�����pģ�����gʸ���{�Ƶ�ֱ���D�ؿ���
�̱�܊
�����Ϲ��̌WԺ���ü��g�WԺ��������̶411101��
ժ Ҫ�����˸��ƻ��ڿ��gʸ���{�Ƶ�ֱ���D��ϵ�y�ĄӑB���ܼ������ԣ������˂��ySVM-DTC�в��Ãɂ�PI���������a������늉�ʸ��������PI�����������y�Դ_���Ć��}�������һ�N�����pģ�����gʸ���{��( SVM)�Į���늙Cֱ���D�ؿ���(DTC)���ԡ��U���ˮa����机��D����늉�ʸ����ģ���������ľ��w���OӋ�^�̣���ģ����������ݔ��׃���քe���朡��D���`��ʹ�朡��D���`���׃���ʣ�ݔ���酢��늉�ʸ���Ĵ�朡��D�ط�������ԓ���Ʒ����ڻ���Simulink�ķ���ܛ���ͻ���DSP2812�Ŀ���оƬ�Č���b�÷քe�M���˷����c�����c���y��SWl-DTC�M���˱��^������͌��Y���������pģ��SVRl-DTC����ϵ�y�ӑB���ܺã���Ч�����ϵ�y�ĵ������ܡ�
�P�I�~������늙C��ֱ���D�ؿ��ƣ����gʸ���{�ƣ�ģ�����ƣ�������
�ЈD���̖��TP 27 �īI���R�a��A
1�� ��
���y��ֱ���D�ؿ����ǽ����D�ص�Bang-Bang���Ɓ팍�FPWM�Ŀ��Ʋ��ԡ�ͬ�r늴����_�P�l�ʲ��̶��Ć��}�����Ҳ��ɱ���������D�ؼ��������ӻ�p�١����˽�Q�@Щ���}�����ÿ��gʸ���{��(SVM)���g��DTC�㷨�O��pСݔ���D���}�ӣ����_�P�l�ʵõ��̶�������늉�ʸ����ȡ��SVM���P�I���ձ����2��PI���������{�����Ӵ�机��D�أ��ԫ@�Å���늉�ʸ�������H��ԓ�����������_�����_���Ƶ�Ч�������PI������ه�ڴ�机��D�صĜʴ_�^�y���e�ǵ����\�Еr����机��D�صIJ��ʴ_�^�y�O���Ӱ���PI�Ŀ������ܡ�Ŀǰ��ģ��������ֱ���D�ؿ���ϵ�y�ЏV�����ã��@ʾ���������ԏ��ă�Խ�ԡ�
��ˣ��������ϵ�y�������Ժ͵������ܣ����������һ�N�pģ�����gʸ���{�Ƶ�ֱ���D�ؿ��Ʒ�����
2 DTCϵ�y�Ŀ���ԭ���͔��Wģ��
���ÿ��gʸ���Ĕ��W�����������Զ��Ӵň����������oֹ������������ϵ�����ϵĔ��Wģ�����£�
��朷��̣�
ֱ���D�ؿ���ϵ�y�ڵ����\�Еr���ý��ƈA�εĴ��܉�E��ͨ�^�z�y����늉��Ͷ��������������׃�Q���õ�늉������Ȼ����ʽ(1)��ʽ(2)�^�y����ʽ(3)�^�y�D��t���Ķ����F����늙C��ֱ���D�ؿ��ơ�
3�pģ��SVM-DTCϵ�y
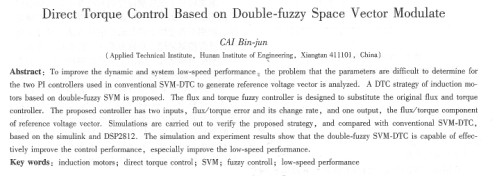
1)���gʸ���{�ƵĻ���ԭ�����gʸ���{�Ƽ��g���������Ļ���늉����gʸ�����Ժϳ������С�ͷ���ą���늉�ʸ������D1��ʾ��
����늉�ʸ���Ʌ���늉�ʸ������λ���ж������gʸ���ϳɵı��_ʽ��
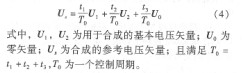
ʽ�У�U1��U2�����ںϳɵĻ���늉�ʸ����u0����ʸ����Us��ϳɵą���늉�ʸ�����ҝM��T0=T1+T2+T3��To��һ���������ڡ�
��ʽ(4)�D�Q���oֹ����ϵ�������S�ϣ�
��1�ͦ�2�քe��늉�ʸ��U1��U2�ca�S������ĊA�ǡ�ʸ�����Õr�g����ʽ(5)��ʽ(6)��ȡ��
�e���f�����Dl��������������늉�ʸ��u4��U6�ϳɅ���늉�ʸ��Us������1=0�Ⱥͦ�2= 60�ȴ���ʽ(6)��ʽ(7)�������늉�ʸ�������Õr�g�քe��
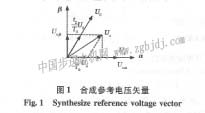
2)�pģ��SVM-DTC���ƌ��F���y��ֱ���D�ؿ��Ʋ��ɱ���ش��ڴ�机��D���`��܉��a����机��D���`���늉�ʸ���Q�酢��늉�ʸ���������Å���늉�ʸ����SVM-DTC�㷨�ĺ����}���pģ��SVM-DTC����ԭ������D2��ʾ��
�Ŀ���ԭ����D�ɿ��������Fϵ�y�������ܵ���Ҫģ�K�Ǵ��ģ�����������D��ģ�����������D���`��^�D��ģ���������õ����D����ϵ�
���늉�ʸ����q�S���������Ӵ���`��^���ģ���������õ����D����ϵ�
���늉�ʸ����d�S�������õ��ą���늉�ʸ���������D����ϵ�µ�2��늉�ʸ����������������SVM֮ǰ���ȷքe�D�Q���oֹ�Ķ��ӡ�������ϵ�£��D�Q�Pϵʽ���£�
�D�Q���ɵ�2�����oֹ����ϵ�µķ�������SVMģ�K֮�����ɿ�����׃���_�P��B��PWM��̖���Ķ����F�����pģ�����gʸ���{�Ƶ�ֱ�ӿ��ơ�
4��机��D��ģ�����������OӋ
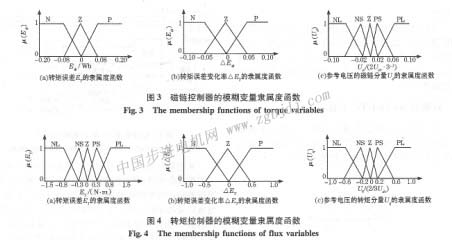
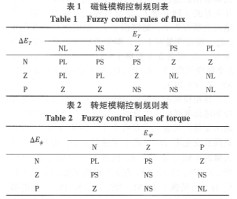
1)׃����ģ�������`�ٶȺ������ģ����������������`���С����׃��������ݔ������늉�ʸ����d�S����u���x��ݔ�롢ݔ��׃������ݔ��׃����2��������`��E�պʹ���`��׃���ʦ�E��,ݔ��׃����1����������늉�ʸ����d�S����얡�E�հ���3��ģ���Ӽ�(Ns��Z��Ps)����E����3��ģ���Ӽ�(N��Z��P)��Ud��5��ģ���Ӽ�(NL��NS��Z��Ps��PL)��
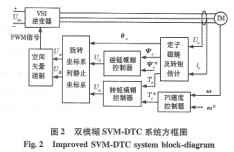
�D��ģ�������������D���`���С����׃��������ݔ������늉�ʸ����q�S����U���x��ݔ�롢ݔ��׃������ݔ��׃����2�����D���`��ET���D���`��׃���ʦ�ET��ݔ��׃����1����������늉�ʸ����q�S����Uq��ET����5��ģ���Ӽ�(NL��NS��Z��ps��PL)����ET��3��ģ���Ӽ�(N��Z��P)��Uq��5��ģ���Ӽ�(NL��NS��Z��Ps��PL)�����ģ����������ģ��׃��E�գ���E�պ�Ud���`�ٶȺ����ֲ�����D3��ʾ��
�D��ģ����������ģ��׃��ET����ET����Uq���`�ٶȺ����ֲ�����D4��ʾ��
2)ģ������Ҏ�t�Ľ�������SVM-DTCϵ�y�Ŀ���ԭ����ֱ���D�ؿ��Ƶ�˼���Ǯ��D�غʹ�朵��`��ֵ�ڜ��h���^���ķ����ȣ���朻��D��ݔ����1��O��ͨ�^��朡��D�صĴ�С�M�п��gʸ�����x�Ķ����F�D�ص�ֱ�ӿ��ơ��箔���ڴ���`�������^��r����朱��^����ݔ����1�����D�ص��`��������^��r���x���늉�ʸ����U1(011)���Ѵ�Ҏ�ɷ�ӳ���D�غʹ�朵ą���늉�ʸ���ϣ������Ю�����`��������^��( PL)������`���׃���ʞ�ؓ���^��(N)�r��ݔ���ą���늉�ʸ����o(z)���������D���`�����(P)���D���`���׃���ʞ���(P)�r��ݔ���ą���늉�ʸ����ؓ��(NL)�������@һ�ձ��׃��Ҏ�ɵó���机��D�ص�ģ������Ҏ�t��Ҋ��l����2��
ԓ����Ҏ�t�m���ڿ��gʸ���{�Ƶ�ֱ���D�ؿ���ϵ�y��
ģ��Ҏ�t����If-Then��ʽ��ʾ����朣��D��ģ����������i�lҎ�t��ʾ��
���У�Ai��Bj��Cij���朣��D���`��E��/ET��朣��D���`��׃���ʦ�E��/��ET���Լ�����늉�ʸ��d/q�S����Ud/Uq���Ӽ�׃�������ģ����������15�lҎ�t���D��ģ������������9�lģ������Ҏ�t��
3)ģ�������c��������朣��D��ģ��������������Mamdaniģ������������i�lģ��Ҏ�t��������ģ���Pϵ���£�
����ģ�������õ��Ŀ�������һ��ģ�����ϣ������،���ֻ�ܽ��ܾ��_�Ŀ���������˱�횽��^������̎������ģ���������������ķ��D�Q�ɾ��_�����F���ơ�
5�pģ��SVM-DTCϵ�y�����c���
1)���漰�Y������ԓ����ϵ�y��Ҫ������̶늙C�S���ƵĵVɽ�Cе׃�l���g��15 kW늙C��ֱ���D�ؿ��Ʒ�������w���о���������Mat��ab/Simulink����ܛ����˻����pģ��SVM-DTC����ϵ�y����ģ�ͣ��������pģ��SVM-DTCϵ�y�Ŀ���ԭ���M����C��
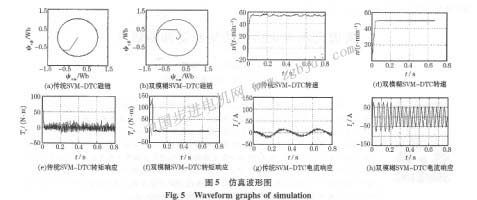
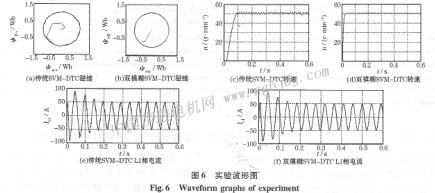
���w����l���O���飺ؓ�d���ӣ��D�ٽo��ֵ��50 r/min��ؓ�d�D�؞�O���pģ��SVM-DTCϵ�y�͂��y��SVM-DTC��ϵ�y�ķ��慢����ͬ������r�g�O��0 8 s������Y������D5��ʾ��
�ɈD5�еķ���Y����֪���pģ��SVM-DTCϵ�y�������ڂ��ySVM-DTCϵ�y�ڵ��ٕr�����Ӵ�朵��������ӽ��A�Σ������]���}�������D��푑�׃�죬���ٕr�ܿ�׃�ú�ƽ��������c�D�ٵ��}�����^���y��SVM-DTCϵ�y���pС���D��푑��ٶȼӿ죬���ܺܿ��_���������o���ӡ�
2�����Y�����������Mһ����C��������Ŀ��Ʒ��������_�ԣ�����TMS320LF2812��� ��оƬ�Ŀ���ƽ�_���M�Ќ����C��������늙C�����c���慢����ͬ�����Y������D6��ʾ��
�D6�Ќ��Y������������Y���c���Y������������Ķ��Mһ����C�˻����pģ��SVM-DTCϵ�y���и��õ��D�����Ժ��D�����ԣ����Ҍ�ϵ�y�Ĵ���`���кܺõ������ԣ��������˿���ϵ�y�ĵ������ܣ��Ķ��C�����²��Ե���Ч�ԡ�
6�Y�Z
���Ļ���ģ��������Փ���һ�N�pģ��SVM-DTC���Ʋ��ԡ����y��SVM-DTCϵ�y����PI�������a������늉�ʸ�������ô�朡��D��ģ������������PI���������Mһ�����SVM-DTCϵ�y���ٕr�Ŀ������ܡ�ͨ�^�c���y��SVM-DTCϵ�y�M���˷��桢����C������͌��Y��������ԓ���Ʒ����܉���pСϵ�y���D�ء��D�ټ���朵��}����������Ч���ϵ�y�Ą��o�B���ܣ������ǿ���ϵ�y�ĵ������ܡ�
|