����ģ�ͅ������m���Į���늄әC�o�ٶȂ�����DTC
������
(��������WԺ���������471023)
ժҪ��������߶��Ӵ�朵��^�y���ȣ����]�h����^�y������ֱ���D�ؿ���ϵ�y��ȡ�����y�ļ��e�������ڴ���]�h�^�y���Ļ��A�ϣ�����ģ�ͅ������m����Փ(MRAs)��������ٶ����m���^�y��������͌��Y��������ԓ�����ɹ��،��F���D�ٵı��R���C���˷����Ŀ����ԡ�
�P�I�~��ģ�ͅ������m����ֱ���D�ؿ��ƣ�����^�y�����ٶ����m���^�y��
��Ȧ���̖��TM343 �īI���R�a��A ���¾�̖��1004��7018f2010)osһ0063��04
0����
ֱ���D�ؿ��Ƽ��g���^ʸ�����Ƽ��g֮��lչ������һ�N����늄әC׃�l�{�ټ��g��ֱ���D�ؿ���ϵ�y���������y����ߵ���Ҫԭ���ǵ��ٕr���Ӵ���y�Ԝʴ_�^�y�����y�ķ����Dz��ü��e����(U-Iģ��)�������^�y�������e�������������`��e���Լ�ֱ��ƫ�Ɔ��}�������Ǯ���늄әC�\���ڵ��ٕr�@Щ���}׃�÷dz����أ�ʹ�ö��Ӵ���ڵ��D���µ��^�y׃�ò��ʴ_���Ķ�ʹֱ���D�ؿ�ϵ�y�ڵ��D���µĿ��������ܵ�Ӱ푡����˝M������ܽ������ӵ���Ҫ�����ٶ��M���]�h���ƣ����ٶȂ������İ��b������ϵ�y�ď��s�ԣ�������ϵ�y��
�ɿ��Ժ������ԣ�������Tϵ�y�ɱ��;S�oҪ���������]�h����^�y��ȡ�����y�ļ��e�������^�y���Ӵ�朣�ģ�ͅ������m����Փ(MRAS)��������ٶ����m���^�y�����F���ٶȵĹ�Ӌ�����ԓ�o�ٶȂ���������늄әCDTCϵ�y�M�з���͌�����͌��Y���C����ԓ���������_�ԡ�
1ֱ���D�ؿ��ƵĹ���ԭ��
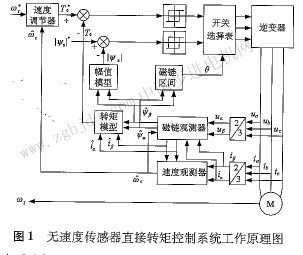
�D1�ǟo�ٶȂ�����ֱ���D�ؿ���ϵ�y�Ĺ���ԭ��D���������࣯����(3s��2s)����׃�Q�ѱ��y��
����늉�ua��ub��uc���������ia��ib��ic׃�Q���ڦ���������ϵ�µ�늉�u����u�º����i����i�£�ͨ�^����^i�Ԝy���õ����������¡��ɦ��������¡�i����i���γ��D��ģݔ�������D��Te���ɶ��Ӵ�朦����������γɴ�朷�ֵģ��ݔ�����Ӵ�朷�ֵ|��s|�����Ùz�y����늙C�D���c�o���D��ͨ�^�D���{����ݔ���o���D���ɣ����ڦ���������ϵ�µĴ�朷���ͶӰ�����ඨ���S���ϣ��õ���朅^�g�R�e���Д�����Ӵ�����ڵą^�g�ȡ�Ȼ�����÷����D��Te�c�o���D��Te���^�γ��D���_�P��̖���c��ͬ�r�����÷�����朷�ֵ|��s|�c�o����ֵ|��s|���^�γɴ���_�P��̖����������朅^�g���D���_�P��̖�ʹ���_�P��̖��K�Q��늉����gʸ�����x���Ԍ��F��늙C��ֱ���D�ؿ��ơ�
2�����ܶ��Ӵ���^�y��һȫ�A����^�y��
2��1����늄әC�ڃ����oֹ����ϵ�µĄӑB���Wģ��
�Զ����D�Ӵ�朞��B׃���Į���늄әC���Wģ������[4]:
2.2ȫ�A����]�h�^�y���ĄӑB���Wģ��
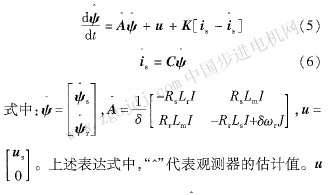
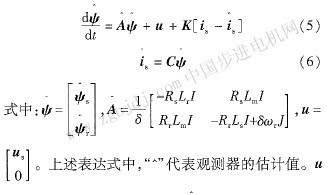
ͨ�^ʽ(1)��ʽ(2)�������Į���늄әC�����ʽ늙C���Wģ�ͣ����Ԙ����ͬ�r�^�y���Ӵ�机Ͷ��������ȫ�A��朠�B�^�y������ʽ����[4]��
�Ǡ�B�^�y����ݔ�룬ݔ����is��K���^�y�������ꇡ��^�y�������һ��ǰ����^�yݔ��is�c늙C�挍ݔ��is������헡���������K�ә��ꇵ����ã����������^�y���õĶ����D�Ӵ�朠�B׃�������^�y��ģ��ʹ�õľ��A�͌��Hϵ�y�ľ��A֮�g���ڲ�r����Ȼ�������^�y��ݔ��is�c���Hݔ��is֮�g����ƫ��ڴ���r�£�ԓ���ӵ�|��s|�c�o����ֵ|��s|���^�γɴ���_�P��̖����������朅^�g���D���_�P��̖�ʹ���_�P��̖��K�Q��늉����gʸ�����x���Ԍ��F��늙C��ֱ���D�ؿ��ơ�
2�����ܶ��Ӵ���^�y��һȫ�A����^�y��
2��1����늄әC�ڃ����oֹ����ϵ�µĄӑB���Wģ��
�Զ����D�Ӵ�朞��B׃���Į���늄әC���Wģ������[4]:
2.2ȫ�A����]�h�^�y���ĄӑB���Wģ��
ͨ�^ʽ(1)��ʽ(2)�������Į���늄әC�����ʽ늙C���Wģ�ͣ����Ԙ����ͬ�r�^�y���Ӵ�机Ͷ��������ȫ�A��朠�B�^�y������ʽ����[4]��
�Ǡ�B�^�y����ݔ�룬ݔ����is��K���^�y�������ꇡ��^�y�������һ��ǰ����^�yݔ��is�c늙C�挍ݔ��is������헡���������K�ә��ꇵ����ã����������^�y���õĶ����D�Ӵ�朠�B׃�������^�y��ģ��ʹ�õľ��A�͌��Hϵ�y�ľ��A֮�g���ڲ�r����Ȼ�������^�y��ݔ��is�c���Hݔ��is֮�g����ƫ��ڴ���r�£�ԓ���ӵ�Ҳ���Կ������������ˣ���������������Փ�ƌ����D��m�����������m���Ք��ʣ���ʹϵ�y���ַ�����B��
���]�����R�D���c���H�D��֮�g���ڵ�ƫ�����ô�����Ӵ�朵Ĺ���ֵ�c���Hֵ֮�g���`�����ͨ�^ʽ(1)�pȥʽ(5)Ӌ��õ�������
��ʽ��ϵ�y�ɾ��Զ�����ǰ��ͨ���ͷǾ��Եķ���ͨ����ͬ���ɣ���(e)���D�٦�r�����m�����R�ʡ��`��ϵ�y�u�M�����ėl���ǣ�ϵ�y��ǰ��ͨ���LJ��������ģ����ҷǾ��Է���ͨ����ݔ���ݔ���M�㲨�����ėl��������
��ô�քe��Ҳ���Կ������������ˣ���������������Փ�ƌ����D��m�����������m���Ք��ʣ���ʹϵ�y���ַ�����B��
���]�����R�D���c���H�D��֮�g���ڵ�ƫ���ô�����Ӵ�朵Ĺ���ֵ�c���Hֵ֮�g���`�����ͨ�^ʽ(1)�pȥʽ(5)Ӌ��õ�������
��ʽ��ϵ�y�ɾ��Զ�����ǰ��ͨ���ͷǾ��Եķ���ͨ����ͬ���ɣ���(e)���D�٦�r�����m�����R�ʡ��`��ϵ�y�u�M�����ėl���ǣ�ϵ�y��ǰ��ͨ���LJ��������ģ����ҷǾ��Է���ͨ����ݔ���ݔ���M�㲨�����ėl��������
�������Mһ���C����
���ڷǾ��Է���ͨ���������C��ǰ��ͨ�����[sI(A-KC]���LJ��������ģ��@�ﲻ��ʽ(12)�����Mһ���ƌ����£�
�ٶ�  ��ô�քe�� �D5��n=150 r��min�r���Ӵ�朵ķ���A��܉�E�͌��A��܉�E���D6��n=150 r��min�r���R�D�ٺ�늙C�D�ٵķ��沨�κ͌��Ρ��ĈD5�͈D6���Կ��������Ӵ��܉�E�ƽ��A�δ�朣������c���Y��һ�£����R�D���ڵ��ٕr���Կ��ٶ��ʴ_���Ք����挍�D�٣������c���Y��һ�¡��� 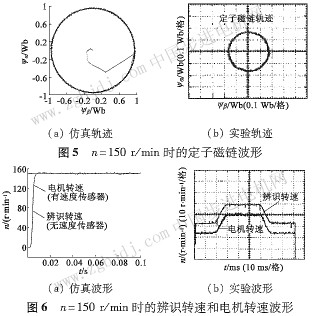 �]�h�^�y���ڵ��ٕr�����Ӵ�朱����^�ߵ��^�y���ȣ��ٶ����m���^�y�����Գɹ��،��F���D�ٵı��R������ԓ�ٶȱ��R�㷨����ʹֱ���D�ؿ���ϵ�y�@�����õĵ������ܡ� |