���xLyapunov������
�ɵ�Lyapunov�����ط���(5)��܉�E�Č�����
��������Ƶ��^�̿��Կ������������]�ɔ_��ʽ(7)���[������ʽ��V(x(t)��0) <0������Lyapunov�����Զ�����ϵ�y(5)��һ�u�������ģ������]�hϵ�y(4)Ҳ��һ�u�������ġ����ʽ(7)���]�ˈ�����ʧЧ����r�������]�hϵ�y(4)Ҳ�������ɿ�悶��ġ�
��Σ��C����ꇲ���ʽ(7)�DZ��C�]�hϵ�yʽ(4)�����ʼ�l���¾����ա��������н硣
���O���Bx(t)=0�������M������
ע����ڹ����]�hϵ�y�����������Ա��C��||z(t) ||���н��Ժ�limx(t)=O�������ʼ�l���£�������w(o)��L2[0����]�������²���ʽ������

�t���ڠ�B����������u(tһd(t)) =Kx(tһd(t))ʹ�ù����]�hϵ�y(4)������H
���ɿ�����ϵ�y���ҿ����������K= YX
-1��
�C���Ì��Ǿ�ꇷքe��˺��ҳ�ʽ(6)��������Schur�a�����ɵõ��ȃr�ľ��Ծ�ꇲ���ʽ(10)�����У�X=P-1��y= KX��Q =xQx��S�cX�M��S��X���C����
4��������
�xȡһ��4���ɶȵĽY��ģ�������о����������ģ�͵�ԭʼ�����������īI[4]��ϵ�y����ӷ�����ʽ(1)�o����ϵ����ꇞ�
�C���������o��������y>0���������������ʧЧ��rL�ʦ��������ڌ��Q�������P��Q��S�����Kʹ��ʽ(6)�������t�ܸɔ_�Ĺ����]�hϵ�y(4)�������ա��ɿ�����ϵ�y���ҿ����������k�����ˣ�����1���C��
����ʽ(6)���Ǿ��Ծ�ꇲ���ʽ�����˱��ڔ�ֵӋ�㣬����ͨ�^����2�����D���龀�Ծ�ꇲ���ʽ( LMI)��
����2���]���Еr׃ݔ��r���IJ��_��ϵ�y(4)���o��������7>0���������������ʧЧ��r��tn�������ڌ��Q�������x��Q��S�;��Y���ҝM��s -x��0ʹ�������ꇲ���ʽ������
w(t)��El Centro( NS��1940)�����ٶ�x0(t)����ֵ��0 34 g���ɘ����ڞ�0.02 s���xȡ�����ҵ�ǰ10 s�M�з��档���������d��ȡ0.1��
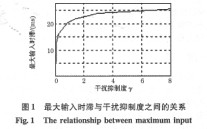
���ȣ����]����������ʧЧ��r�£���****ݔ�����Tmax�c�ɔ_���ƶ�y֮�g���Pϵ�M���˷����о�����ȡ����ͬ��vֵ���Y�϶���2��LMI��������Եõ���ͬ��****�r��ֵ�c�������B����������D1��ʾ��
�������ƶ�yֵԽС��ʾ�Y��ϵ�y����������������Խ������ˏĈD�п��Կ����Y��ϵ�y�����S��****ݔ�����ֵ�S������������������������pС��ԓ�Y���ڹ����x��Ӳ���O��r�ܾ���ָ�����x���e��Ƭ�C���\���ٶȡ������������r�g�͈�������푑��r�g�ȡ�
Ȼ��ݔ�����Tȡ15 ms��7ȡ0 5���ҿ��]����������һ��ʧЧ��r��ͨ�^������2�M�����õ������������ꇣ�
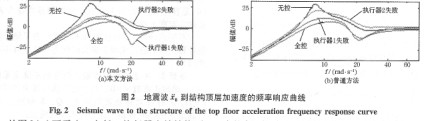
����Ϊ��z�ϵ�y�Ŀɿ��ԣ��oݔ��������������ʽ(4)���õ��ڈ��������NʧЧ����r�µ����ٶȵ��Y��플Ӽ��ٶȵ��l��푑��������ڈ�����ʧЧ������ͨ�������]���e�ģ��������������µ��l��푑���������D2��ʾ��
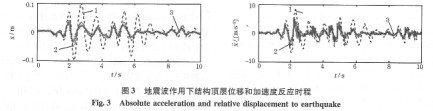
�ĈD2(a)�ɿ���������һ������ʧЧ�Y��플�****���ٶ��ڲ�ͬ�l�ʵ��������¾��кܺõ����������������f��ԓ���ƵĿɿ����^�����D2(b)�c�D2(a)���^�������@�l�F��ͨ�ա������㷨���Ј�����ʧЧ�r����������������^����������e���ܡ����Ŀ������OӋ�����������漰������ȫ�Č��H��ӹ��̑��������^��ĸ������á��C����Cԓϵ�y�ھ��Еr׃ݔ�������r�����Ј�����ʧЧ�r�Ƿ��Կ��ԝM����������Ҫ������S��muimkܛ���ģ�K�����У�����ݔ�����ȡ15 ms��������K��׃������õ��Y��플ӵĿ���Ч������D3��ʾ��
�D3��1��o�أ������ӿ��ƣ���2�������ʧЧ��3��ȫ�أ���������������������1�c����3ͬ�r���^��λ�Ʒ���ƽ�����ưٷ�֮60�����ٶȷ���ƽ�����ưٷ�֮45���f�������������S�����ȿɴ���ݔ��������Mһ���f��ԓ�����������e������
5 �Y �Z
����ᘌ��Y����ӿ����г�Ҋ���}�������ݔ���������ʧЧ������������ͣ��Y�ϬF��������Փ�е������ա����e�����㷨���һ�N�������OӋ��������ͨ�^���挍����Cԓ���������^��
�đ����ԣ�늞���ľ�Y������ӿ����ṩ��һ�N��ȫ�ɿ����^�й��̌������x���о����������⣬�� �ñ������õ���ݔ��r���c�ɔ_�����g���Pϵ���ڌ��H�������x��Ӳ���r���ܺõ�ָ�����á�
���Mһ�����Y�����ϵ�y�đ������о����ڝM��������������Ҫ��Ļ��A�ϣ����Y��ϵ�y���Y�� �����z�ӵ��������Լ��Y��ϵ�y�ķǾ��ԵȆ��}�M�����^������о������P�������Ľ�B��