��Ԫ�C�M��С���W�j�V�x�A�y����
��������쿡�壬�����
���ɹŹ��I��W��Ϣ���̌WԺ�����ɹź��ͺ���010080
ժ Ҫ��ᘌ����ͻ�늙C�M���п��ƌ�����s���Ǿ��ԡ������ģ���y�Խ��������c���OӋ�f�{����ϵ�y�Ŀ��Ʋ��ԡ�С���W�j�������õĺ����ƽ�������ģʽ����������V�x�A�y���ƌ����^���s�Ĺ��I���a�^�̳ʬF���õĿ������ܺ������ԣ�ͨ�^Ӗ��С���W�����ͻ�늙C�M��ģ�õ��A�yģ�ͣ�Ȼ��������ģ�ͱ��R�^�����ѫ@�õĔ�����Ӌ��V�x�A�y�����ʣ������ˏV�x�A�y�������G���D���̎����ھ�Ӌ�����^���ȱ�ݶ�����Y��������ԓ�����ܱ��C���ʡ���������������ƽ���ظ�ۙ���O��ֵ�������^�õ������ԣ����Q���͆�Ԫ�C�M�f�{���Ɔ��}�ṩ��һ�l��Ч��;��
�P�I�~����Ԫ�CŤ��С���W�j���V�x�A�y����
�ЈD���̖��TP 273 �īI���R�a��A
1����
��늏S���͆�Ԫ�C�M���ƌ�����зǾ��ԡ�����ϡ������ģ���y�Ԝʴ_���������c�����ڏ��s�y�صĴ������a�^�̡��ڳ�Ҏ�ֲ�����ϵ�y���A�ϰlչ�����ąf�{����ϵ�y�ǽ�Q�@�����}����Ч;�����f�{����ϵ�y���Ʋ��Ե��OӋֱ�ӛQ����ϵ�y�Ŀ���Ʒ�|����ˣ����M���Ƽ��g�����еđ����о�������YԴ�����ʺͱ��C늏S�İ�ȫ�����\�о�����Ҫ�����x��Ŀǰ��С���W�j���䪚�صă��c�������˂��ĘO���Pע�����ɞ�Ǿ���ϵ�y��ģ�c���Ƶ���Ҫ�������A�y�����ǽ�����lչ������һ�N���͵�Ӌ��C�����㷨�������䌦ģ�͵���ه���������ڌ��F�����ƵľC��Ч���õ��T�����c���ڹ��I�^�̿����еõ��ˏV���đ��á�
��������С���W�j�����͆�Ԫ�C�M�M�б��R���A�y���ÏV�x�A�y���Ʒ����M�п��ƣ����Q���͆�Ԫ�C�M���{���Ɔ��}�ṩһ�l��Ч��;����
2С���W�j�V�x�A�y�����㷨
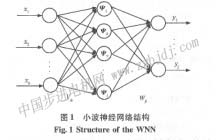
1)����С���W�j���A�yģ�� С��׃�Qͨ�^�߶ȵ���s��ƽ�ƌ���̖�M�ж�߶ȷ���������Ч��ȡ��̖�ľֲ���Ϣ���W�j�����ԌW�������m�������e�Ե����c����һ�ͨ�õĺ����ƽ������Y���W�j��С�������ă��c��1992�꣬Zhang Qinghua��Benveniste���������С���W�j( WNIY)�ĸ�����㷨�ڡ�С���W�j�Ļ���˼������С��Ԫ������Ԫ�������Ѷ�λ��С����������Sigmoid�������������ͨ�^����׃�Q������С��׃�Q�c�W�j����֮����ϵ��С���W�j�܉�ͨ�^Ӗ�����m�����{��С�������Π�FС��׃�Q��ͬ�r�������õĺ����ƽ�������ģʽ�������j3j����ݔ���ݔ��С���W�j�ĽY���D����D1��ʾ��
�D�У�Xk��ݔ��ӵĵ�k��ݔ��ӱ���yj��ݔ���ӵĵ�j��ݔ��ֵ��Vik���B��ݔ��ӹ��ck���[�ӹ��ci�ę�ֵ��wij���B���[�ӹ��ci��ݔ���ӹ��cj�ę�ֵ��
��ai��bi�քe���[�ӵ�i�����c����sƽ��ϵ����p��ݔ��ӱ���ģʽ������m��ݔ��ӹ��c������n���[�ӹ��c������N��ݔ�����c������
�t�W�j�[�ӵ�i�����cݔ���
�[�ӵ�i��ݔ������ĸС���������^��sƽ�ƺ�a��һ�MС�������������W���_ʽ��
ݔ���ӵ�j��ݔ���
�tС���W�j��ģ�Ϳ��Ա�ʾ��
������С���W�j�����`�����f�㷨�M��Ӗ�������m�����{��С����sƽ��ϵ���;W�j��ֵ�����Oxbp���p��ģʽ�ĵ�k��ݔ�룬yjp���p��ģʽ�ĵ�j���W�jݔ����Ⱥ���p��ģʽ�ĵ�j������ݔ�������x�`�����
����ʽ(4)Ӌ���`���ƫ������
���ݶȷ�������ֵ��������W���ʦǺ̈́������Ӧ����t
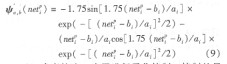
���]��MorletС���ĺ������_��ʽ���x��MorletС������W�j�[�ӵ�׃�Q��������
�tʽ(6)�еĦ�a��b( netp)����ʽ(9)��ã�
2)����܉�E�����M���ữ���ƣ����Ƶ�Ŀ�IJ���ʹݔ��ֱ�Ӹ�ۙ�O��ֵ�����Ǹ�ۙ����܉�E������܉�E��ʽ(10)�a����
����������ʽ�ą���܉�E�����p���^���Ŀ������ã�ʹϵ�y��ݔ����ƽ���ĵ��_�O��ֵ��
3)�L�Ӄ���������ϵ�y�������ԣ�������ָ�˺����п��]�ˬF�ڕr�̵Ŀ���u(k)��ϵ�yδ��r�̵�Ӱ푣�������
ʽ�У�N1��****�A�y�r��M����ƕr��i��әೣ������u�����������yp(t+i)��С���W�j�A�yģ�͵ó���yp(t)���O��ֵ��
4)����У����С���W�j�A�y�����㷨�У�ÿһ����Ҫ�z�y���Hݔ�������cģ��ݔ�����Ա��^�����`����Ϣ��Ȼ���Դ��`����Ϣ��С���W�jģ���M�ЌW�����������@һ�^�̿����ھ��M�У�Ҳ�����x���M�С���M�����ϵ�y���r�Ե�Ҫ��ͨ�������ھ��W�����������O���H����ݔ���cģ��ݔ��֮�g���`����ʽ(12)��ʾ��
�t�õ�����У����ģ�͵��A�yݔ����
ʽ�У�k���`������ϵ����
5)С���W�j�V�x�A�y�����Ƀ���Ӌ���ǽ���������С���W�j�A�yģ�͵Ļ��A�ϣ�Ҫ�@��****�����ɣ���Ҫʹʽ(11)��ʾ������ָ�˺�����څ����С��
�t��ÿһ�ɘӕr�̣�ʹ���ݶ��½����@�ÿ��������£�
ʽ�У�p������ݶ��½�����ȡA�r�ă������L��
��ʽ(15)����ʽ(14)�ɵã�
�����V�x�A�y�ĝL�Ӄ����������ɞ�
�ɴ˿�Ҋ�������ɵ����ɽ�������С���W�jģ�͕r�ѵõĔ������c���ÁG���D�����Ȝp����Ӌ�������ӿ���Ӌ���ٶȡ�
С���W�j�V�x�A�y�����ھ��㷨�ɚw�Y�����²��E��
Step lʼ��С���W�j�A�yģ�ͼ�������������
Step 2�ɘӱ��،���ݔ��ݔ������������ʽ(7)�ľW�j��ֵ��
Step 3��ʽ(17)��������ɡ�
Step 4����Step2��
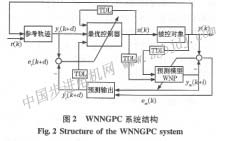
�����������IJ��W�j�V�x�A�y����( WNNGPC)��С���W�j�A�yģ�͡������������ͷ���У�������֘��ɣ���Y������D2��ʾ��
3�����о�
��늏S偠t�����C�f�{����ϵ�y���^�������������Կ����pݔ���pݔ��ϵ�y������2��ݔ��������݆�C�{���y�_��ָ��UT��偠tȼ����ָ��UB��2��ݔ������C�M���l����PVE������������P=300 MW��Ԫ�C�M�ڂ��f������ʾ���£�
1)��Ԫ�C�MС���W�j���R���汾���е�С���W�j����3�ӣ�ݔ�����6�����c���քe��UB��k����UB��k-l����PT��k-l����UT(k)��UT��k-l����NE(k-l)���[�ӽ�����ԇ�_����15�����c�����������ʽ(8)��MorletС��������ݔ������2�����c���քe��NE(k)��PT(k)��
�W�j��ֵ���xȡ���W�j�Ք��ٶ���ֱ�ӵ�Ӱ푣�������ԇ���ĵľW�j��ֵ�xȡ���£�
�� wij��0 5 -0 5֮�g���S�Cֵ����Vik��-0.5~0.5֮�g���S�Cֵ����ai��0 0~O l֮�g���S�Cֵ����bi��0 8~0.9֮�g���S�Cֵ��
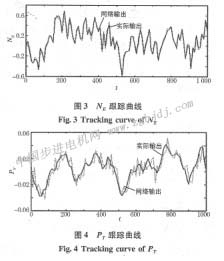
�ɘӕr�g10 s������r�g1 000 s��С���W�j���Øӱ�����Ӗ��1 000�κ��������ľW�jģ��ݔ���c���Hϵ�y��ݔ����������D3���D4��ʾ��
�D3������S�C��̖�r��������ۙ�������D4������S�C��̖�r��P���ĸ�ۙ�������ĈD3���D4�п��Կ��������Hģ���cС���W�j�ھ�����ͬݔ��r������ݔ��֮�g����С���������غϣ�С���W�j����Ԫ�C�Mģ���M���˾��_�ƽ���
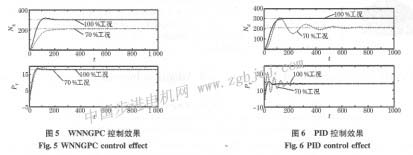
2)����Ч��������********ؓ�ɕrȡ�ɘ�����T=10 s������r�g1 000 s���A�y�r���L��N��=10�����ƕr���L��M =3�����ƙ���R=[0 80 2]��NE�ļs��ֵ��0��330 MW��PT�ļs��ֵ��0��20 MPa��ȡ�����O��ֵN1=300 MW�������O��ֵP1= 18 MPa;
�ڰٷ�֮70ؓ�ɕr�������������ֲ�׃�^��WNNCPC�������ԣ�P1���O��ֵ�ͼs��ֵҲ���ֲ�׃�����O��ֵȡ��210 MW��ϵ�y����Y������D5��ʾ��
�鷽����^С���W�j�V�x�A�y���ƵĿ���Ч����������ó�ҎPID���Ԍ�ϵ�y�M�п��Ʒ��档�����r̎��********ؓ�ɕr���O��PID�����������M�з��棬��׃��ٷ�֮70ؓ�ɹ��r�r��ʹPID����������ֵ���ֲ�׃�����^��PID���Ƶ������ԣ��˕r푑�������D6��ʾ��
�D5�ķ���Y����������WNNCPC�����\�õ���Ԫ�C�M�f�{����ϵ�y�У�ԓϵ�y�ܱ��C���ʡ���������������ƽ���ظ�ۙ���O��ֵ���Ҍ�����ģ�͵IJ��_���Ծ��кܺõ��m���Ժ������ԡ����ɈD6����Y�����Կ�������ģ�Ͱl����׃�r����ҎPID���Ʋ��ܺܺõ��m��ģ�͵�׃�����ɂ�ݔ�������F���^��ij��{����ͬ�r�{���r�gҲ�^�L������Ѹ�ٸ�ۙ�����O��ֵ��
4�Y�Z
����ᘌ����͆�Ԫ�C�M�f�{�����\�����ձ���ڵĆ��}�������һ�N���͵ąf�{����ϵ�y���OӋ������������С���W�j�c�V�x�A�y������Y�ϵIJ��ԣ�ԓ�㷨����Ч����ɶ�׃���Ǿ���ϵ�y�Ĕ��Wģ�ͱ��R��ͬ�r���M�п����������������������ģ�ͱ��R�^�����ѫ@�õĔ�����ʹ�V�x�A�y�����ھ�Ӌ�����^���ȱ�ݵ��Ը��M������Y��������ԓ�����ܱ��C���ʡ���������������ƽ���ظ�ۙ���O��ֵ��׃���r�r����Ч���Ȃ��yPID���룬�����^�õ������Ժ͌����ԡ�
|