|
�� �������d��
(�㽭��W���㽭���� 310027)
ժҪ�����ܛӲ���Y�ϵĔ���ģ�M���Ƽ��g���F���ۙ�ͻ��ʽ���M늙CSPWM���ӣ�ʹ���ʽ���M늙C��������ӽ����Ҳ����Եõ���ͬ������늄әC�ĈA�����D�ň�����������˲��M���r��ͬ�rʹԓ���Դ���\
���ڔ����ŷ��{��ϵ�y��
�P�I�~��SPWM���M늙C������
�ЈD���̖��TM301.2 �īI���R�a��A ���¾�̖��1001-6848(2000)03-0016-03
1�� ��
���M늙C�ڹ��I���Ƶĸ����摪��ʮ�֏V��������Ҫ���c���_�h�\�еęC�ƫ@���˽ӽ��]�h���������ܡ����ڿ���Ҫ��ߵĈ��υsֻ���Î�λ���]�h��ֱ��늙C��ϵ�y�ɱ�������ӡ�
��Փ�ϣ�ֻҪ��һ�������o���ֱ�ɿ������B�m�\�С����H����Ԫ���������ƣ��m������ȫ�B�m�\�У�����������r�����ܝM�㾫��Ҫ���Č��F�����ӷ���������������׃�����m�Լ��ƏV�ărֵ��
2ԭ��
�Զ�����ʽ���M늙C�������Ƚ�B�D�ر��_ʽ�͈A�����D�ň�����ʽ��
������Ԝu�����Ч���������Ǿ������أ������ط��̞顣
���M�м��֣�����������顣
J���~��������ڞ�r�g��������ֵ����Ҫ��IJ��Mλ�á����d�r���D�ӵ�ƽ��λ�ÛQ������Ҋƽ��λ���Ƅ���a�ǣ�Ҳ������Ҫ�Ľ�λ�ơ�
�������Q�@�Mͨ��������Q������ܮa���A�����D�ň����@�����������a���Ĵ��������飺
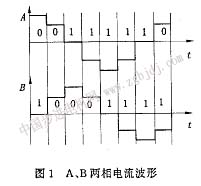
A���B��Ĵ���ʸ�����L���������r��ȣ����䷽�����S�r�g��׃���ڿ��g�M�����D��
3ϵ �y
����ϵ�y��Ҫ������̖�l���h��������PWM�ز��h�������e�ӭh����ȫH������·4���֘��ɡ�
3.1�����������a��
����C��MATLAB���Z�Ԍ����Ҳ��M��3600N�����Ѿ��֣�����Ҫ�������Ͱ�3600���ֳɶ��ق��ɘ��c��������ɘ��c������ֵ��Ȼ��
�õ��ĸ��c���M��2�M������̎����ᘌ�8λDlA�D�Q�õ�2�M��ƫ���������˔���ݔ��EPROM���@�Ӕ���̎����������ɡ�
��8���������D1�Ѕ�������֮�g��900����λ�����ȫH��ͨ��Ҫ��ϵ�y����،�ÿ����������ֵ��������˃ɷN���Ơ�B��ͬ�����Ƙ�ӛλ������������c�˞�0����������c�˞�1��С������c�˞�1�����Ƙ�ӛO��ʾԓ����ͨ��1��ʾԓ���ֹ���@Щ��ӛ�ͅ�������ֵ�ַ��ڲ�ͬ��EPROM�У�������һһ�����ش������ͬ�ĵ�ַ�£��Ա�ͬ������Ӌ��������ַͬ���x����ԓ���Ƙ�ӛ�Á�����TL494�����^�ˣ��Ķ�����PWM��̖��ݔ�����@��̎���ĺ�̎�Ѓ��c��һ�ǿ��Ƙ�ӛ�ͅ������ε�ݔ����ͬ���ģ�����ÿ����̖������Ȼ�Ę�ۻ��i�r�g�����������ε���ֵ�������Ę�ӛ1����1�r�P����ۣ�������ֱͨ�F����������λҊ�D1��
3.2����̖�l���h��
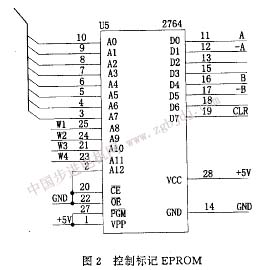
ͬ������Ӌ�����Ƀ�ƬCD4516���B���ɣ����߹���ͬһ��������̖���ƣ��Ա�����ѭ�h��׃�M��Ӌ������λӋ������CP�}�_�ɵ�λӋ�������Mλݔ�����롣8λ����ݔ�����Ɍ�ַ256����Ԫ��27C64�кܶ�퓣��@������4퓣����4�n����������ֵ����8��32��64��128��4�N��퓵Č�ַ�ɸ�λ��ַ������ɡ�
3ƬEPROM�քe���A�࣬B�࣬���Ƙ�ӛ�����п��Ƙ�ӛEPROM��DO��Dlݔ��A��-A��ͨ����̖��D4��D5ݔ��B��-B��ͨ����̖��D7�ͳ�������̖�����Ƙ�ӛEPROMҊ�D2��
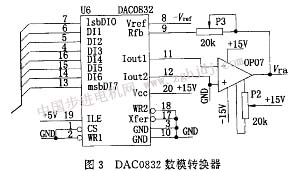
A���B��EPROM��8λݔ������DAC0832�M�Д�ģ�D�Q��DAC0832�ą����ƽ�ɾ��ܻ���늉�Դ���롣����DAC0832�������ݔ
��������Ҫ���\���D����늉���ݔ������̎�ø߾��ȣ����h�Ƶ�OP07���C�Ϻ������������̖�����ƽ����DAC0832�Ƿ��O��ݔ�����ʅ����ƽ����ؓ�ƽݔ����ܵõ����_�ą������Σ������ƽ����̫�ͣ���t��Ӱ�ݔ�������|����DAC0832��ģ�D�Q��Ҋ�D3��
��DAC0832�������A�����Ҳ����һ�����벨���@����Ӱ푺��ӣ����O�Կ������ɿ��Ƙ�ӛEPROM����ɡ����Ƙ�ӛEPROM��������̖��+5v���ƽ����Ҫ�D����+15V���@��������ͨ���l���O�܁팍�F��
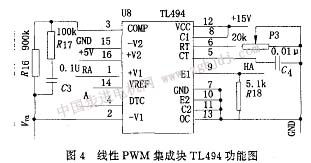
3.3����SPWM�ز��h��
�ز��ɾ���PWM���ɉKTL494���ܣ���̎���ˆζ���Oݔ����5�_��6�_�քe����ݺ�����Ԯa����X���������`��Ŵ���2�e�ò��á��`��Ŵ���1��2�_�Ӆ������Σ�1�_�Ӳɘ����ķ�����̖��2�_�c3�_֮�g��RC�W�j�Á�����PWM�Ą��������͌�����]�h����ϵ�y��O�c�M���a������ȡֵ�c늙C�Ȳ��������P�����Ҳ���̫��tPWM�����^�������������F������壻Ҳ����̫С����tPWM�����^����ʧȥ���ГQ�ĸ��S�̶ȡ��ʴ˾W�jȡֵ����Ҫ��4�_�Ӹ�����Ƙ�ӛ����̖������1�r�P��PWMݔ������0�rPWM��̖ͨ�С�����PWM���ɉKTL494���܈DҊ�D4��
3.4 ���e�ӭh��
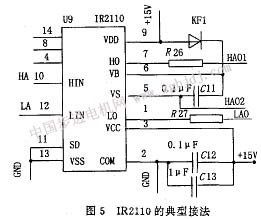
PWM��̖ͨ�^�������e���ܵ�MOSFET��оƬIR2110����ͨ������ȫH����Ϙ�ۣ��M����ͨ���Ϙ�ز��Ĺ����^�̡�IR2110�LJ��H
��������˾�ĮaƷ���Ѓɂ���ȫ�����ĸ߱���ݔ��ݔ��ͨ�����҃ɂ�ͨ�����_ͨ�����P���ķ����ֱͨ�Ļ��i���ܣ�����ԭ�еĻ��i������̖��ʹ�����·��������ɿ���IR2110�ĵ��ͽӷ�Ҋ�D5��
IR2110����ͨ��ݔ�����Ĺ����Դ��һ�Ҹ��Դ���@��ͨ�^һ�N���e���g�ɹ̶����Դ�Á��ġ���늶��O�ܵ��͉�������횴��ڸ߉�ĸ���ķ�ֵ늉������]����һ����֏͵Ķ��O�ܡ����e���C1��ֵ����5kHz���ϵ��_�P�l��ȡ0.lvF���ɡ������Б���Vcc,��COM�g��VDD��VSS�g�B�Ӄɂ���·��ݣ��@�ɂ���ݼ�VB��VS�g�ă�����ݶ�Ҫ�c�����ͽ��B�ӡ����hVCC�ϵ���·�����һ��0. 1pLF���մ���ݺ�һ��lt.eF���g��ݲ�����߉�ԴVDD����һ��O.lVF���մ����������ˡ�ÿ��MOSFET���քe�B�ӵ�IR 2110��2�_��5�_����ŘO����̖�ķ���������һ���ŘO������������ʎ��
3.5���·
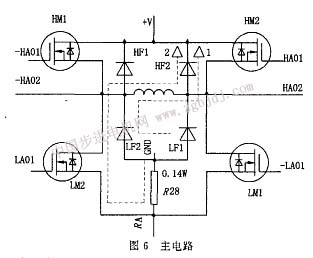
���·�вɘ����ķ��ú��v�������ڹ����^�̄՞錧ͨ���m�������������^�̣���Ҫ�������õ����ۙ�ԣ�Ҫ������̖���r�ط�ӳ���׃���Ġ�r�����ɘ��������m����·�����@�������̎�����·Ҋ�D6��
�m���ɷ֞���Դ�͟oԴ�ɷN�����ßoԴ�m�����t����늙C늸к���腢��׃���^������m����·�ĕr�g�����ܴ�������½������������\�е�����½����g�O�鲻�����oԴ�m���������Ϙ�ز�����ͨ����ģ��ʔ؆Θ��ֻ�����l��Ҫ�ߵĈ����Б��Ãrֵ��
���˸��ƟoԴ�m���r����½��^������r�����Բ�����Դ�m������ͬ�r���p������ͬ�r��ֹ�r�����l����Դ���ƣ���ʹ�@�M�е���������½����Ķ��������S�O����������Σ�ʹ��늙C�ڵ����l�ζ����M�����\�С�
����Դ�m���r������MOSFET�еļ������O�ܵĴ��ڣ�ʹ���m������ڵ��c�֞��·��һ·����ϣ����ͨ�^��Ͷ��O���m����Ҋ��·1������һ·�t����ͨ�^�ɘ����ͼ������O���m����Ҋ��·2��ʹ�òɘ�����ϳ��Fֵؓ��������ֵ�^��r���������Դ������TL494�����������������Ĵ�ʩ�����ӷ�ֹ�ͱ��ӷ�ֹ�ɷN�����ӷ�ֹ������MOSFET��©�O��늸�֮�g������һ����Ͷ��O�ܣ����܅������c�m����Ͷ��O��һ�ӡ��@��ʹ�K�������O�ܟoЧ��ֻ���¿�Ͷ��O���M���m�������ӷ�ֹ�t���뾫�ܙz���h������ȥֵؓ���Σ�ͬ�r��ʧ��ر���ԭ�е���ֵ���Ρ�
����Դ�m���r���òɘ�����@�N��ʽ�M�з����в���֮̎�������B�m������ηֳ����xɢ������Σ������^�˵��O��������Ξ��B�m��̖�������Ԅӿ�����Փ�����xɢ�����̖��횽��^һ���ɘӱ������������D�����B�m��̖����ܱ��͵����^���M�б��^�����w��������LF398�Ȳɘӱ�������
4�YՓ
���Ƶ�����������130BYG250�͡�8Aÿ�ࡢ28Nm�Ķ�����ʽ���M늙C�������õ��{�ٺ������ܡ��������ʽ���M늙C�����ӿ����\�ñ��ĵ�˼������ƏV��
�����īI��
[1]����Դ��S��M���W��˹�����Ҳ����� ���M늙C����������늙C��1997(5)�� [2]�T־�A����ԁ��һ�N�����ڸ߾��Ѽ��ֵĶ��ܭh����
[3]�T���ɣ�늙C���ƌ��ü����·[M]���Cе���I�����磬1998��
[4] ꐲ��r������τ��Ԅӿ���ϵ�y[M]���Cе���I�����磬1992��
���ߺ��飺�ֲ���1975-�����㽭ͩ�]�ˣ��㽭��W늙C�����ƌ��I�Tʿ�о������������d�������ڣ���Ҫ�о��������늙C�����ƣ�
|