡ���Ȼ���H����H�� �O(sh��)Ӌ�е����Ŀ��������������殐ֵ���ԣ����l���ԣ������l�Ε���˥�p����D2�еĦ�max������ʾ�����Ù�(qu��n)ϵ��(sh��)���O(sh��)Ӌ�r���ә�(qu��n)������ݔ����y��u���ԣ���������ӣ�����@ȫͨ���Է��䵽�@2������Ҳ��ƽ̹�ġ�����(j��)�D�����c��֪���@�xɢϵ�y(t��ng)��H������(sh��)����(y��ng)���l��������m =0�r��ֵ���ɈD2�ɵ�
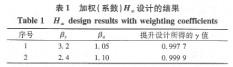
�@��խ�����xɢϵ�y(t��ng)��H������(sh��)��(y��ng)ԓ���c�ɘ�ϵ�y(t��ng)��L2�T��(d��o)����(sh��)��ӽ�����������Ӌ�����õ�yֵ����0 997 7�����_��С��(sh��)4λ����Ҋ��1����
�@�����ӱ����������Ù�(qu��n)ϵ��(sh��)�r����׃�Q��ķ���(sh��)ֵ�õ���ԭ�ɘ�ϵ�y(t��ng)�ķ�ӳϵ�y(t��ng)���ܵ�L2.�T��(d��o)����(sh��)�������Ù�(qu��n)ϵ��(sh��)���O(sh��)Ӌ���xȡ��ͬ�ę�(qu��n)ϵ��(sh��)���M�к��������@�N�O(sh��)Ӌ��yֵֻ��һ�����g����ֵ�������ܴ���_�����Ɔ��}�е�����������ָ�ˣ����Լ�ʹ�Dz���H��������Ҳ�����������x�ϵľC�ϡ�
4ݔ��˼ә�(qu��n)�Ĕ_�����Ɔ��}
���H�ϣ�ʹ�Ù�(qu��n)����(sh��)���M���O(sh��)Ӌ����H���O(sh��)Ӌ�ľ��裬�����_���l����ε��O(sh��)ӋĿ�ġ����ڔ_�ӆ��}���������Ҏ(gu��)�ļә�(qu��n)�O(sh��)Ӌ˼�룬��ݔ���M�мә�(qu��n)���Dz��M������׃�Q�đ�(y��ng)�×l���ġ������@���������(qu��n)����(sh��)����ݔ��ˡ���ݔ��˼ә�(qu��n)�Ĕ_�����Ɔ��}����ȫ�M��l���ٺ͢ڣ����Կ������������M���O(sh��)Ӌ��
�_��������ָ����ϵ�y(t��ng)�ڌ���ݔ��_��w�����µ����ܣ�����(y��ng)�Ă��f����(sh��)��
���Ã�(y��u)���������O(sh��)Ӌ�r�����Ȍ�ʽ(13)�Ă��f����(sh��)�M�мә�(qu��n)����������еă�(y��u)�����}��
�ɘ�ϵ�y(t��ng)����D3��ʾ��
ʽ(14)�ĦÄt��ָϵ�y(t��ng)��L2�T��(d��o)����(sh��)�����^�ә�(qu��n)������(sh��)���O(sh��)Ӌ�ĸ���c�B�m(x��)ϵ�y(t��ng)������һ�ӵġ�
��(qu��n)����(sh��)W1���е�ͨ���ԣ������ڱ�����ȡ��
ע�W1�ĵ��l�η�ֵ��1������
���Ը���(j��)ʽ(14)������õķ���(sh��)��Сֵv���ǵ��l��P��I+ KP��-1�ķ�ֵ��Ҳ���ǔ_�����Ɔ��}�е����ܡ�H���O(sh��)Ӌ�����������ʹy�������ܵ���Сֵ����****���ܡ�
�Ì�����ʾ�����ә�(qu��n)�]�h(hu��n)ϵ�y(t��ng)���殐ֵBode�D���У�Pd��D3
��(qu��n)����(sh��)�Σ���ʽ(15)��ʾ���t�D3��ʾϵ�y(t��ng)�ďV�x�����
5�O(sh��)Ӌ�����摪(y��ng)��
�D3�Ќ���Pȡ��
����Matiab����(sh��)clhfsvn����H����������
����(y��ng)���]�h(hu��n)ϵ�y(t��ng)�ķ���(sh��)ֵ��
�ɴ˿ɵÔ_�����Ƶķ�(w��n)�B(t��i)ֵ��
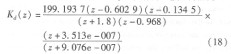
������B�m(x��)�V�x����G�ñ������xɢ����Gd2(z)���ٌ�ԓGd2 (Z)�cʽ(18)�еĿ������Y(ji��)�ϣ������]�h(hu��n)ϵ�y(t��ng)��H������(sh��)���=0. 001 3���c����ϵ�y(t��ng)��H������(sh��)��ȫ��ȡ�
�ɴ˿��Եó�����2�����O(sh��)�l���٣���ͬ�r�M��r�������㷨�_���o���˲ɘ�ϵ�y(t��ng)��������L������(d��o)����(sh��)��
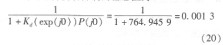
��ʽ(20)���Եó����˲ɘӿ���ϵ�y(t��ng)�����Ĕ_���������ܦ�Ҳ����ʽ(19)�������O(sh��)Ӌ�ķ���(sh��)ֵ���Ķ��Mһ���f���˕r��H���O(sh��)Ӌ���õ�ϵ�y(t��ng)�ó��ĽY(ji��)�������_�ģ����ҷ�ӳ��svnthesis����Ҫ�����ܡ�
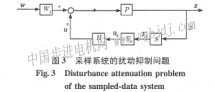
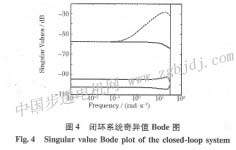
ȡ�ɘ�����T=0.1 s����G(s)�M������Ӌ�㣬������׃�Q���Gd��[ʽ(7)]���B�m(x��)����ı������xɢ�����]�h(hu��n)ϵ�y(t��ng)�殐ֵBode�D����D4��ʾ��
�ɈD4��֪��H���O(sh��)Ӌ�Y(ji��)�����ϳ�Ҏ(gu��)���O(sh��)Ӌ�ĸ�����ǿ���У�ġ�
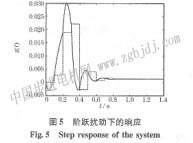
�A�S�_��ʽ�µ�푑�(y��ng)����D5��ʾ��
������ɘ�ϵ�y(t��ng)�چ�λ�A�S�_���µ�ݔ��푑�(y��ng)z(t)���A����������̓�����鳣Ҏ(gu��)�xɢ�O(sh��)Ӌ�Y(ji��)����
���Կ�������Ҏ(gu��)�xɢ�O(sh��)Ӌֻ�ܱ��C���xɢ�r�̵�ֵ�c���Hֵ��һ�£��ɘӕr��֮�g���H��푑�(y��ng)z��t�������t�c�xɢ�O(sh��)Ӌ�ĽY(ji��)�����^��ij��룬���Ҫ��ӳ�ɘ�ϵ�y(t��ng)���������ܣ�߀��Ҫ���������g(sh��)����Q��
6�Y(ji��)�Z
����׃�Q���m���ڳ�Ҏ(gu��)�ә�(qu��n)����(sh��)���ա��O(sh��)Ӌ��ֻ�мә�(qu��n)ϵ��(sh��)�Ĕ_�ӆ��}��ݔ��˼ә�(qu��n)����(sh��)�Ĕ_�����Ɔ��}�M���������đ�(y��ng)�×l�������ә�(qu��n)ϵ��(sh��)�Ĕ_�����Ɔ��}�õ����O(sh��)Ӌ�Y(ji��)��ֻ��һ�����g����ֵ�������ܴ���_�����Ɔ��}�е�����������ָ�ˣ�Ҳ�����������x�ϵ�H���C�ϡ�
��ݔ��˼ә�(qu��n)����(sh��)�Ĕ_�����Ɔ��}���O(sh��)Ӌ�Y(ji��)���������O(sh��)Ӌ�Y(ji��)�����ϳ�Ҏ(gu��)��H���O(sh��)Ӌ�ĸ�����ǿ���У�ġ��Mһ���đ�(y��ng)�÷�������������O(sh��)Ӌ�_����(y��u)�ڂ��y(t��ng)���xɢ�O(sh��)Ӌ���܉�ӳ�ɘ�ϵ�y(t��ng)�ڲɘӕr��֮�g���挍���ܡ����ںܶ�̌��H���}��������Ӌ��C�팍�F(xi��n)��ϵ�y(t��ng)�Ŀ��ƣ�����(y��ng)��ϵ�y(t��ng)����(y��ng)ԓ���ɘ�ϵ�y(t��ng)���M���O(sh��)Ӌ�����ĵó��ĽY(ji��)Փ��ɘ�ϵ�y(t��ng)���������g(sh��)�ڌ��H�����еđ�(y��ng)���ṩһ���ķ�������(j��)�����˺ܺõ�ָ��(d��o)���á�
|