������ʲ��M늙C�ӿ����·�OӋ
ժҪ����Ƭ�C�Y��늙C���ÿ���оƬL297�M�Ƀ��ಽ�M늙C߉�·�����ƴ���MO SFET�ܽM�ɵ�H�����·��������R2110�ӹ��ʹܵĖŘO�������˹����Ӿ�·�����·��
�F�˴��ʺ����ز��ӣ�ͬ�r���ü��ֿ��Ʒ�ʽ������˿��ƾ��ȣ������ڴ��ʵ��Ԅӻ��O���С�
�P�I�~�����M늙C�����ֿ��ƣ�L297��R2110
0�� ��
���M늙C����һ�N�߾��ȵĈ���Ԫ�����V�������ڸ��N�Ԅӻ�����ϵ�y�С��S���F�����g�İlչ�����M늙C���c�����·�ɷ���Ԫ�����ü����·�lչ�������o���M늙C���Ǝ���O�㣬�����w�e�sС���ɱ����ͣ����ܸ��ƣ��{�����㣬��������ϵ�y�Ŀɿ��ԺͿ��ɔ_�ԡ��Á����Ʋ��M늙C����ӿ���ϵ�y������ǰ�������ʿ����·�����Դ��ĩ���Ĺ����Ӳ��֡�ǰ�������·�����F���ɣ�ͨ����ģ�M���ֻ�ϼ����·������С����ϵ�y��ĩ�����·Ҳ�Ѽ��ɻ��������ڴ���ϵ�y��ĩ�������Ӽ���оƬ��Ҋ�҃r���^�ߡ����IJ���L297������P,21 10�ʹ��ʈ�Ч���ܽM�ɵĹ������·�����Y�φ�Ƭ�C�M�м��ֿ��ƣ������˲��M늙C���\��Ʒ�|��
1����ԭ��
��������Ҫ�����@�M����Ĵ�С���І�늉���������Ӻ͔ز������ӃɷN��ʽ���ز�
�����Ӿ��и��l푑��á�ݔ���D�ؾ�������������F��ȃ��c�������x�ô˷�ʽ���ڔز��������·�У��@�M����Ĵ�Сȡ�Q�ڱ��^���Ľo��늉������H�nj�����������_�A�o���^��ʩ�ӽo�����ƽ�����M늙C������ԭ����D1��ʾ��
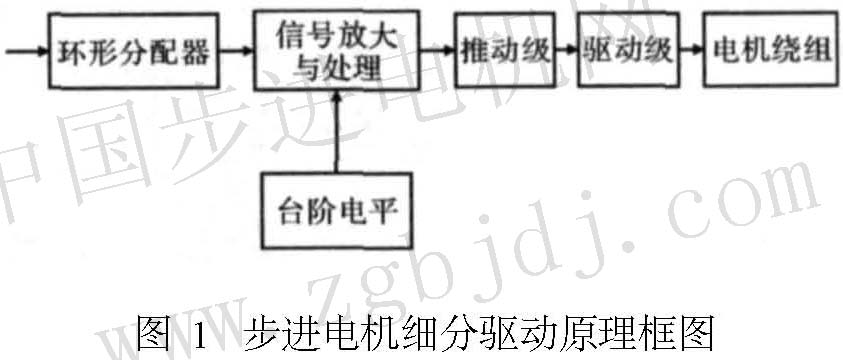
�h�η������Á����܁�����Ϣ̎���c���Ɔ�Ԫ��cP�}�_���������M늙C��B�D�Q��Ҫ��Ġ�B���a��������ͨ���ֹ����̖��ÿ��һ���}�_���h�η�������ݔ�����D�Qһ�Ρ��ĭh�η�����ݔ���ĸ�����ͨ���ֹ����̖������̖�Ŵ��̎�������Y�Ͻo�����_�A�ƽ��ݔ����Ч�Ŀ�����̖�����ƄӼ����@���gһ�����Ҫ늉��Ŵ�Ҳ��Ҫ����Ŵ���̖̎�팍�F��̖���D�Q�ͺϳɹ��ܣ��a���ز������Ƶ�����ܵ���̖�������a������ܵ��ӡ��ƄӼ�����̖�Mһ���Ŵ������Ӽ����Еr��߀�����ƽ�D�Q�����á�
2Ӳ���·
�����OӋ�ă��ಽ�M늙C��Ӳ���·��D
��D2��ʾ��
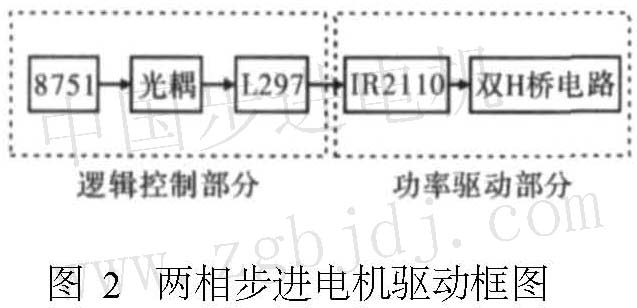
�D2���ಽ�M늙C�ӿ�D
2��1߉�����·
����L297���Ժܷ���،����M늙C�M�п��ơ�
L297�m�����p�O�������ಽ�M늙C���߆ΘO�����ಽ�M늙C�Ŀ��ơ�����ݔ����̖�ӹ����·��������ֻ��Ҫ�r犡������ģʽݔ����̖����λ�ɃȲ��a�����ɜp�p̎������ؓ���ͳ����OӋ����
L297�ĺ��IJ�����һ�M�g�a�������ܮa�����N����������з���(c����cc��)��HALF��FULL
���r�cPݔ�룬���g�a����һ�A�����M����һ�A�ݡ��g�a����4��ݔ���c�B�ӵ�ݔ��߉���֣��ṩ���ƺ͔ز��������������L297��һ����Ҫ�M���ǃɂ��������@�M�����FWM�ز������ԫ@�����õľ��l���ԡ�ÿ���ز�����һ�����^����һ��Rs�|�l������Ӳɘ����M�ɣ����O��һ��������ʎ������ɂ��ز����ṩ�|�l�}�_��̖����
�r���ʎ���}�_ʹ�|�l����l��늙C�@�M������������ɘ����ߡ���늉�����������늉����⣬���^�����D��ʹ�|�l����λ�����ʾ��w���P�࣬����½����ȴ���һ����ʎ�}�_�ĵ������@�ӣ��|�l��ݔ�����Ǻ��l1WM��̖���{��L297��ݔ����̖���@�M�������ֵ��f�����_����f��������Mcu�l���������DAc�D�Q�õ����Ķ�����ث@���A��늉����a���A�����������L297Ҳ��늄әC�D����D���M�п��ơ�
���ڲ��M늙C���D���^�ߡ�׃���^��Ĉ�������ʧ������D�ĬF���ڵ��ٕr��������ʎ���������˸������\��Ʒ�|�����ü��ֿ��Ʒ��������Mԭ�����ǰ�һ�������������@�Mͨ����}�_���Ԯa�����D���؎����D�����D�������Ӿ��Ǯ������ă��������@�Mͬ�rͨ늕r����ԭ��һ�ε�λ�ĸ�����������������g��B���ֳ��A�ݣ����xɢ׃���Ĕ������B�m���ġ������Æ�Ƭ�C�̓�ƬL297���ɽM�ɼ����·�����·�OӋ�в��Æ�Ƭ�C�a���cL297����һ�µļ��օ���늉�p 0����P0��ݔ�������Ĕ��Mֵ��DA(20832�Ĕ�ģ�D�Q���ͽoL297���D�Q�·��D3��ʾ�������p���_��ʽ�ӿڣ�ͬ��ݔ���ɽMֵ���քe�ͽo��ƬL297��k�����_��
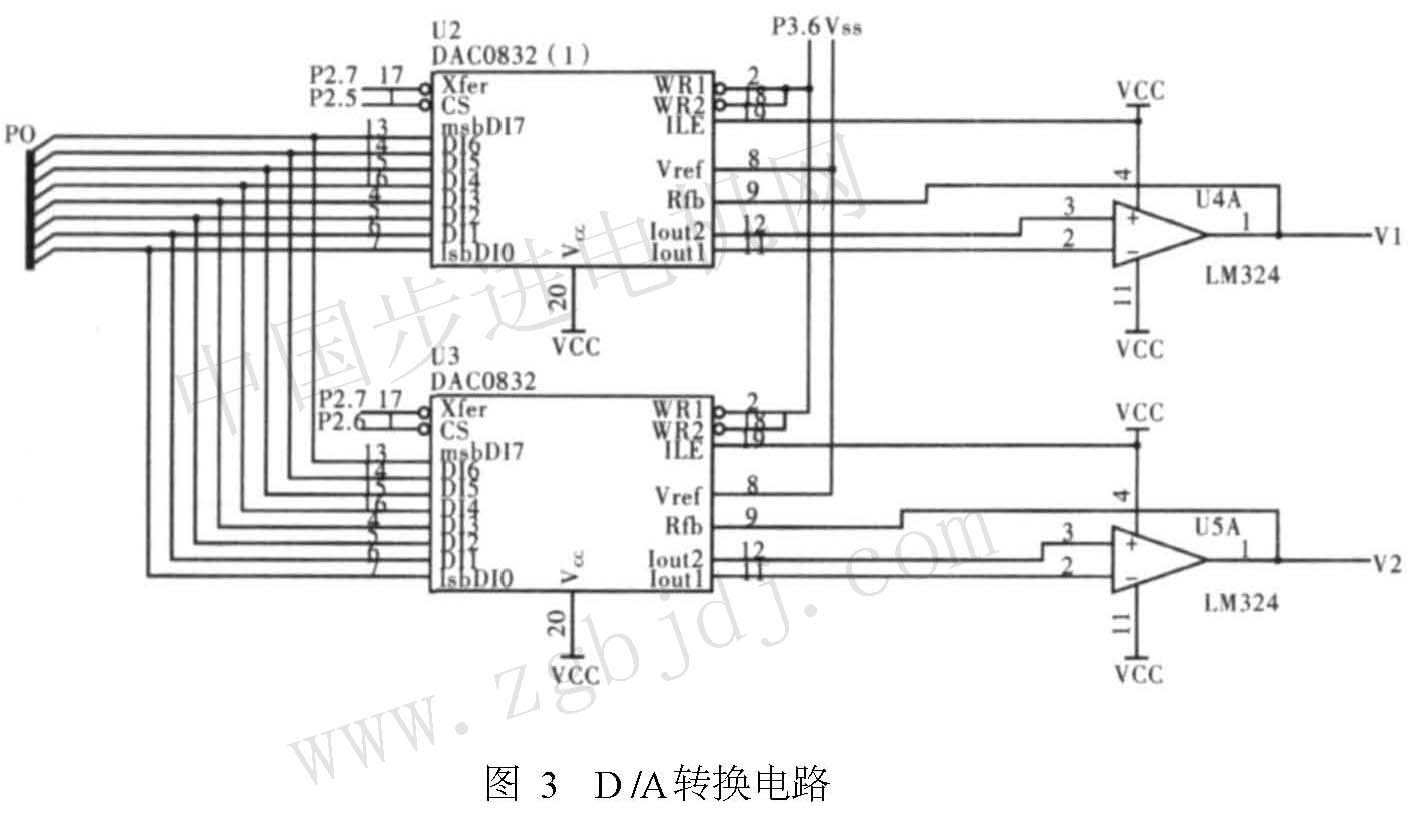
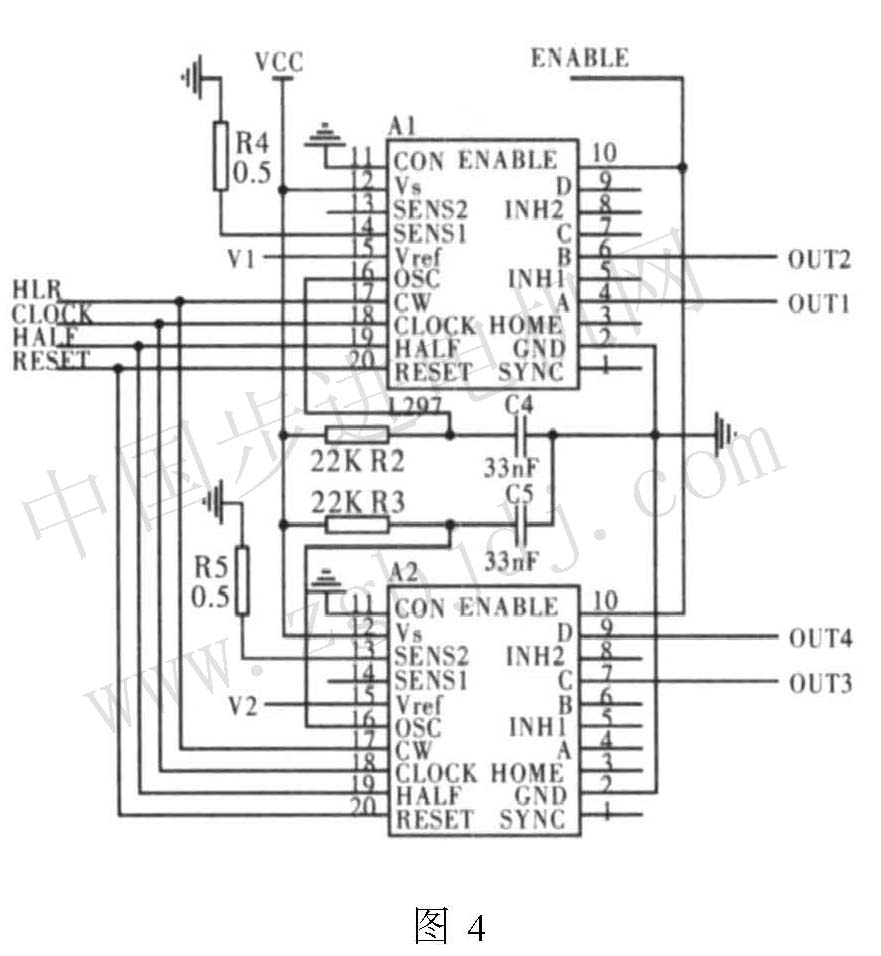
�Ƀ�ƬL297�քe�a�����ֿ��ƃɂ���·��Ҫ��߉��̖����D4��ʾ�����г�4�ͳ�5�քe�ǃɂ���·�ęz�y��衣vl��v2�ǽ�DA�D�Q�õ���������_�A�ƽ��
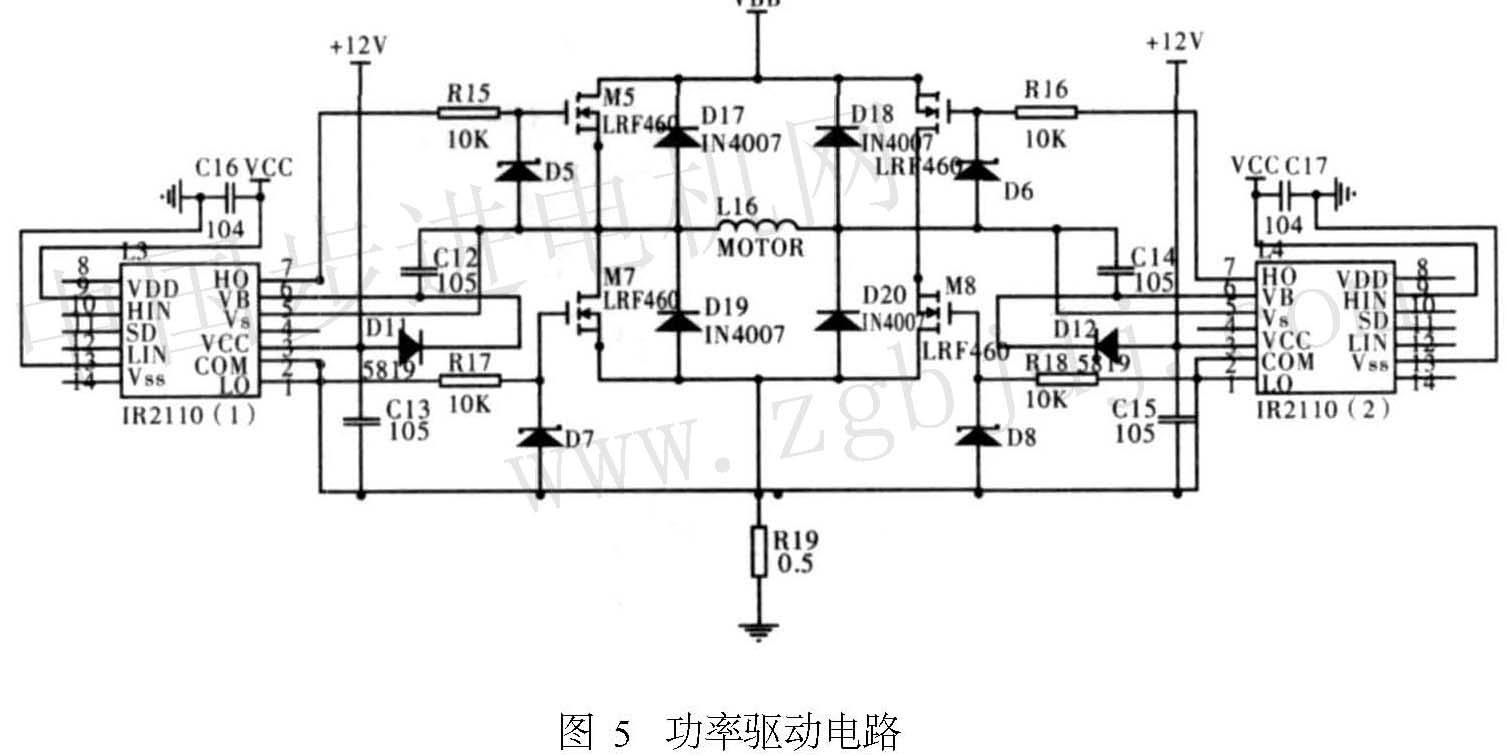
2��2�������·
���ڃ��ಽ�M늙C�p�O����Ч�ʱȆΘO����Ҫ�ߣ��ʲ����pH���ӽY�����_�P���x�ù���MOsFET(RF450)���������c���_�P�l�ʸߣ�****���_�װ�ǧ�ա���ֵ늉��_��500 v����ֵ����_��14 A����ȫ�M����ʲ��M늙C������RF450�����·����R2110�ŘO������ԓоƬ��һ�N�pͨ�����ŘO�ӡ��߉����ٹ��������Ć�Ƭʽ������ģ�K����оƬ�в����˸߶ȼ��ɵ��ƽ�D�Q���g�������߉�·�����������Ŀ���Ҫ��ͬ�r��������·�Ŀɿ��ԡ��������Ϲܲ����ⲿ���e�����늣�ʹ�����Դ
��Ŀ�^�������Ӵ��p�١�
IR2110����Ҫ�����пڡ����Ȳ��������e���gδ���Fͬһ�����·����ͬ�rݔ���ɂ�����׃���и߉��Ⱥ͵͉��ȵ�ͨ����̖�����ăȲ�����
�e�����OӋ�ˑҸ��Դ���Ҹ��Դ���C��ֱ�ӿ�����ĸ��늉��飮4 v��500 v��ϵ�y��δ�ӹ��ʡ�MOSFET��I(BT��ͬ�r�����������S����̖��늉��������_��50 p s��+50 v��s���ʱ��C��оƬ���������ι��ܣ����F�˲�Փ��ݔ����̖ǰ�صĶ�����Σ����ɱ��C�ӵ�����MOsFET��113��BT�ŘO�ϵ�����̖ǰ���غܶ����@�ӿɘO���
�p�ٱ��ӹ����������_�P�r�g�������_�P�p�ġ������Ĺ��ĺ�С���ɘO��p�ّ���������MO s�����r�ŘO���·���Դ�������Ķ��pС�ŘO���·���w�e�ͳߴ硣R2110�ĺ����OӋ��ʹ��ݔ�뼉�Դ�cݔ�����Դ�ɑ��ò�ͬ��늉�ֵ���@�Ӿͱ��C����ݔ���c(MOs��T���ƽ���ݣ���ݔ�������^������늉����������������Ɍ�ݔ��ăɂ�ͨ����̖֮�g�a�����m���ӕr�����C�˼ӵ����ӵ���׃����ͬ����ϵăɂ���������������̖֮�g��һ���i�r�g�g���������ֹ�˱��ӵ���׃���Ѓɂ���������ͬ�r��ͨ���l��ֱ���Դֱͨ����·��Σ�U�� �������·��D5��ʾ���ŘO�Ӳ�����(112�����e���vCc��Dll��(112�Լ��¶˵��_�P�ܽo(112��늣��Դ_���¹��P�]���Ϲ܌�ͨ�r���ϹܵĖŘO��(112�����ă���δ�ӡ���IR2110�ςȺ��ȵ�ݔ���˷քe��һ����裬�_�����¹ܲ���ֱͨ�������ڹ��ʹܵĖŘO�ӷ������O�����鱣�o������߉��p�Ĺ��ʹܡ��҂ȽY���c��Ȍ��Q�������·���Ãɂ�������H��Y����ÿ������4�����ʹܽM�ɡ�ÿ�����ʹ��϶�����һֻ���O�������m��ʹ�á����Ϲܺ����¹܌�ͨ�r����������Ϲܣ�늙C�@�M�����¹ܵ��أ����Ϲܺ����¹܌�ͨ�r����������Ϲܣ�늙C�@�M�����¹ܵ��أ�늙C�@�M�����^�����෴�������
3ܛ���M��
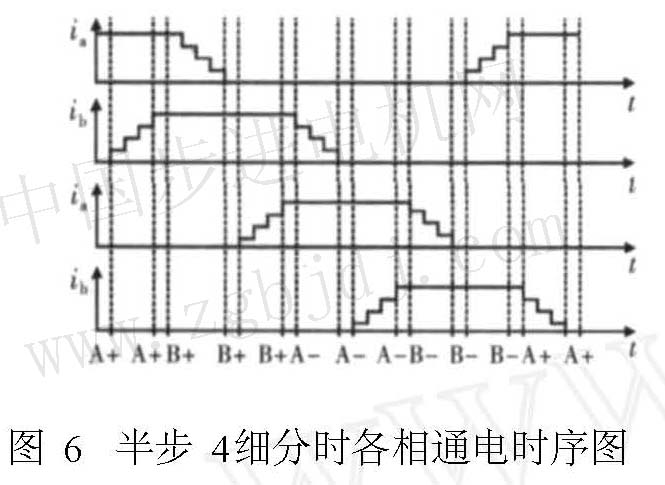
���ಽ�M늙C�����Ŀ��Ʒ�ʽ�����N�� ���У�+A+B�ͣ�A��B�քe����A���B���� ������ ��ͨ늺ͷ���ͨ늡�����������ʽ�Ͱ벽������������Ń��ģ�+A +B ��A ��B�� ʽ��������L297����Č��F�����벽������B���p����Ń��ģ� +A+B +B��A ��A��B �����С���������ڼ��ֿ��ơ��벽������ʽB+A�� ������4���֕r����ͨ늕r��D��D6��
 ����ʹ����L297�팍�F������䣬ʹܛ���Ĺ��������p�٣����������ϵ�y�Ŀɿ��ԡ��ɴ˸����r��D�Ϳ��Ժ����ؾ��������M늙C�Ŀ��Ƴ��̻��چ�Ƭ�C�����Д�������{�á�ϵ�y�����D��D7��ʾ�� ����ʹ����L297�팍�F������䣬ʹܛ���Ĺ��������p�٣����������ϵ�y�Ŀɿ��ԡ��ɴ˸����r��D�Ϳ��Ժ����ؾ��������M늙C�Ŀ��Ƴ��̻��چ�Ƭ�C�����Д�������{�á�ϵ�y�����D��D7��ʾ��
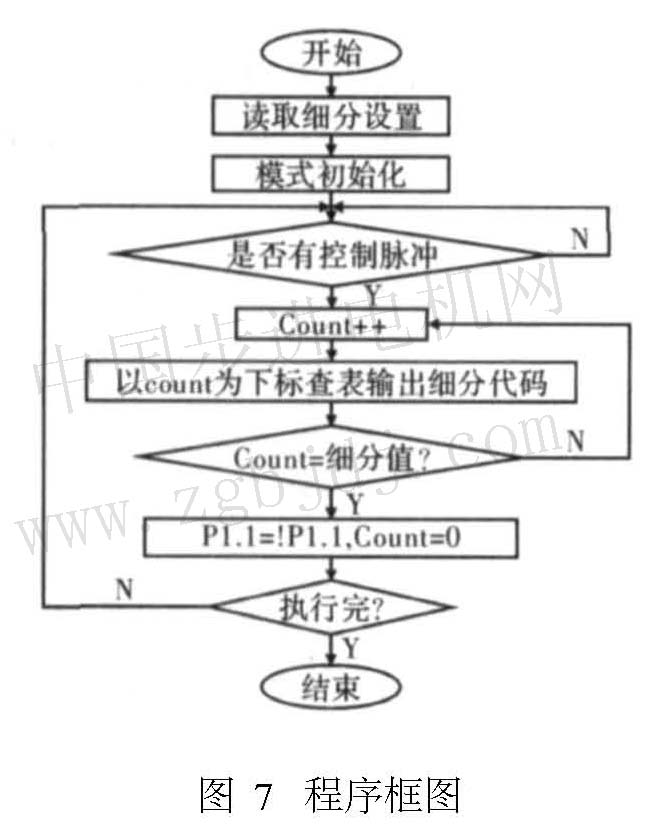
��P1��1����L297��OcK��ݔ�룬P1��0��P1��3�քe��C����HALF���_��ݔ�룬��ģʽ��ʼ�����x���M늙C�Ĺ�����ʽ���D���ⲿ�}�_�Ć�Ƭ�C���ⲿ�Д�����룬���Д�������M��Ӌ���������ݔ����Ч�������@��ʹ�ò��M늙C�ӿ����·�܉���õ��c������;�ӿڣ�������M���{�ٿ��ơ�
4�YՓ
�Ɇ�Ƭ�C��L297�M��߉�����·��ֻ��Ҫ
�^�ٵ�ݔ����̖����λ��L297�Ȳ��a�����p�p��Ƭ�C�ͳ����OӋ��ؓ�����Ã�ƬL297�քe���ƃ��ಽ�M늙C�ăɂ��@�M���Ɇ�Ƭ�Cݔ����������õ��Ĕ�������D��A�D�Q�͵�L297���F�˼��ֿ��ƣ��܉F256���֣���Ч�ظ����˲��M늙C���\��Ʒ�|�������ڑ����и������H��r�x�֔�������R2110�ʹ���MOsFET�ܽM�ɵĹ����·�����Ӵ�늉���������IJ��M늙C�����п��������ı��o���ܣ��O��ؿsС��ӡ���·��ߴ硣ԓϵ�y���οɿ����܉����ڴ����Ԅӻ��O���С�
�����īI
[1]���ܿ��������֣��nӢ�ң����ǻۃ�����ʽ���M늙C�����ă����OӋ늚���ӣ�2002 (2)��59_64
[2]�O�d�M���V�棬���Բ��M늄әC��****���ֿ����Ԅӻ��c�x���x����2001��(1)��33_36
[3]���i�w���Ȳ�����L297��L298���ʽ���M늙C���������ƹ����I������W�W��2003��(8)��40һ43
��4������ R2110�����Ӽ���оƬ���� ��ӹ��̎�I Jll2004�� 10��33_35
[5]�����༚�փ�����ʽ���M늙C����������[D]�������I��W��2007
|











