|
��־�� �S�S�� ���V�|���WԺ��
��ժ Ҫ���������r����ʽ ���M늙C�����������һ�N���_��Ӌ�㷽�����Q������Ԫֱ��Ӌ�㷨��ԇ��C��������Ԫֱ��Ӌ�㷨Ӌ����������ֵ�ܱ��C����ʽ���M늄әC�нӽ����ȵ������\�У����ҿɌ��F����_���\�С� ���� �~������ʽ���M늄әC������ǣ�����Ԫ�����������
1 �� ��
���M늄әC���S�����c�����È���Ҳ�V�������������D��λ�ù��зֱ��ʵͺ��\��������ʎ�F���ȱ�c���˷��\�ܣ����c����Ч��ʩ����ʹ�������g������˦�h�ׇ������Ӽ��g���о��ܻ��S�����^���F��һЩ�����ܵ���������
���^�����Ʒ�ʽ���������Ã���ͨ늷�ʽ��ʩ�Ӳ�ͬ������ֵ����������ڲ��M늄әC�ăɂ���Ȼ��λ�c֮�g�������ɂ���λ�c����ԭ�Ѓɂ���Ȼ��λ�c֮�g�IJ���Ƿֳ����ɂ�С���������������Ʒ�ʽ�ܿ˷����M늄әC����ǹ̶������^�����β�푑����ஔ�ߵ��^�_������ʎ��ȱ�c���Ķ�����˶�λ���ȣ����С���ŷ��������ԣ�ʹ���M늄әC���c������ֱ���ŷ�늙C��⣻���ӔU�������đ��÷�����
���������Ƽ��g�������_�l���Ƹ����ܵ����������������ڲ��M늄әC���\�Еr������ȳ̶ȵ��о����������_�Ե��о���С�������_�Ե��P�I�����������ֵ��Ӌ�㡣���Č��������ֵ��Ӌ�㣬�����һ�N�µķ��������Q������Ԫֱ��Ӌ�㷨������һ����������Ե��A�ݜp�٣�Ȼ�����ԓ���ڸ����r�������ֵ����������Ԫ�����ԓ�����D�Ӯa�������ء����������λ�c̎����ϳ����ؑ������㣬�Ķ������һ���ڸ���λ�Õr�����ܮa��������ص��������ֵ��
2����ģ�ͼ����̵Ľ���
���ڷ���ʽ���M늄әC�����D���X֮�g��϶���ֵĴʼn���ռ���ńݵĽ^�֣���˶����D���X֮�g��϶���ּ����܇��ň�����׃����회�����Ԫ��������ģ�ͽ�����ԓ�^��
�Dl����һ�������X��Ć�λ�F�ĵ�Ƭ��Ȟ��Ԫ������λ��ȡ���X�����F�ă�һ���X��̎������߅���M����������߅��l����
ԓģ�Ͱ��������D���X�����X���|��λ�X���F�ĽM�ɵķǾ���ƽ�淀�����͚�϶�M�ɵľ���ƽ�淀������������������˹���̣��@�ɲ��օ^��ň���ƫ�ַ���߅ֵ��
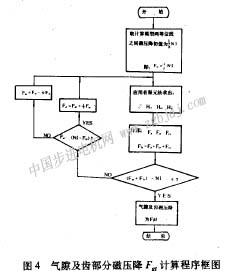
������Ԫ�����ƽ�淀���ň��ķ����ǣ�
�����ȏĽ�����ƫ�ַ���߅ֵ���l���ҳ�һ���Q�������������ķe��ʽ�������ڝM���һ�߅��l����ǰ����ȡ�Oֵ�������ɗl��׃�֡��@���l��׃���Ǻ�ƫ�ַ���߅ֵ�ȃr�ġ����l��׃�ִ���ƫ��߅ֵ���ԗl��׃�֞錦�����늴ň���
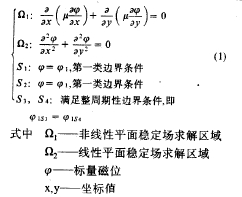
�ڌ��������^��ָ�����ނ������Ά�Ԫ����D2��ʾ����ÿһ��Ԫ�Ȳ��������J����һ�c��⺯�����چ�Ԫ���c������ֵ֮�g�S������׃��������׃�����چ�Ԫ�И������ֵ������
3�������ֵ������Ԫֱ��Ӌ�㷨
�������ֵ������Ԫֱ��Ӌ�㷨�ǻ��ھ�������Ķ�λ�c̎����������a����С��ȷ����෴�����؞�ԭ�t������֪һ��������ֵ�������һ����ʩ�ӵ������ֵ��
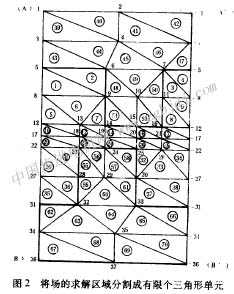
�麆��Ӌ������·�M�з���Ӌ��r��ֻ���]����ͨ늕r�Ĵ�·��������һͨ����
Ӱ푡�����ͨ늕r����·��ͨ·����D3��ʾ����϶���X���֣�������϶�������D���X�������D���X�����λ�X�߲����F�ģ��D3�Ю���б������϶���֣�����ʼn����˞�Fgt.���F���֣��������ӘO���������D��ܗ������ʼn����˞�F fe���ɲ��ִʼn���֮�͑����ڴ�·���ń�IN��ÿ�ల�ѣ�����
IN= Fg+Ft
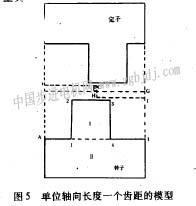
��λ�S���L��һ���X��ķ���ʽ���M늄әCģ����D5��ʾ���D���X�F�ĿɷֳɃɲ��֣�I���֞��D���X��II���֞��λ�X���F��jͨ���J���ֻ���ڏ���������ˣ�Ӌ���D���o�D�ؕr��ֻ��Ҫ���]I���֮a��������
��������˹�����^�c������գ���՚⣩�ň����κ����w�������ܵđ�������ͨ�^������ԓ���w�������M������˹���������e����ã�ԓ���棨���D���X���棩��λ��e���ܑ�����ʽ(2)��(3)��á������ķ��������
���D���X����đ�����Ҋ�D5�������طe��·��1- 2- 3-4��ã�Ҳ�ɰ��e��·��ABCGIF(��ADEHIF)��á� ����1-2-3-4��������׃���^��ABCGIF(��ADEHIF)�܇���׃���^С���څ^�ֆ�Ԫ��С����һ�r���t�x�÷e��·��ABCGIF(��ADEHIF)��õđ���Ҫ�Ȱ��e��·��f-2-3-4��õĽY�����_��
4Ӌ�㌍�����Y����C
����CӋ�㷽���ľ��_�ԣ�����һ�_�ζ�ʽ���෴��ʽ���M늄әC���ô˷�������������ֵ��ݔ�뵽�C���Ƶ�����������ȥ�����M늽ٙC���\�Еr��ʹ�ù�늾��a���M�������y�����@�þ��������rԇ�y�������ֵ�c������Ԫֱ��Ӌ�㷨������������ֵ�M�б��^������CӋ�㷽���ľ��_�ԡ�
4.1늙C����
�ζ�ʽ���෴��ʽ���M늙C��̖��SC-3
�~��늉���UN=28V
�~�������IN =.3A
�� ����m=3
����ǣ���b=3�ȣ�1.5��
4.2늙C�Ż������ķֶξ��Ի�
������l�в��M늄әC���Û_Ƭ����DG41. (0.35mm)�ĴŻ������M�зֶξ��Բ�ֵ̎����
4.3�����\�Еr�����D���X֮�g�Ŀ��g����λ��
SC-3�͆ζ�ʽ���෴��ʽ���M늄әC���p�����\�Еr��ÿһ�����^����֮һ�X�࣬��������\�У��tÿ_�������෴��ʽ���M늄әC�������ֵӋ�����^ʮ����֮һ�X�ࡣ
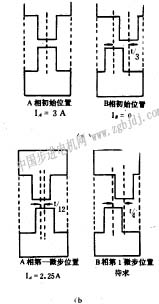
���OA������ֵ�Ӿ��ԏ��~�����ֵ3A�ֳ��Ă����A�ݜp�����㣮��A�������ֵ��3A��2.25A��1,5A��0.75A��OA�����ñ����������Ԫֱ��Ӌ�㷨����������r��ռ�����ֵ��
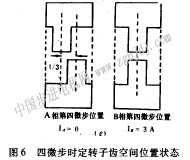
�D6a��b��c��d��e�քe��ʾ��ʼλ�ã���һ�����ڶ������������������������B�ඨ���D���X֮�g������λ�á�
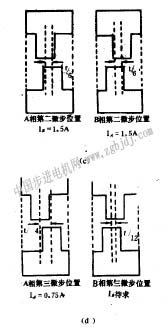
�ĈD6c�ɿ������ڵڶ���λ�ã�a���B�ඨ���D���X֮�g���S��������e�_t/6��Ҫʹ�����@�ô�С��ȣ������෴�����أ��@ȻB����ͨ���cA����ȵ����(��1.5A)���D6e������λ����Ȼ��λ�c�����@λ�ã�A�����ֵ���㣬B�����ֵ���~�����ֵ3A�����Hֻ��Ӌ���һ���͵������rB�����ֵ��
����Ӌ����@�ɂ���λ��B�������ֵ�����ȸ����D6b��d��λ�ã��������B����ԵĶ����D���X֮�g�Ŀ��gλ�ý�������Ԫ��Ӌ��ģ�ͣ�Ȼ����������ģ���M�к��������dž�Ԫ�ʷ֡�������ݔ��ƽ�淀���ň�������Ԫ��Ӌ������ԣ���
4.4Ӌ��Y����ԇ�y��ֵ���^
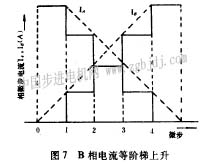
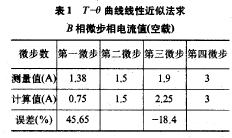
��1�е�Ӌ��ֵ�nj�T-O�������Խ��������B�������ֵ����һ������Ƿ֞������r���ٶ�A��������A���½�����Ի������t���A����������D7��ʾ��
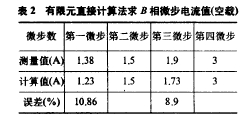
��2�е�Ӌ��ֵ��������Ԫֱ��Ӌ�㷨�����B�������ֵ��
5�Y�Z
�ı�l��֪����T-O�������Խ��Ʒ������Ӌ��ֵ�cԇ�ֵ���^���`��ܴ�2��������Ԫֱ��Ӌ�㷨�����Ӌ��ֵ�cԇ�ֵ���^���`���С�ڰٷ�֮11��������Ԫֱ��Ӌ�㷨������������ֵ�������������o����ʽ���M늄әC��늙C���@�ýӽ����Ȳ�������\�С���������Ԫֱ��Ӌ�㷨�ɴ_���������\�Еr�������ֵ���Ҳ���ԇ��O��l�������ơ�����Ԫֱ��Ӌ�㷨������˹�f������Ӌ�����أ��^֮�ôŹ��ܷ�Ӌ�����أ�Ӌ���^�̱��^���Ρ�����Ԫֱ��Ӌ�㷨�a���`���ԭ����
a�������˃���ͬ�rͨ늕r����ň����Ӱ푣��@�������`�����Ҫԭ��
b��늙C�����ϵ�ԭ�����϶�������X���������Ҳ����I���`�ߡ�
c����Ԫ�ʷּ��ֲ��Ƿ������Ӌ�����ķe��·���xȡ�Ƿ���m�������a��һ�����`�
������M늄әC��ؓ�d�\�У��tҪ���]ؓ�d�D�،������ֵ��Ӱ푡�
|