|
���ڰ�������C(j��)е�W(xu��)Ժ��
O�� ��
��(y��ng)���C(j��)���� ���M(j��n)늙C(j��)�ٶȵă�(y��u)�c(di��n)���`��㡢�ɿ��Ը��Լ���r(ji��)�͡����ľ� ���M(j��n)늙C(j��)��׃���^�̺�׃��ԭ������µĿ������Ա���õ��O(sh��)Ӌ(j��)���M(j��n)늄�(d��ng)�C(j��)���ٶȿ��Ƴ��� 1���M(j��n)늄�(d��ng)�C(j��)�ٶȿ���ԭ��
���M(j��n)늙C(j��)�IJ��M(j��n)�r(sh��)�g���xɢ�ģ����Ĺ����^������һ��ͣһ�µ�ѭ�h(hu��n)�^�̡�ֱ��1ֻ��������ٶ����������Q���nj�(sh��)�H���ٶ�������
��to�r(sh��)���M(j��n)�o�}�_Mo�����M(j��n)늙C(j��)��һ������λ�ƞ�l�����g��Ti��ģ��ڕr(sh��)���M(j��n)�o�}�_Mi�����������M(j��n)�ڕr(sh��)�g�^(q��)�g��ƽ���ٶ���
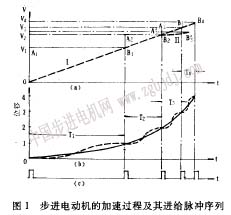
ƽ���ٶ�������Dla��ֱ����AiBi��ʾ���B�Y(ji��)0��Bi���c(di��n)������ʹֱ��OBi�������ٶ�����I�غϣ��eTiҎ(gu��)�M��
(a)����I��������������������Kֹ�ٶ���V2��V3֮�g�ļ���ԭ������OBIBZB
(b)�c����I����(y��ng)��λ��һ�r(sh��)�g����
(c)�c����I����(y��ng)���M(j��n)�o�}�_����
��L�������ɂ�(g��)�M(j��n)�o�}�_Mf_J��Mf�ĕr(sh��)�g�g������λ��s����Vi�鲽�M(j��n)늙C(j��)�ڕr(sh��)�g�g��( t/-/��ff)��ƽ���ٶȣ���λ�������룩���t
������(y��ng)��ƽ���ٶ������քe��ֱ���κ�Ai+iBi+i���B��Bi��Bi+i���c(di��n)��ֱ��BiBi+i����������I�غϣ��tT횝M��
���s��Vo=o�r(sh��)����������(4)ʽ�_��Ti������(2)ʽ���o���ĽY(ji��)����
�@���ٴΏ�(qi��ng)�{(di��o)ָ����y�Dz��M(j��n)늙C(j��)�ڕr(sh��)�g�g��T.��(n��i)��ƽ���ٶȣ�(3)ʽ��һ��(g��)���_�Ľ������_(d��)ʽ����?z��ng)Q�����M(j��n)�oһ�����ĩ�ٶȡ����M(j��n)늙C(j��)��f���r(sh��)�̵�ĩ�M(j��n)�ٶ�Vi�nj�(sh��)�Hλ����������Dlb��������ʾ����ti�r(sh��)�̵��о���б�ʣ���(sh��)�Hĩ�ٶ�Vi���y�ý���ʽ��ʾ�����\(y��n)��(d��ng)�W(xu��)Ҏ(gu��)�ɟo���������I�nj�(sh��)�H�ٶ�������Ҳ�o���������ti�r(sh��)�̵��ٶ�ֵ���ڡ�i��
������ķ������Կ������M(j��n)늙C(j��)���ٶȿ��ƌ�(sh��)�H���ǰ��ּ�(j��)�{(di��o)�ٷ�ʽ�M(j��n)�еġ�һ����r�£��Kֹ�ٶ��������LjDl���ϵĈA���c(di��n)����ô�ù�ʽ(4)�o���_����������һ��(g��)�}�_�r(sh��)�g�g��L��(y��ng)ȡ
��(d��ng)����ʽ���Ҷ˞��(y��n)��ʽ�r(sh��)���˕r(sh��)���M(j��n)늄�(d��ng)�C(j��)��T��(n��i)��ƽ���ٶ������Dz��������ٶ�����I�غϣ���λ������I���·������r(sh��)늄�(d��ng)�C(j��)�����һ��(j��)�ļ��ٶ�a
��(d��ng)����ʽ(5)���Ҷ˵ĵ�̖(h��o)�����r(sh��)�����������ٶ������ϵ�һ��(g��)�c(di��n)�����зQ�B�Ӿ��������ԭ��������
���һ��(g��)�M(j��n)�o�}�_�ĕr(sh��)�g�g������������֪�ĵV�����������(4)ʽ���Է��^���_��T��
������ԭ�������������ٶ������غϣ��t��(6)ʽ�f��m����
������ԭ�������������ٶ��������غϣ��t��
��(7)ʽ�ɿ�������(6)ʽ�_���M(j��n)�o�}�_�g���r(sh��)�g���tV1��λ��ԭ��������OBi�ă�(n��i)�c(di��n)��
���չ�ʽ(4)��(6)�_���M(j��n)�o�}�_�r(sh��)�g�g���քe������Ӌ(j��)��ͷ���Ӌ(j��)�㡣�������Ӌ(j��)��r(sh��)������ԭ�����������һ�Ρ��������������غϣ��t���շ���Ӌ(j��)�㣬����ԭ�������ĵ�һ��OC1�������������غϡ����������M(j��n)�o�}�_�r(sh��)�g�g��Ҳ����ͬ����������ĕr(sh��)�gҲ����ͬ�����ߴ���ǰ�ߣ������ֶ����ڰ��������������������õĕr(sh��)�g���D2�ǰ��շ���Ӌ(j��)���M(j��n)�м��ٵ�ԭ��ʾ��D��
����I���Kֹ�ٶȞ�V4�r(sh��)��������������Լ��������ԭ�������ͷ���ԭ���������������غ�
�����Kֹ�ٶ���V2��V3֮�g�ķ������
��p���^��ֻ�DŽ�����^�̵����^�̡����Մ����ԭ���_�����M(j��n)�o�}�_�r(sh��)�g�g�������������о͵õ������^�̵��M(j��n)�o�}�_�r(sh��)�g�g�����С�
���M(j��n)늄�(d��ng)�C(j��)�Ą��ٿ��ƾ���(ji��n)���ˣ������M(j��n)�o�}�_�r(sh��)�g�g�����ڹš�
��(du��)�ڲ��M(j��n)늄�(d��ng)�C(j��)���ٶȿ����������oՓ����ô��(f��)�s���������ֶξ��Ի�������ÿһ�ζ����������������N������١���p�١����٣��е�һ�N��
2�Y(ji��) �Z(y��)
��(sh��)�F(xi��n) ���M(j��n)늙C(j��)���ٶȿ��ƣ��P(gu��n)�I�Ć��}�����_�_�������ɲ��ĕr(sh��)�g�g������Ҫ�����@�c(di��n)��������_�����ⲽ�M(j��n)늄�(d��ng)�C(j��)���ٶȿ���ԭ�����Լ���һ��������Ӌ(j��)�㹫ʽ�� һ����r�£����M(j��n)늄�(d��ng)�C(j��)���ٶȿ�������������Ҏ(gu��)���õģ��ٶȿ������_�h(hu��n)���ƣ��]�б�Ҫ�����ھ�Ӌ(j��)������ٶȡ��r(sh��)�g�g��Ӌ(j��)��ʽ(4)��(6)ʽ�����^������ͨ���Dz����x��Ӌ(j��)�㣬��ø���(g��)7i��ͨ�^һ���ӕr(sh��)�r(sh��)�g���Ѷ�����������У�Ȼ���ձ���ַ����ȡ����һ���M(j��n)�o��Tֵ��ͨ�^�ӕr(sh��)������ߌ�(sh��)�r(sh��)�r(sh��)犿������a(ch��n)���o���ĕr(sh��)�g�g�����l(f��)������(y��ng)�IJ��M(j��n)����������ӕr(sh��)������@���M(j��n)�o�r(sh��)�g����ôCPU�ڿ��Ʋ��M(j��n)늄�(d��ng)�C(j��)���g������������������CPU�xTֵ���M(j��n)���ӕr(sh��)һѭ�h(hu��n)�����ӕr(sh��)�r(sh��)�g�������{(di��o)���}�_�����ӳ��ȷ��غ��؏�(f��)
���^�̣�ֱ��ȫ���M(j��n)�o�ꮅ��ֹ�������Ì�(sh��)�r(sh��)�r(sh��)犿��������ٶȿ��Ƴ���(y��ng)���M(j��n)�oһ������һ����T-[i]ֵ���붨�r(sh��)Ӌ(j��)��(sh��)���ĕr(sh��)�g����(sh��)�Ĵ�����Ȼ��CPU���M(j��n)��I���Д��B(t��i)����̎��������(w��)����(d��ng)���r(sh��)Ӌ(j��)��(sh��)�����ӕr(sh��)һ��������CPU�l(f��)���Д�Ո(q��ng)��CPU�����Д������푑�(y��ng)���D(zhu��n)���}�_������Д����(w��)����
�����īI(xi��n)
1�x��Ӣ����Ӌ(j��)��C(j��)���Ƽ��g(sh��)����(gu��)�������磬1985��12
2�����壬��Ԫһ���C(j��)���Ԅ�(d��ng)����ϵ�y(t��ng)�еđ�(y��ng)�ã��������Ї�(gu��)�F�������磬1987
|