���ʽ���M늄әC����Փ�������OӋ���c
������(����늙C�о���)
��ժ Ҫ�������Ԍ��ȷ�ʽ�����˻��ʽ ���M늙C�c����ʽ������ʽ���M늄әC�IJ����Փ�����ʽ���M늄әC����Փ���A�ϣ���������϶�ň������S���϶�ň����OӋԭ�t���������ʽ���M늄әC�Č����o�B�D��Ӌ��ʽ������������ʽ���M늄әC�������o��****�D���F���L���o�D�ص��OӋֵ��ԇ�ֵ�� �����}�~�����ʽ���M늄әC����Փ���������OӋ���D�ӣ��F�ģ��L�ȣ��o�D��Ӌ��ʽ
1 �� ��
���M늄әC�ǽ��������_�l�����ձ鑪�õ�����늄әC���Ĺ����υ^�֣��з���ʽ��
�M늄әC������ʽ���M늄әC�ͻ��ʽ���M늄әC���@����M늄әC�aƷ�lչ�v���Ƿ���ʽ������ʽ���ȣ����ʽ�ں��ڷ���ʽ������ʽ���M늄әC���ĬF��Փ����������������Փ���AՓ���������OӋӋ���cԇ���Ǻ�һ�£����a�����ѻ������͡����ʽ���M늄әC�lչ�����t�����@�c���Ų��ϰlչϢϢ���P������������N�߳C�B��ϡ�����wӿ�F�����M�˻��ʽ���M늄әC�İlչ�����ĽY�����a���H�������ʽ���M늄әC�c����ʽ������ʽ���M늄әC�ڻ��������M�б��^�f���Ļ��A�ϣ�Ԕ��Փ�����ʽ���M늄әC����Փ���A��������������OӋԭ�t���OӋ���c��
2��Փ����
����ʽ���M늄әC�Ĺ������A�ǻ��ڶ��Ӵň��a���ķ����D�أ��o�D�غ������_ʽ��
ʽ��MRһ��������ʽ���M늄әC���o�D��
c1-������������
lһ�����F�įB���L
G9������϶�����ȴŌ�����ֵ���X�ӳߴ�_��
F9�������Ӵň��ښ�϶�еĴʼn���
ʽ(1)��ʾ����ʽ���M늄әC�ǻ��ڷ�������(��������)�����ģ���˚�϶�ɂȵĶ����D�ӱ��������OӋ���X�۽Y����ʹ��׃����****����ʽ(1)�ɵó��������D���X�ӳߴ�_��֮��l����ʽ���M늄әC���o�D�������ڶ��Ӵň��ښ�϶�еĴʼn�����늙C�F���L�ȵij˷e��
����ʽ���M늄әC�Ĺ���ԭ���ǻ��ڶ��Ӵň����D�����Ŵň��Ļ������ã��o�D�صĺ������_ʽ��
ʽ�� Mp��������ʽ���M늄әC���o�D��
Fo��������ÿ�O�ń�G2---��������
��f������䓮a����ÿ�O��Ч��
P-һ�D�ӘO����
Bf������䓮a����ÿ�O��Ч����
l���������F�įB���L
��ʽ(2)��Ҋ������ʽ���M늄әC���o�D�����ɶ���늘дň����D�����Ŵň��������îa����ͬ���D�ء�����䓲��|�͎γߴ�_��֮��,���o�D�������ڶ��Ӵň��ʹ�䓴ň����F���L�ȵij˷e���C���������ڹ���ԭ������·��B���D��Ӌ��ȷ��棬����ʽ���M늄әC�ͬ����ʽͬ��늙C������ʽ���M늄әC�ͬ����ʽͬ��늄әC����ͬ���c�����D���c�����F���L�ȳ����ȣ����eֻ��ͬ��늄әC�Ķ��Ӵň����S�Դ�l��ͬ�������D�ň��������M늄әC���Ӵň����Sͨ��}�_�l�ʵ��A�S���D�ň���
�ɈD��Ҋ�����ӽY���c����ʽ���M늄әC������ͬ�������F�ķֳ�8���O�X���O�X����С ���ʽ���M늄әC������ԭ����ͬ�ڷ���ʽ���M늄әC��Ҳ��ͬ������ʽ���M늄әC�������ܺ������������ʽ�ͷ���ʽ���M늄әC�Ļ�ϣ����ڻ�����ͬ����·Ӌ�㡢�D��Ӌ�㶼������������ʽ�ͷ���ʽ���M늄әC�����P��ʽ�����ڴ�·��B���ň����á��ň�֮�g�Pϵ�ȷ����������������c��
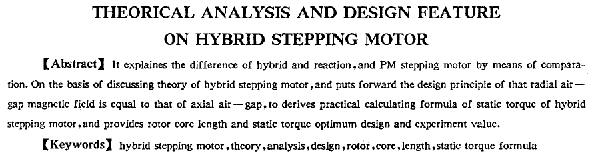
���ʽ���M늄әCͨ�������ࡢ���࣬��Y����D1��ʾ���DJ�����������ʽ��
�M늄әC�ĽY����
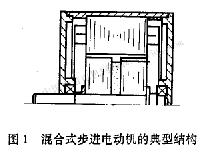
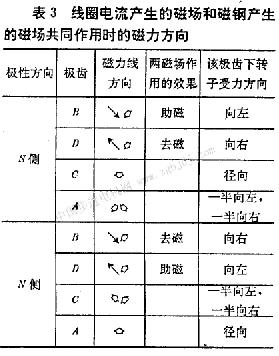
�X��Ƕ��Ȧ���D���ɶ����F�����g�Aһ�K�h�δ�䓣��D���F��Ҳ��С�X����䓃ɶ��F�Ļ����e�_�낀�X�ࡣ����S���š����f�����㣬����������չ�_,��D2��ʾ���D�����沿�֞���s�O�Ԃ����森���沿�֞���N�O�Ԃ����档�F�O�����D���X̎�ڈD2��ʾλ�á��D��̓����ʾ��䓮a���Ĵ�ͨ��������ʾ��Ȧ����a���Ĵ�ͨ���ȼٶ����Ӿ�Ȧ�]��ͨ������˕rֻ�д�䓮a���Ĵ�ͨ����D��̓����ʾ����䓃ɂȘO�Դ����������D�������������1��ʾ��
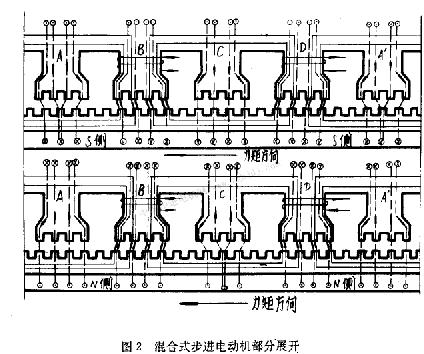
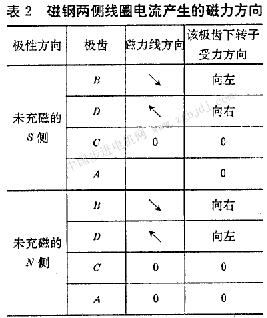
�ɱ�1��֪����s�O�Ԃȣ���䓮a���Ĵ�����B�O�X��D�O�X���D�����������
����A�O�O�X���D����������������C�O�X��ֻ�a���������������N�O�Ԃȣ�V�O�X��D�O�X���D���������������c�O�X���D����������������A�O�X��ֻ�a�������������������늙C������䓮a���Ĵ�����B��D�O�X�ڴ�����҃ɂ��D���������������s�O�Ԃ�A�O�X��N�O�Ԃ�C�O�X�D�������������s�O�Ԃ�c�O�X��N�O�Ԃ�A�O�X�D���ܵ��ď��������������������ķ����������ʽ���M늄әC����Ȧδͨ���ǰ����䓮a���Ĵ����ژO�X֮�g̎��ƽ���B�������a���D�ء�һ�_�b��ó��˴ŵ�늙C�����|�D�ӕr�����ش��ڣ��@������ͨ���Q֮�������أ���ֵ��С��������5n���C���D�خa���ġ�
혱�ָ�������ָд������^��r���f��늄әC�ӹ��ȴ����|�����}��
���D�Ӵ�䓛]�г�ţ����ྀȦ��J[)�ྀȦͨ����D�������������O�����D������λ�ò�׃���˕r���Ӿ�Ȧ�a���Ĵ�ͨ·����D�Ќ�����ʾ����䓃ɂȾ�Ȧ����a���Ĵ����������2��ʾ��
�ɱ�2��֪����Ȧ����a���Ĵ�������δ��ŵ�s�O�Ԃȣ�B����)�O�X���D�����������������N�O�ԂȽY����ͬ��C��A�O�X�o�������á������Y����������ʹ�����D�ӱ����_����ʽ���M늄әCһ�ӵ��X�ۡ��������@�M݆��ͨ늕r�������a���������أ�Ҳ�Ͳ����@ʾ���M�\�ӡ��Mһ������������ÿ�O�X�X�Ō��mȻ�S�D���D��׃����׃���������f��ͨ��@�M݆��׃���r���M�����ֵ��ͬ���ń�һ�ӣ����a����ͬ��С�Ĵ�ͨ��ʹÿ�O�X�Ĵ����l��׃�������Ǯa��ƽ�����Č����O�X����׃����ͬ���ģ��������Ĵ�С�ͷ�������D��ʼ�K̎��ƽ���B�����@�F�D�ࡣ��Ҋ�����о�Ȧ����a���ď���ň�����ʹ�ň�λ�ø�׃�r��Ҳ�����ܮa���D�ࡣ
�O�����D������λ�ò�׃����Ȧ����a���Ĵň��ʹ�䓮a���Ĵň���ͬ�����µĴ���
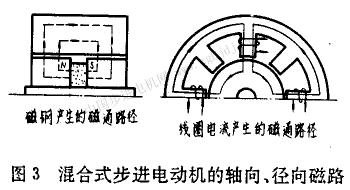
�������3��ʾ������ʹ�������ı�ʾ�c�D2����1����2���Ǻϣ����е��p�����^��ʾ��䓮a���Ĵ�ͨ·���ʹ����ķ�������ʾ��Ȧ����a���Ĵ�ͨ��·���ʹ����ķ���
 ��3��ʾ�Y����������䓘O�ԃɂȵ�C��A�O�X����o��Ȧ�������䓴ň��a���ď��������������������Ҵ����������������a���D�ء���s�O�Ԃȵ���}�O�X�σɃɴň��@ʾ�������ã�D�O�X�ϣ��ɴň��@ʾȥ�����ùܘӸ�׃��ͨ�ǰ�O�X�´ň��ķֲ���ʹ��䓴ň��a���Ĵ�С��ȷ����෴��ƽ�����l����׃��������B�O�X�������ӣ�D�O�X�����p�����Y��ʹ�D�Ӯa��������D�ء�N�O�Ԃȶ��෴��B�O�X�σɴň���ȥ�����ã�D�O�X���������ã���ʹD�O�O�X�������ӣ�B�O�X�����p�����Y���s��Ȼʹ�D�Ӯa��������D�أ��@���Ǟ�ʲô��䓃ɂ��F���e�_�낀�X��ľ��ʡ� �����ϵķ����ɿ����������늙C�����е����÷�ӳ������늙C�����c����һ��������ʽһ�ӣ������D�ӱ����_���X��ʹ��������ú�С�����@һ�c���ۣ����ʽ���M늄әC�ɿ���������ʽ�ͷ���ʽ���M늄әC���߃��c�ĽM�ϡ��P���J�飬���ʽ���M늄әC��Ȧ����a���Į��O�ň������ڴ�䓮a���ĆΘO�ň�����׃��ÿ�O�ň��ķֲ���ʹ�O���a���˴�λ�ԓ��λ���S����ͨ�����ͬ��׃�����������ښ�϶�����Ō��a���D�أ����F늄әC�IJ��M�\�ӡ��@�N���S��ň�����A������ň������ã��ֻ��ڷ���ʽ�Ĺ���ԭ�����ጻ��ʽ�ĺ�������������������ڻ��ʽ���M늄әC�ǻ��ڷ������ع����ģ���˿ɰ�������һ�_��Ч�ķ���ʽ���M늄әC���c����ʽ���M늄әC�IJ�eֻ�ǘO�X�µĴń������Դńݺ͆ΘO�ńݵĺϳɡ�
3�OӋ���c
���ʽ���M늄әC��������Փ���A�ǚ�϶�ň��鶨�Ӿ�Ȧ�a���Į��ԏ���ň�����䓮a�����S��ΘO�ň������ã����O�X�µĚ�϶�ń݉�����ͬ���@����ֵ�c�����D���X�ӽY�������S�D��׃���ĴŌ������ã��a���D�ء����eָ������϶�ň��ĺϳɲ�����һ��늄әC�ǘӞ�ɴň���ʸ���ϳɣ���ֵ����ӣ����ǃɂ��ň������g�Ӝp���@���������c֮һ��
�菊�{ָ�����ǣ���϶�ϳɴň������g�B�ӣ�ֻ���ڏ����϶�ň��Ĉ���С�ڻ�����S��ň��r�ų�����������ň��Ě�϶�ň����ȳ��^�S��ň��r�����^���ֵĈ������a�����أ��@����鳬�^���ֵĴň��ژO�X֮�g�����ã��c���δ���ǰ���Ӿ�Ȧ����a���ď���ň��Ϊ����Õr��Ч����ͬ���@�ǻ��ʽ���M늄әC�OӋ�υ^�e���������늄әC����Ҫ������ʹ�O�X�����϶�ň�С�ڵ����S���϶�ň�����ʽ���M늄әC���OӋԭ�t����ȕr��****�OӋ��ͨ�����κ�늙C����һ�����m�Ě�϶���ܣ��@��ٶ�B�鳣���������������Ɍ�������ʽ��
ʽ�Ц�f�����S��ń��ښ�϶�Юa���Ĵ�ͨ
�ա������Ӵń��ښ�϶�Юa���Ĵ�ͨ
p����늙C�O��
lһ늙C�F���L
���x���˴�䓡��_����늙C�ȏ����x���˺��m���X�ӳߴ�֮��,��ʽ(3)��Ҋ����䓮a�����S���ͨ���J���c늙C�F���L�ȟo�P����Ȧ����a���ď����ͨ�S�L�����p�����p������ʹ��϶�ň����������ʹ�S��ň����ڏ���ň�������һ���ߴ硢ij���|��䓣���Ȼ������һ��****�F���L�ȡ�
߀Ҫָ�������ʽ���M늄әC�Ĵ�·��D3��ʾ�����Ǐ����·���S���·�Ļ�ϣ���϶��߅�X��̎����****��Ȼ���S����ߴ���������u�pС�����`�������X�˴���ȡ��ʹ��ܞ�****���ɈD��Ҋ��ܗ���X���ֵĴ��������������ܣ��S������������ܣ��������ηֲ����ܣ��@�ǻ��ʽ���M늄әC����һ���c��
ֻҪע������ᵽ�ĸ�����c�����ʽ���M늄әC���OӋ�����ͬһ������늙C,���OӋ������в�e�����ȴ_��늙C�ď���γߴ磮�x���䓲��Ϻͳߴ磬���x�F���L��Ӌ�����S���·�ĴŌ����L�ƴ�䓹����D����������Ч��ͨ�����㵽�O�X�˴��ܣ������̫С���t���L�F���L�ȣ���֮��Ȼ���{��������Ӌ�㣬ֱ���õ����m��****�F���L�Ȟ�ֹ�����Եȴ��ܞ���ʣ�Ӌ��늙C���o���أ����o����̫С,�����Ӳ��Δ���ʹ�o����ֵ�M�㼼�gҪ��Ȼ��ͨ�^�·�͏����·��Ӌ�㣮�_���a������ň�����ľ�Ȧ������늙C�OӋ��늡��š�������Ķ�Ŀ�˺�����Ӌ���^�����η��͡�
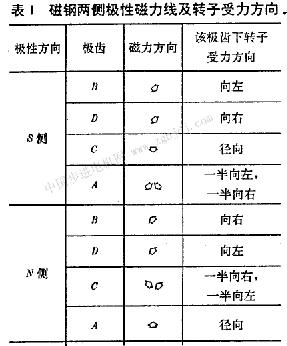
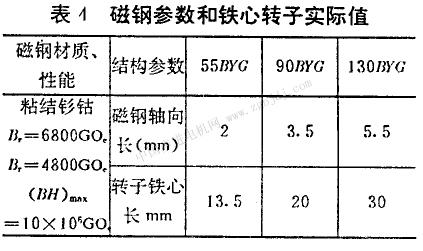
��4���������Ƶ�55BYG��99BYG��130BYG�x�ô�䓅������F���D�ӌ��Hֵ��
�������ʽ���M늄әC�Ĺ�����Փ���A�ʹ�����Փ���Ƶ�늙C�����غ������_ʽ�ͺ��Ό��õ�ܣ���o�D�ع���Ӌ��ʽ��
ʽ��T��������
zr�����D���X��
C�����ɽY�����є��Q���ı�������
�ա������ؽ�
ʽ��M�������ʽ���M늄әC��****�o�D��
Ze----һ����ÿ�O�X�X��
zr�����D���X��
le=kd����ÿ���D���F��Ӌ���L��
l����ÿ���D���F���L(cm)
kpe----�B��ϵ��
n��������䓔����߲��D���F�ĶΔ�
G1----��϶�ȴŌ��Ļ�����ֵ
(H��cm)
Fgs---�����O�X��߅��϶�ϳɴň��ń݉�����(A)
k������ͬͨ늠�Bϵ����һ��ͨ늕rk=1������ͨ늕rk=2cos��/m��������늙C��k
=��2
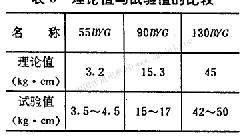
��ʽ(5)Ӌ���������C��̖��****�o�D����Փֵ����5����Փֵ��ԇ�ֵ�ı��^��
�ɱ�5��֪�����߱��^�Ǻϡ�
4 �YՓ
a�����ʽ���M늄әC�������Դň����S��ΘO�ň������ã����O�X֮�g�Ĵńݲԓ�ń������ښ�϶�����Ō��a�������D�ء�
6�����ʽ���M늄әC****�OӋ��ʹ�S��ň��͏���ň���ȣ��Դ˞���A���Ԍ���ij���|��䓵�****�D���F���L�ȡ�
c�����ʽ���M늄әC�o�D��Ӌ�㹫ʽ�c����ʽ���M늄әC�ͬ��ֻ�ǹ�ʽ�и����ĺ��xҪע����ʽ���M늄әC���������c��
|