|
���^�� �w�W ���ң��������պ����W100083��
�����S ���x���������I���I��W��
ժ Ҫ �OӋ��һ�N���ڽ�����-���ص�ͨ���� ���M늙C����ϵ�y��ԓϵ�y��һƬ8031��Ƭ�C����CPU�����������~�����3A���µ����ࡢ���ࡢ���෴��ʽ���M늄әC�����ӡ��������`���ܛӲ���OӋ��ϵ�y���Է���������}�_�ӡ�RS232�ӿڡ�CTD�����ӿڵȈ��ϡ��������ؽ�B��ϵ�y��ܛӲ���OӋ�� �� �~ ���M늄әC����ͨ��ܛӲ���OӋ
1 �� ��
���M늙C��һ�N�܌���}�_��̖�D�Q�ɽ�λ�ƺ;�λ�ƵĈ���Ԫ������������в����ʴ_�����_�h���ơ����ڔ��ֿ��Ƶȃ��c���V�����ڸ��N���ЙC���ϣ�Ҳ�ǽ����͔��ؙC��������õĈ���Ԫ��֮һ[1]�����M늙C�������c�����·�������P��������߲��M늙C�IJ��M�ֱ��ʣ�������ʮ����Ч�Ĵ�ʩ[z]�����⣬���ò��M늙C���ӣ������ÙCеֱ�ϣ�ʡȥ�����g���ӭh�������Hʹ�M�o���ȵõ����C��Ҳʹ���M�oϵ�y���l��푑������ߡ��S�����ؼ��g�İlչ�����Ӽ��g����õ����ƣ����F�˶�N���������ǣ�Ŀǰ���ȵ�������������ᘌ�ijһ�N��M늙C�����OӋ�ģ�ͨ�����^������ͨ�������r���ֱ��^���F�����Ҍ���ӿچ�һ��ͨ��ֻ��RS232�ӿ�[3]����ˣ�����һ�Nͨ�õ���ϵ�y���б�Ҫ���@�N�������������ׂ����������·�������ã����ĵ͡�Ч�ʸߡ��w�eС��ͨ���Ժã�����������һ�������ܿ��ƹ��ܣ�����Ӳ���Ľپ����Ӷ�N���M늙C���ӿڶ࣬�����ܽ����}�_��̖�⣬߀����RS232�ȶ�N�ӿڣ��Ա������ϵ�yͨӍ��ʹ�䲻����һ��������������������һ��������ģ�K��
���������}���{��������Ƽ��g�͆�Ƭ�C���g�OӋ��ͨ���������M��������Ҫ�����Ќ�������ܛӲ���OӋ����Ԕ����B��
2��ϵ�y��Ӳ���OӋ
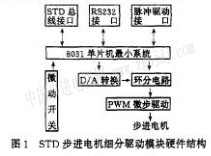
����Ӳ���Y����D1��ʾ������������ͨ���Ͳ��M늄әC����ϵ�y�·�����·�ͽӿ��·�������֣��OӋ�·�r��������STDģ��ߴ��OӋ��
�����·��Ҫ�Ɇ�Ƭ�C��Сϵ�y���g�a�������_�P��DlA�D�Q�ͭh���·�M�ɡ����_�P�c��Ƭ�C8031��Pl�����B�����ڲ�ͬ���ϵIJ��M늙C�����O�á����֔��O���Լ���ͬ�B�ӽӿڵ��O�á�8031��Ƭ�Cϵ�y�ǿ����·�ĺ��ģ����ڲ�ͬ��Ҫ��ܛ�����ӳ�����Д���ճ���惦�ڳ���惦���С����в��M����r����Ƭ�C��늙C��������Ĕ�����ݔ�뵽D/A�D�Q���Ĕ����˿ڣ�D/A�D�Q����ģ�Mݔ�������h���·ݔ�ͽo���·��DlA�D�Q���ɸ����D�Q���ȵ���Ҫ�x��8λ��DAC0832��12λ��DAC12 30��ֻҪ��׃������ܛ�����ɡ�
���·�����}���{�Ƽ��g���F�����и���ƽ������Ŀ��ƣ��}���{���Ɍ��ü���оƬTL494��ɣ��������·���OӋ�������·�Ŀɿ��ԺͿ��ɔ_�����������ߡ��}���{�ƺ�����������̖׃�ɲ�ͬ�}�_����ͬ�l�ʵ�һϵ���}�_�����@Щ�}�_���c�����·��ݔ�����B�����ƹ��ŹܵČ�ͨ���P�ࡣ�ڿ��Ʋ�ͬ�������r�����Ź�ʼ�K�������_�P��B���l���٣�ʡȥ��ɢ���b�ã��pС�����·���w�e���@�ǹ��Źܹ����ڷŴ��B�r�����������ġ���ĩһ�����Źܲ���VMOS�ܣ�����һ�N늉�����Ԫ�������������Ҫ��ܵͣ����ǿ��]�����Դ�g����ݣ�������ݔ�뼉ǰ��������һ�������ӣ�ʹ���}�_�������غ��½��ض��ܶ������ŹܵČ�ͨ���P���^�ɕr�g���̣��Mһ�������˹��ʓp�ġ����ڲ�ͬ�~������IJ��M늙C��������̖�ķŴ������{�������`���������OӋ�����·�����~�����С��3A���µķ���ʽ���M늙C�����m�õġ�
�ӿ��·�Ķ�����ʹϵ�y���m���Ը�������ϵ�y�OӋ�У������Æ�Ƭ�C��P3,3��P3.4����ϵ�y���}�_�ӽӿ��⣬߀����1488��1489�Uչ��RS232�ӿڣ����Ã�Ƭ�����i�����Uչ��STD�����ӿڣ��@��Ҫ�dz���ϵ�y���ڶ��S�ӿ��ƕr�Ŀ��]�����⣬Ӳ����߀��555�OӋ���}�_�l������ʹϵ�y���Ԫ��������ڲ��M늙C��ͬ�ٶ��µ��D�ӡ�
3 ϵ�y��ܛ���OӋ
ܛ���OӋ�DZ�ϵ�y�m���ԏ����P�I�����OӋ��ͻ�����c����ͬһ�·�����ø�׃Ӳ���B����ֻҪ�OӋ��ͬ�Ŀ���ܛ�����Ϳ��Է����`��،��F��N���Ʒ������D2��ϵ�y��ܛ�����w�Y�����D��
3.1ᘌ���ͬ�������M늙C���OӋ
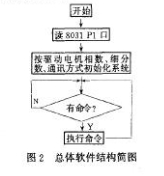
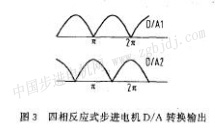
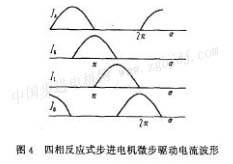
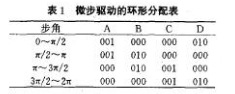
���OӋ�п��]��ϵ�y�������ڶ�N���M늙C�����c����˿������������ࡢ���ࡢ���෴��ʽ���M늙C�����Ҫ�����ӵIJ�����Ǿ���ģ����ڲ�ͬ�����IJ��M늙C����ʹ�~�������ͬ��������IJ���Ҳ�Dz�һ�ӵġ�Ҫ���Fһ���������ڲ�ͬ������ε��ӣ�����Ӳ���·�Ǻ��y���F�ģ�������ܛ�������öֻ࣬�茢�xɢ�IJ�ͬ������δ惦�ڳ���惦���IJ�ͬ�^��8031��CPUʹ�Õr���_�{�ü��ɡ����⣬���ڲ�ͬ�����IJ��M늙C���h�з�����Ҳ�Dz�ͬ�ģ��@Ҳ��ܛ���h���F����ͬ�ĭh�ֱ��Ա����惦�ڳ���惦���У��ڳ�ʼ���r������Ҫ�{��ȴ棬�ڳ����п���ģ�M�_�P���xͨ��̖���������෴��ʽ���M늙C�r����ƬD/A�D�Q��ݔ��������D3��ʾ���������xͨ��̖�քe��001��010��oVģ�M��̖���������xͨ��̖��000�������ĭh�η�������DZ�1����ʽ��늙C�@�M�a����D4��ʾ������������Ρ�ϵ�y���ⲿ����Ϣ���Q�����`����ӣ�������STD�����ӿڣ������x��ַ���ⲿ����ͨ�^��ͬ���������ϵ�y�Ą�����
3.2ᘌ���ͬͨӍ��ʽ���OӋ
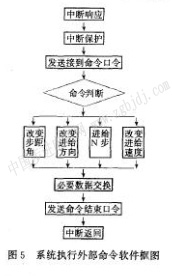
��STD����ͨӍ��ʽ�r���ⲿ������ϵ�y8031��CPU��Ո�Д࣬ϵ�y����Ĉ��п��Д���ճ�����ɡ�ϵ�y�ӵ��Д���Ո�������ⲿ�l��푑����Ȼ��ϵ�yᘌ���ͬ������������IJ����������ⲿ�l���������ϵ�yᘌ���ͬ������������IJ����������ⲿ�l���������֪ͨ�ⲿ���D5�o�����c���ͨӍ��ܛ����D��ϵ�y��8031�������д���ͨӍ���������cRS232���B���ܺ��Σ��mȻ����ͨӍ�����^������ϵ�y���ڶ��S�ӿ��ƕr���c�C�ɲ����@�N��ʽͨӍ��ܛ��������Ĉ����cSTD����ͨӍ��ʽ���ơ���1���ӵĭh�η����
3.3 ��׃������OӋ����
��Ӳ���·�Ľ�B�п�֪����ʹ��ǰ����ͨ�^���_�P�O�ò�ͬ�����ࡣ����һЩ���È��ϣ�����nj��r��׃�DZ�Ҫ�ġ�����늻ӹ��ŷ������У����ܼӹ��r���M�o�ٶ���������g϶С���������_�ظ�ۙ����g϶�������ӹ���Ҫ���M�o�����С�����ڿ��d�M�o���·���˕r������Ǒ�ԓ�^��ʡ�r�g������ϵ�y�ж�NͨӍ��ʽ������ǵĸ�׃�ͺ����ˣ�ֻҪ���x��׃����ǵ�����ɡ�ϵ�y��DAC0832��DlA�D�Q���r�����]�D�Q�`�����40���֣�׃������������20��10��8��5��4��2��1�߷N���֔��O�ã�������֔�����ȸ��ߣ����x��DAC1230����DAC0832��
4�Y�Z
���`������ϵ�yͨ���ԏ����ɿ��Ժá���ȫ�ԏ���
|