���M늙C�ڵ��l�����r��������Ӵ������ȱ�c�����ʹ�ü��ַ�ʽ�����ܺܺõĽ�Q�@�����}�����M늙C�ļ��ֿ��ƣ��ı��|���v��ͨ�^�����M늙C����@�M������Ŀ��ƣ�ʹ���M늙C�Ȳ��ĺϳɴň������ĈA�����D�ň����Ķ����F���M늙C����ǵļ��֡�һ����r�£��ϳɴň�ʸ���ķ�ֵ�Q���˲��M늙C���D���صĴ�С�������ɺϳɴň�ʸ��֮�g�ĊA�Ǵ�С�Q���˲���ǵĴ�С�����M늙C�벽������ʽ���N���˼��ֵĹ���ԭ����
���F���ַ�ʽ�ж�N��������õ����}���{��ʽ�ز��ӷ�ʽ����������õIJ��M늙C��оƬ�������@�N�ӷ�ʽ��TA8435��������һ�NоƬ����
1����TA8435HоƬ�IJ��M늙C���ַ�ʽ
1.1 TA8435оƬ���c
TA8435�ǖ|֥��˾���a�Ć�Ƭ���Ҽ��ֶ��ಽ�M늙C�ӌ���оƬ��ԓоƬ�����������c��
�ٹ���늉���������10��40 v����
��ݔ��������_1��5 A��ƽ������2��5 A����ֵ������
�۾����������벽��1��4���֡�1��8�����\�з�ʽ�ɹ��x��
�ܲ����}���{��ʽ�ز��ӷ�ʽ��
�ݾ����������D���ƹ��ܣ�
�ގ��Џ�λ��ʹ�����_��
�߿��x��ʹ�ÆΕr�ݔ����p�r�ݔ�롣
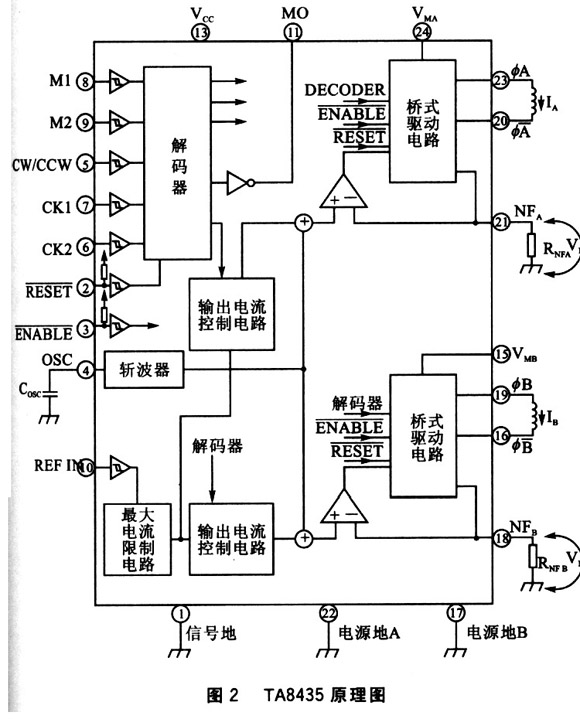
�ĈD2�п��Կ�����TA8435��Ҫ��1����a����2����ʽ���·��2��ݔ����������·��2��****��������·��1���ز����ȹ���ģ�K�M�ɡ�
1.2 TA8435���ֹ���ԭ��
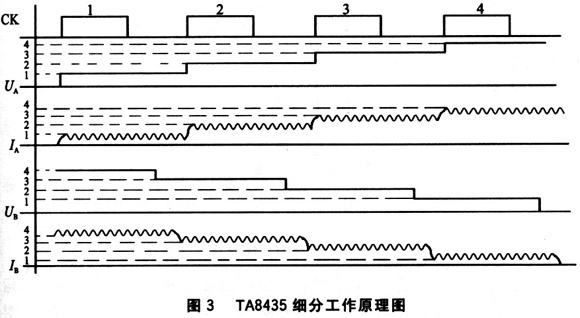
�ڈD3�У���һ��CK�r����ڕr����a�����_��ʽ���·�������VMA����늙C�ľ�Ȧ��RNFA���c�ؘ��ɻ�·�����ھ�Ȧ늸е����ã��������u����ģ�����RNFB�ϵ�늉�Ҳ�S֮��������RNFB�ϵ�늉����ڱ��^�����˵�늉��r�����^��ʹ��ʽ���·�P�]��늙C��Ȧ�ϵ�����_ʼ˥�p��RNFB�ϵ�늉�Ҳ�����pС����늉�ֵС�ڱ��^������늉��r����ʽ���·������ͨ�����ѭ�h�����������������½��γ���X�����䲨����D3��IA���εĵ�1�Ρ��������ڔز����l�ʺܸߣ�һ���ڎ�ʮkHz�����l�ʴ�С�c���x��������P����OSC�����£������X���y�Ƿdz�С�ģ����Խ����J��ݔ�������ֱ�����ڵ�2���r������_ʼ�r��ݔ����������·ݔ��늉�Ua�_����2�A�Σ����^������늉�Ҳ�������2�A�ε�늉�����ˣ��������M늙C��Ȧ������ĵ�l�A��Ҳ�����ڶ��A��2�����������DIA��2���֡���3�r����ڣ���4�r�����TA8435�Ĺ���ԭ���c��1��2��һ�ӵģ�ֻ�������߱��^������늉����ѣ�ݔ�����������DIA�е�3��4���֡������K�γ��A����������ھ�ȦB�ϵ��������D3��IB����CKһ���r����ڃȣ�������ȦA�;�ȦB�������ͬ�����£����M늙C�\�Dһ�����ֲ���
1.3���M늙C�đ���
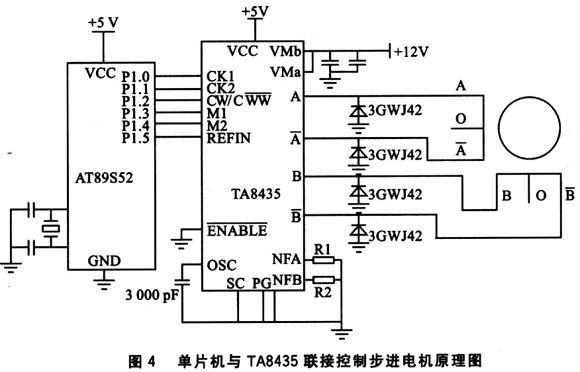
�D4�dž�Ƭ�C�cTA8435���B���Ʋ��M늙C��ԭ��D�����_M1��M2�Q��늙C���D�ӷ�ʽ��MI=0��M2=O��늙C��������ʽ�\�D��Ml=1��M2=0��늙C���벽��ʽ�\�D��M1=O��M2=1��늙C��1��4���ַ�ʽ�\�D��Ml=1��M2=1��늙C��l��8�����ַ�ʽ�\�D��CW��CWW����늙C�D�ӷ���CKl��CK2�r�ݔ���****�l�ʲ��ܳ��^5 kHz�����ƕr犵��l�ʣ����ɿ���늙C�D�����ʡ�REFIN����ƽ�r��NFA��NFB��ݔ��늉���0��8 V��REFIN����ƽ�r��NFA��NFBݔ��늉���0��5 V���@2�����_���Ʋ��M늙Cݔ������������С�cNF���������Pϵʽ�飺��Io=Vref��Rnf���D4�У��OREFIN=l���x�ò��M늙C�~�������0��4 A��Rl��R2�x��1��6 ����2W�Ĵ�����裬O��C�ɾ����ӡ����M늙C�������p�O��ʹ�ã����ఴ����ʹ�Õr������߲��M늙C��ݔ���D�ء�D1��D4��֏Ͷ��O���Á�й���@�M�����
2 �YՓ
���Ľ�B�˲��M늙C�����c��TA8435оƬ����ԭ����ʹ�ü��ַ�ʽ������߲��M늙C�Ŀ��ƾ��ȣ����Ͳ��M늙C����Ӻ�������ˣ��ڵ��l�����r�������x��1��4���ֻ�1��8����ģʽ���Խ���ϵ�y����Ӻ�������ϵ�y��Ҫ�ڸ��ٹ����r������ģʽ���п����_����Ҫ����ٶȣ��@�r�����x��������벽��ʽ�����ٶ��^�ߕr����������벽����ģʽ�£����M늙C�\�з��������С����ҲС��TA8435�ڼ��֡��벽�������N����ģʽ֮�g���ГQ���ஔ���ġ�ʹ��TA8435���Ʋ��M늙C���Ѓr��͡����ƺ��Ρ������ɿ������c�����Ծ��кܸߵ��ƏV�rֵ�͏V韵đ���ǰ����
Tb6560ahq���M��оƬ��ta8435�������汾��
|