һ�N���M�e�ֻ�ģ�����w���еđ���
���i���Oδ�ɣ����ď�����־��
�������Ƽ���W�Ԅӿ���ϵ�������Lɳ410073��
ժ Ҫ��ᘌ����y�e���ͻ�ģ�����a���e��͏Ķ����³��{�����ȱ�c����Seshagiri��Khalil�OӋ�ėl���e���ͻ�ģ��Ļ��A�ϣ������һ�N���M�e���ͻ�ģ�棬����Ը���ϵ�y�Ġ�Bͨ�^�{�����ӌ��e����M����������ֹ�e��ͣ�ͬ�r���{��Ŀ�ӵ�ȡֵ�����M����ӑՓ���������M�e���ͻ�ģ�摪�õ������ĸ������ٶȸ�ۙ��ģ�������OӋ�У�����Cݔ���ܵ��ɔ_����r�M���˷��棺��Փ�����ͷ����о����������M�e���ͻ�ģ����ʽ���Σ����ڹ��̌��F��������A���OӋ�Ļ�ģ���������ܵ�����}�_�ɔ_����r���]�г��{�;����^�̵��{���r�g��
�P�I�~���e��ͣ����M�e���ͻ�ģ�棻��ģ���ƣ��������ٶȸ�ۙ
�ЈD���̖��TP 27 �īI���R�a��A
1���� ��
��ģ���Ƶă��c�ǿ����������F������ģ�B��ϵ�y�Ĕz�Ӿ�����ȫ�İ��m���ԡ������ڲɘ��l�������ГQ�b�ò��ɱ���ش��ڑT�Ե����أ������H�Ļ���ģ�B���ǜʴ_�ذl���ڻ�ģ���ϣ���������ϵ�y�Ą��Ҷ��ɞ����ڌ��H�����е�һ���ϵK��20���o80���Slot/ne������ˡ�߅��ӡ�����������ͺ��������ГQ���̣��黬ģ���ƵĹ��̑����_���˵�·�����Dz���߅��ӃH�ܱ��Cϵ�y��B�Ք����Ի�ģ������ĵ�߅��Ӄȣ����·��B�`����ڣ�Chern�����ڻ�ģ����OӋ�������˷e��헁���Q���B�`��}��Bailk���@�N�e�ֻ�ģ�摪�õ�����ͬ��늙C�������OӋ�У�Shtessel���÷e�ֻ�ģ���OӋ�˟oβ�w�����ˑB����ϵ�y��X-33���d�����п���ϵ�y���mȻ��ģ��������e��헿��ԜpС���B�`�Ȼ���ڴ�ij�ʼ�`��͔_���£��e�֕����F�Ч���������ij��{���әC���������ʹ����ϵ�y����������ˣ�Seshgiri��Khalil�����һ�N�l���e�ֻ�ģ�棬���ё��õ�F-l6���w�п���ϵ�y�OӋ
���īI[6-7]�Ć��l�����������һ�N���M�e�ֻ�ģ�棬�����˗l���e�ֻ�ģ�挦�e��헵������̶Ȳ����{�������ƣ������䑪�õ������������ٶȸ�ۙ��ģ���������OӋ�С�����Y��������������ĸ��M�e�ֻ�ģ�����һ���Ĺ��̑��Ãrֵ��
2�e�ֻ�ģ���OӋ
1)���y�e�ֻ�ģ�挦�ڸ�ۙ���ƣ���Ҫ�OӋ������ʹϵ�y��ݔ��y��ۙ����ݔ��y��������
���y�e�ֻ�ģ��һ���OӋ��������ʽ��
�����õ���څ���ɣ���ʽ(2)��
����Ŀ����ɿ�����ʽ�õ���
�������ƶ�������߅��ӷ�������ͺ���sat(S/��)����ʽ(3)�еķ�̖����sgn(S)������sat��S/�̣��Ķ��x���£�
ʽ(2)�еķe��헳��Á�pСʹ��߅��ӷ����������ķ��B��ۙ�`������푑��ٶȡ�
2)�l���e�ֻ�ģ����y�e�ֻ�ģ���еķe����ڴ��ڴ�ij�ʼ�`��r���e�֕����F�Ч���������ij��{�����^�L���{���r�g�������������әC���ʹϵ�y��������Seshagiri��Khalil�����y�ķe���ͻ�ģ���еķe������˸��M�������һ�N�l���e�ֻ�ģ�棬�䌢ʽ(2)�����µĸ��M��
ͬ�r���������V�`��ĸ���䶨�x��
�����3�N��r�M��ӑՓ��
��ʽ(7)~ʽ(9)��֪����߅��Ӄȕr����=ea(t)�ǂ��y�ķe�����ã���߅�����r���e��������ܵ����������īI[6-7]�еķ���Y���������l���e�ֻ�ģ�����^����Ч�ط�ֹ�e��ͣ�����e��͌��µĴ�ij��{����
3)���M�e�ֻ�ģ���OӋ��Seshagiri��Khalil������ėl���e�ֻ�ģ�����ȱ�c����߅����OӋ��ɺ�p�x��������߅����⌦�e��������̶Ȟ�lS|-�̣������ܸ������H��r�M���{����
�������һ�N���M�e�ֻ�ģ�档��ʽ(5)�����µ��ģ�
��ʽ(11)~ʽ(13)��֪����߅��Ӄȣ���=ea(t)�ǂ��y�ķe�����ã���߅�����e��������ܵ����������������̶ȿ��Ɂ��������ʿ��Ը���ϵ�y�Č��H��rͨ�^A���{���õ����m�������̶ȣ�����ʽ(10)�cʽ(2)���տ�Ҋ�����M�e�ֻ�ģ��ֻ�ǰѻ�ģ���еķe��������OӋ���]�����̌��F���y�ȣ�
ע1 ��=0�r���īI[6��7]����ėl���e�ֻ�ģ�棻��=-l�r�ǂ��y�e�ֻ�ģ�档
3�{������ȡֵ����
��ʽ��11��~ʽ(13)��Ҋ����Ҫ��߅��������e�����������ã��ˑ��M�㣺
�Ҟ��˱��ַe�������ļӿ�푑��ٶȵ����ü���
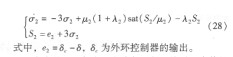
��ʽ(14)��ʽ(15)�õ��˵�ȡֵ������
�ڌ��H�������OӋ�У��ɸ���������_��A�ľ��w��ֵ��
4�������������ʸ�ۙϵ�y�OӋ
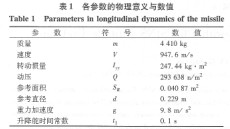
�����Ŀv������Wģ��.���]ij�����Ŀv������Wģ��
�������w���ٶȞ�3Ma,�w�и߶Ȟ�6095m,|����20�ȕr��
������Ą����W���Խ��ƽ�ģ��һ�A�t�ӭh����
ʽ(20)~ʽ(24)����̖���������x�͔�ֵ��Ҋ��l��
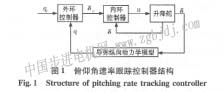
2)���������ʸ�ۙ�������OӋ���]�����Ŀv������Wģ�ͺ�����������W���ԣ����Õr�g�߶ȷ��xԭ���OӋ����ɭh��ۙ���������������Y����Dl��ʾ��
��h�������a����ۙ������ָ��qr����Ҫ��������ƫ��ָ����̖��c���ȭh�������a���_����ݔ��ָ�ʹ�������ݔ���ĸ�ۙ��c��
��h���������OӋ��
��ʽ(18)��ʽ(19)��֪��ϵ�y�������A��1���OӋ�ĸ��M�e���ͻ�ģ���
�������]d������S����������߅��Ӻ͵���څ���ɣ��ɵã�
����ʽ�õ���h��������ݔ����
�ȭh���������OӋ��
���]��Cһ����****ƫ�����ƣ��ʲ��ó�ֵ�ГQ��ʽ��
ʽ�У��˵�ȡֵ��****ƫ�ǛQ����
5�����о�
���挧���ĸ������ٶȸ�ۙ������̖�������ķ��慢��Ҋ��l���O��d1=d2=1����10 s��20 s�r����Cݔ���ܵ���4��������}�_�_�ӣ�����10 s��20 s�ȼ��d��4�ȸɔ_�����քe���ڂ��y�e���ͻ�ģ�桢�l���e���ͻ�ģ�桢���M�e�ֻ�ģ���OӋ�������ٶȸ�ۙ�����������N���ε���h��������c������10��߅��Ӻ��p������0 4�����M�e�ֻ�ģ�������OӋ����A��0.6���ȭh�������е�A����30��߅��Ӻ�ȸأ�����0 1������Y����D2���D3��ʾ��
�D2�o����10 s�r��Cݔ���ܵ�����}�_�ɔ_�r�ĸ�ۙ�`���������D3�o����20 s�r��Cݔ���ܵ�����}�_�ɔ_�r�ĸ�ۙ�`����������Ҋ�����ڸ��M�e�ֻ�ģ���OӋ�Ŀ��������кܺõĸ�ۙЧ�����ܵ��ɔ_����]�г��{�����{���r�g�������ɷN�١�ͬ�rҲ��Ҋ�����ڗl���e�ֻ�ģ���OӋ�Ŀ��������܃��ڂ��y�e�ֻ�ģ���OӋ�Ŀ�������
6�Y�Z
���������һ�N���M�e�ֻ�ģ�棬��ͨ�^�{�����ӌ��e����M�������������䑪�õ������ĸ������ٶȸ�ۙ�������OӋ�У�ͨ�^�����Ҋ����ϵ�y�ܵ��_�ӵėl���£����M�e�ֻ�ģ�����������܃��ڂ��y�e�ֻ�ģ�������͗l���e�ֻ�ģ�����������M�e�ֻ�ģ����ʽ���Σ������ڌ��F����һ���Ĺ��̑��Ãrֵ��
|