PMSM�Ĺ����D������ɢ�����{�ȿ���
�þ����w���棬�R��ɏ
�㽭��W늚�̌WԺ���㽭����310027��
ժ Ҫ��ᘌ�ˮ��ͬ��늙C( PVSNI)�ŷ�ϵ�y���ٶȿ���Ҫ���ڹ����D������ɢ���Ʋ�������������{������ͬ��늙C���ٶȿ��Ʒ�����ԓ����������ƽ����^�c�������������η������o����PMSM���ٶȿ���������ᘌ��̶����慢������늙C���B���ܿ��ƵIJ��㣬����ϵ�y���Hֵ�c��������ֵ֮�g��ƫ������˻��������Ʒ�������߿���ϵ�y���ٶȸ�ۙ����j����Ŀ��Ʒ���������ϵ�y�OӋ�^�̣��p����ϵ�y�����Ѕ����������ڱ��Cϵ�y���Нu���������ܵ�ͬ�r�������ϵ�y�ĕ��B푑�����һ����͌��Y������������ԓ�ŷ���������ͬ��늙C�^���y������ƅ����㶨�ķ�������ʹϵ�y���и��õĿ��������P�I�~�������D������ɢ���ƣ������{�ȣ�����ͬ��늙C����������
�ЈD���̖��TP 27 �īI���R�a��A
1�� ��
�����Dϵ�y�ǽ������W�Ļ��A���������ڏV�����I���У�����W�j�����������B�ȣ��ڏV�x�����D�_�şoԴϵ�y���A�ϰlչ�ĺ�ɢ�˿��ܿ�ϵ�y��������ɢ�ĸ�����������Dϵ�y����С��ڿƌW�����I��ͨ���J��ӑBϵ�y������׃�Q�b�ã���ϵ�y�_�����B�\�D��B�r����̎��һ�N�ӑBƽ���B����˿���ͨ�^�������εķ���ʹ��ϵ�y�\����������ƽ���c�������D������ɢ���Ʒ��������@ôһ�N�������η�����
�Ժ�ʸ�����Ƶ�����׃�Q���������÷�����ɢ�����D���Ʒ������x����m���]�hϵ�yHamilton��������ϵ�y��Lyapunov����������Lyapunov������ԭ������ϵ�yȫ�֝u���������OӋԭ�t�����F������ͬ��늙Cϵ�y���ٶȽ�����ƣ�������ϵ�y���OӋ�^�̣����Y��ϵ�y�����D�����������ГQ�Ͳ�ֵ���˩�Ʒ����������慢���M�������{�Ȼ�Ͽ��ƣ������ϵ�y�ĕ��B푑����ܡ�
2�����D������ɢ��Փ����
�����D���Ʒ�����˼����ͨ�^����ʹ��ϵ�y�ij��������_��һ���ӑBƽ���B���Ķ�ʹϵ�y�\����һ�������ķ�����B��Ortega. R�������D���Ʒ������˿��w�Ľ�B������˹����D������ɢ���Ʒ��������ù����D������ɢ�����M��������ͬ��늙C�ٶȿ��ƵćLԇ��
����һ��ϵ�y��
ʽ�У�xeR���B׃����F(x) e Rn��n��Y����ꇣ���(x)������D������
����Y�����F(x)�M�㣺
�tϵ�y(1)��һ����ɢ�����Dϵ�y�����У�F(x)���Ա��ֽ��
ʽ�У�J(x)��һ�������Q��ꇣ�J (x)=-J(x)��R(x)��һ�����������Q��ꇣ�R(x) =RT��x����O��
һ���Ǿ���ϵ�y��
ʽ�У�u���������x��Rn��u��Rn��G��x����M�Ⱦ�ꇡ�
��������OӋ����������uʹ��ϵ�y�ɞ�
�ҿ�����u=��(x)ʹ����ʽ������
����xȡ���������D����H(x)����������ô���磺
�ĺ�ɢ�����Dϵ�y���У�
����Lyapunov������ԭ����ϵ�y�u��������
3�������OӋ
����ͬ��늙C�{�����w�eС�����ܺá��Y�����Ρ��ɿ��Ըߡ��D�ش�����c���ڬF�������{����õ���Խ��Խ�V���đ��á�������������ͬ��늄әC�������ٶȺ�����ķǾ�����ϣ������Ҫ���÷Ǿ��Կ��Ʒ��������M�н�����ƣ�Ŀǰ���õķ�����Ҫ��PID���ơ����m�����ơ���ģ׃�Y�����ơ����ܿ����cBack stepping���Ƶȣ����ù����D������ɢ����������ͬ��늙C�M���ٶȿ�����һ���µ��о�����
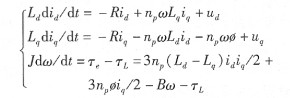
1)����ͬ��늙C���Wģ������ͬ��늙C�Ĕ��Wģ�Ϳ��Ա�ʾ��
ʽ�У�id��iq��d��q�����µ������R�鶨��늘��@�M��裻Ld��Lq��늸У��؞���ٶȣ��՞���, np��O������J���D�ӑT����Te��늴��D�أ�TL��ؓ�d�D�أ�B��ճ��Ħ��ϵ����
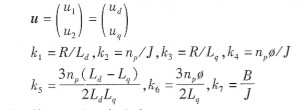
�tϵ�y(5)���Ա��_��
��PMSMϵ�y���B�\���������ٶȕr���У�
�t���ڷ��B�\�Р�B�c��
���z�������id���t�������D�٦ء��£��ɵ�iqƽ���c���iq0��
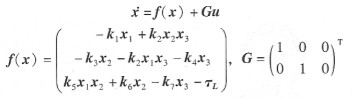
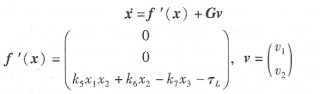
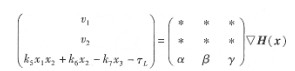
2) PMSM�����D������ɢ�������OӋ�OӋϵ�y�ķ���������u��
�t����ϵ�y�ɞ飺
����ͬ��늙C�������əCе�ܺ���ܘ��ɣ���늙Cƽ���\���������D�ٕr��늙C��ݔ��ݔ�������_��һ���ӑBƽ�⣬�t���xȡ�]�hϵ�y�Ĺ����D������
�xȡ�Ĺ����D������ʾ����ͬ��늙C�\��������ƽ���c�r��ϵ�y���������Q�_��һ���ӑBƽ�⣬�]�hϵ�y�Ĺ����D��������СֵO���t
���OF��x��
��Ҫ�M�㣺
�xȡF��x���飺
����r1��r2 >0���M��ʽ(2)�ĺ�ɢ�����Dϵ�y�l��F(x) +FT��x��<0��ȡ��
�t�]�hϵ�y�ɞ�
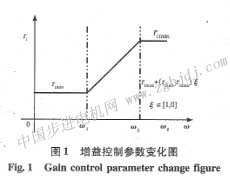
3)�����{�ȿ������OӋ�����{����һ�N��Ч��Q��׃�ӹ��r�ķǾ��Կ��Ʒ������īI[14]ᘌ��Һ�ŷ��ٶ�ϵ�y�ķǾ��Ժͅ����r׃���������ģ�������{�ȿ��Ʒ������īI[15]ͨ�^�OӋ���ӷ������������ƴ���̶�����������ƣ��ڝM��Ȍӿ��Ƽs���´_���a��Ч�����īI[16]���������{�ȷ����M�ЃɷN���Ʒ���������ƽ���c�^����M�Ѕf�{׃�Q���ơ�
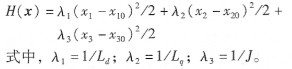
��ϵ�y�У����ƅ���r1��r2���x����ϵ�y��푑��в�ͬ��Ӱ푡�r1��r2�����x���^С�r��ϵ�y���ٶȢ����^�죬���Ǖ����F���{��ͻ��ؓ�d�r��ϵ�y�D��ͻ׃�^��r1��r2�x���^��r��ϵ�y���ٶ�푑�׃�������dz��{���õ��˺ܺõĿ��ƣ�ͻ��ؓ�d�r��ϵ�y�D��ͻ׃�^С�����ŷ������У�ϣ��ϵ�y��ƫ�x�����ٶ��^��r��ϵ�y�ٶ��܉������ߣ����ӽ������ٶȕr��Ҫ��ϵ�y�ٶ��܉��_������ƽ�������Ҍ���ؓ�dͻ׃��r�������õ��������ܡ��]�hϵ�y�����D����H��x�����������x��ʾ��ϵ�yƫ�x����ƽ���c�Ĵ�С����˿��Ը��������D�����Ĵ�С���{������r1��r2�Ĵ�С�Ķ�����ϵ�ٶ�푑�������
�����ŷ�ϵ�y�Ŀ���Ҫ���O���ГQ�ͻ�υ�������Ҏ�t��
����Ҏ�t���������x��ʾ�飬���]�hϵ�y�����D����ֵ������������ֵH1(x)�r������С�������Ʋ��ԣ�ʹϵ�y�܉��������D�٣��M��ϵ�y����푑�Ҫ���]�hϵ�y�����D����ֵС����������ֵH2(X)�r�����ô����Ʋ��ԣ�����ϵ�y�a�����{�����ϵ�y�ķ����ԣ����˜p�م����ГQ��ϵ�y�����IJ������Ժ��D��ͻ׃��r�����]�h�����D����ֵ�������R��ֵH1(x)��H2(X)֮�g�r�����慢�����û�������{�ȿ��Ʋ����M���{����
����ri׃�����cf��׃��ʾ��D����D1��ʾ��
4)ϵ�y�����Է����xȡ��(x)���]�hϵ�y(7)��Lyapunov��������ʽ(8)��ʽ(9)���Եõ���
��H(x)>0��H(x)��ؓ�붨��H(x)��x��x���r��������㣬����Lyapunov������ԭ�����]�hϵ�y��xo�c��u��������
4����͌��Y��
��Matlab/Simulink�h����ϵ�y�M��ԇ��о�������ͬ��늙C�����xȡ��Ҋ��1��
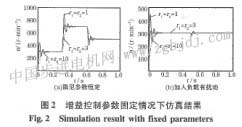
1)������ƅ����㶨�r ���ᅢ���㶨�r���ٶ�푑����������ͼ���ؓ�d�Д_����r�µ��D��푑���������D2��ʾ��
�O��ϵ�y��t=0 s�r��ؓ�d�D�؞�2N-m����t��[0��0 3���r���o���D�ٞ�300 r/min��t��[0 3��0.6)�r�D�ٞ�700 r/min��t��[0.6��1]�r��500 r/min���քeȡ���ᅢ��r1��R2������ҷքe��1��3��10���ĈD2(a)�п��Կ����������ᅢ��С�r��ϵ�y푑��ٶȿ죬���Ǿ��г��{���������ᅢ��r1��r2����r��ϵ�y푑�ƽ�������پ��г��{��������ϵ�y��푑��r�g���ӡ�
ȡ���ᅢ��r1��r2�քe��1��3��10��t =0 s�r���o���D��300 r/min����ʼؓ�d�D�؞�ON-m��ؓ�d�D����t=0.5 s�r�������С��2N��m��ؓ�d�D�ء�
�D2(b)�������^���������ƅ������^���������ƅ����܉���õ��m��ؓ�d׃��������ͻ��ؓ�d������D��ͻ׃��r�и��õ��������ܣ�
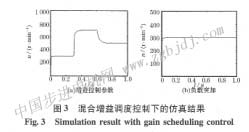
2)�����{�ȿ��ƕr����ʽ(10)�����M�Ѕ��������{�ȿ��ƣ�������ƶ����M�Ќ��r�{���r���ٶ�푑�����������ؓ�dͻ�ӕr���ٶ�푑�������
��D3��ʾ��
�D3(a)�У������D���O�����ϣ�ȡ��1��0 7t00����2��0. 9��0���������{�ȿ����£�������1����2�M��ϵ�y�{�����ķ��������У����Եó����M��������ƅ������{��׃���r��ϵ�y�܉���܉����푑������܉�ܺõ������^С���ƅ���������ϵ�y푑����{����
�D3(b)���c�̶�������ƅ�����ȣ�ϵ�y�ȱ������^С������ƅ�����ϵ�y����푑��ԣ��ֱ������^��������ƅ�������ͻ��ؓ�d�r���D�������m���ԡ�
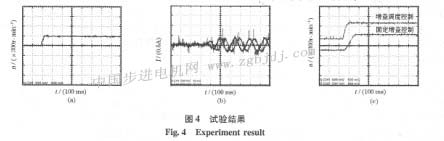
������C��������Ļ���ؓ�d�D���^�y���Ĺ����D������ɢ��PMSM�ٶȿ����㷨�Ŀ����ԣ���һ�_PMSM늙C�M���ˌ���о���Ӳ��ϵ�y�����˔�����̖̎�����ӹ�����ģ�K( DSP+ ICBT)��ģʽ�������·����TI��˾�ĸ�����DSP( TM5320F2407A)�����������ϵ�y���Ƴ���������������ڶ��r�Д��ӳ���M�ɣ��������������ϵ�y��׃�����x�Լ���ʼ���O�ã����ڶ��r�Д����ϵ�y�����A/D�ɘӣ�λ�ú��ٶ�Ӌ�㡢����׃�Q���D�ع��㡢����늉��Ĺ����D�{���Լ�SVPWVI�{�Ƶȡ�
ԇ�Y������D4��ʾ��
�D4(a)���O�������D�ٞ�300 r/min�r���ٶ�푑��������D4(b)�����ؓ�d�D�غ�����푑��������ĈD�п��Կ���������������ƅ������{�������M��PMSM�ٶȿ��ƣ�����ʹ��ϵ�y�������D4(c)���D����500 r/min�r�������ȿ��ƺ̶�������Ʒ����µ��ٶ�푑��������������У����Կ���ʹ�Å��������{�ȿ��Ʒ����M��PMSM�����D�����ٶȺ�ɢ���Ʊȅ����㶨���Ʒ������и��õ�푑����ܡ�
5�Y�Z
�������ù����D������ɢ���Ʒ����������������^�c�о�������ͬ��늙C�Ľ�ģ�ٶȿ��Ɔ��}��ԓ�����Ա��Cϵ�y�ĝu�������Ԟ��OӋԭ�t��ͨ�^�ӑBϵ�y�������Q���^�c������ͬ��늙C�ٶȿ��Ɔ��}�w�Y��ӑB����ƽ�↖�}���������D��ƽ���\�Еr���]�hϵ�y�����D����ȡ����Сֵ���Ķ�����ͨ�^���һ�ƫ�ַ��́���Q����ͬ���������Ɔ��}��ᘌ���Ҏ�����D������ɢ���Ʒ������ܺܺÿ���ϵ�y�ӑB���ܵIJ��㣬���ù����D�������������{�ȅ�����������ГQ�Ͳ�ֵ��Ϲ����D������ɢ���Ʒ�����ԓ�������Ό��ã��ڱ��C��ϵ�y�����Ե�ͬ�r��������ϵ�y�ĕ��B���ܡ�����͌��Y���������^�̶����慢����������������Ĺ����D������ɢ�����{�ȿ��Ʒ�������ʹ��ϵ�y���и��õĄӑB�Ժͷ����ԡ�
|