�����(l��i)���C(j��)�õ��ˏV���đ�(y��ng)�ã����Ԅ�(d��ng)���ơ���(sh��)ֵӋ(j��)�㵽��̖(h��o)̎������(g��)�I(l��ng)���C(j��)���l(f��)�]�˷e�O�����á���(du��)�����O(sh��)��ĸ��b���ơ����܃x�����^(gu��)�̿��ƣ��������C(j��)�������ܲ������ò��M(j��n)늄�(d��ng)�C(j��)���D(zhu��n)�Qý�飬���C(j��)�����̖(h��o)�D(zhu��n)�Q��C(j��)е��(d��ng)�����Ķ����ƈ�(zh��)�ЙC(j��)��(g��u)���Ƅ�(d��ng)�����Ƅ�(d��ng)�ٶȺ��Ƅ�(d��ng)���x�����������ಽ�M(j��n)늄�(d��ng)�C(j��)(150BF5)��������B��ܛ����(l��i)����������Ӳ��߉���O(sh��)Ӌ(j��)һ��(sh��)�õIJ��M(j��n)늄�(d��ng)�C(j��)�(q��)��(d��ng)����ԓ����������C620-1B��ͨ܇���ĸ����С�
���M(j��n)늄�(d��ng)�C(j��)��һ�N���}�_���̖(h��o)�D(zhu��n)�Q�ɽ�λ�ƻ�ֱ��λ�Ƶľ��܈�(zh��)�к��(q��)��(d��ng)Ԫ�����ڃx�����Ԅ�(d��ng)���b�ú��I(y��)�Ԅ�(d��ng)����ϵ�y(t��ng)�У����M(j��n)늄�(d��ng)�C(j��)Ҫ�����ڲ�ͬ���ٶȈ�(ch��ng)�ϡ���(du��)�ڵ��ٹ�����(ch��ng)�ϣ��t����ֱ�ӆ���(d��ng)�����ú��ٹ�����ʽ�O(sh��)Ӌ(j��)ܛ������(d��ng)���M(j��n)늄�(d��ng)�C(j��)�ڸ��و�(ch��ng)���¹����r(sh��)���Ͳ��ܲ��ú��ٹ�����ʽ����?y��n)��ɲ��M(j��n)늄�(d��ng)�C(j��)�Ķ��l���ԣ��D1��150BF5���M(j��n)늄�(d��ng)�C(j��)�Č�(sh��)�y(c��)��������֪���D(zhu��n)��M���l�ʵĺ���(sh��)��1989�꡶늙C(j��)����3�ڣ����٘s���d�ġ���(sh��)�ؙC(j��)���ò��M(j��n)늄�(d��ng)�C(j��)�ĺ��������l���ԣ���B���ಽ�M(j��n)늄�(d��ng)�C(j��)�ڵ��l����r(sh��)�����c(di��n)�����\(y��n)�о��l���Ծ�����ڵ��l��������F(xi��n)�°��F(xi��n)�����ԣ����M(j��n)늄�(d��ng)�C(j��)ֱ�ӆ���(d��ng)��****�l����һ����ֵ�������(sh��)�H�\(y��n)�е��l�ʴ����@һ����ֵ�����M(j��n)늄�(d��ng)�C(j��)ֱ�ӆ���(d��ng)�͕�(hu��)���F(xi��n)ʧ���F(xi��n)����ˣ�Ҫʹ���M(j��n)늄�(d��ng)�C(j��)�ڸ������\(y��n)�У�����Ե��ن���(d��ng)��Ȼ�����������ٵ����٣�ͬ�ӣ����M(j��n)늄�(d��ng)�C(j��)�����ڸ����\(y��n)�Р�B(t��i)��ͻȻֹͣ����t�����ڑT�����ö����ܳ��F(xi��n)�^(gu��)�_�F(xi��n)������Ҫ�Ը��������������٣������ܿɿ���ֹͣ��Ҫ�M���@�ɷN�����^(gu��)�̵�Ҫ���M(j��n)늄�(d��ng)�C(j��)�ͱ�횲���׃�ٷ�ʽ��������������̎����ʽ���@Ҳ����߲��M(j��n)늄�(d��ng)�C(j��)��ͣ�l�ʵ��P(gu��n)�I����Ҋ(ji��n)�����M(j��n)늄�(d��ng)�C(j��)�(q��)��(d��ng)����(y��ng)��Q�}�_���䡢�\(y��n)�D(zhu��n)����Ͳ���(sh��)���l�ʣ������Լ�������̎���ȡ�
��(du��)��һ�_(t��i)���ಽ�M(j��n)늄�(d��ng)�C(j��)������_(t��i)�������傀(g��)ͨ��@�M����Ҫ�C(j��)���傀(g��)������̖(h��o)���ɲ����C(j��)���ɱ������I(y��)��W(xu��)��ӏS���a(ch��n)��TPSTDϵ��ģ�壺TP STD880IB280A���CPU�塢TP STD 8601���I��O���ư弰�I�P(p��n)���@ʾ��ȽM�ɣ��IJ���PIO�ӿڣ�������16�l�ɾ��̵�I��O����ͨ�^(gu��)���̿�ʹPIO�ڽ��ջ�l(f��)�Ͷ�N��Ϣ����PIO�ڵ�A��(��ڵ�ַ��78H)���O(sh��)�Þ�ݔ��������ʽ������PAo��PA����λ��(l��i)�������ಽ�M(j��n)늄�(d��ng)�C(j��)���傀(g��)ͨ��@�M����(d��ng)ijһλ��l�r(sh��)���l(f��)�����}�_ʹ���M(j��n)늄�(d��ng)�C(j��)�Č�(du��)��(y��ng)��ͨ늣���(d��ng)ijһλ��0�r(sh��)��ʹ���M(j��n)늄�(d��ng)�C(j��)�Č�(du��)��(y��ng)����늣��Ķ����Ʋ��M(j��n)늄�(d��ng)�C(j��)�D(zhu��n)��(d��ng)��
Ҫʹ���M(j��n)늄�(d��ng)�C(j��)�B�m(x��)�D(zhu��n)��(d��ng)����Ҫͨ�^(gu��)ܛ�������}�_ݔ��������}�_���䡣
��(du��)������(A��B��C��D��E)���M(j��n)늄�(d��ng)�C(j��)���乤����ʽ�ж�N�����IJ���2- 3- 2-3������ʽ��������ʮ�Ĺ�����ʽ����ͨ�^(gu��)���?y��n)?/DIV>
���D(zhu��n)��AB- ABC-BC��BCD��CD-CDE��DE��DEA- EA-EAB��AB
���D(zhu��n)��BA--BAE-AE��AED--ED��EDC��DC -DCB-CBһCBA-BA
���ù�����B(t��i)�ց�(l��i)��(sh��)�F(xi��n)�@һͨ�������1��ʾ�������ò��������(sh��)�F(xi��n)���M(j��n)늄�(d��ng)
�C(j��)���}�_���䣬������\(y��n)���ٶȡ��䷽���ǣ����C(j��)���A����(n��i)�_(k��i)��һ�M��Ԫ(TA-BLE+O��TABLE+1������)�����δ�Ų��M(j��n)늄�(d��ng)�C(j��)�Ĺ�����B(t��i)�֣��üĴ���HL�����B(t��i)�ֵĵ�ַָᘡ���(d��ng)�����(zh��)�Еr(sh��)������(j��)��ַָ����Ώă�(n��i)���Ԫ��ȡ����B(t��i)���͵�ݔ����(PIO A��)�����D(zhu��n)�r(sh��)��ʹָ�HL��μ�1�����D(zhu��n)�r(sh��)ʹָ�HL��Μpl���Ķ����Ʋ��M(j��n)늄�(d��ng)�C(j��)�������D(zhu��n)��
3.3���M(j��n)늄�(d��ng)�C(j��)���ٶȿ���
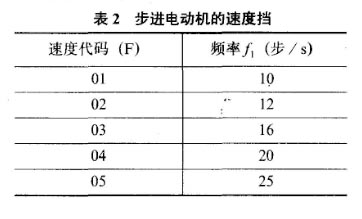
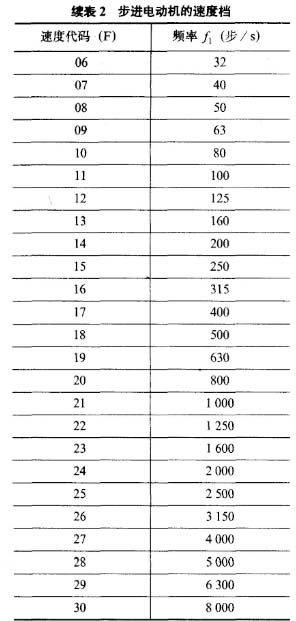
�ڌ�(sh��)�H��(y��ng)���У���Ҫ���M(j��n)늄�(d��ng)�C(j��)�������N�l���¹���������(du��)���M(j��n)늄�(d��ng)�C(j��)�M(j��n)���{(di��o)�٣����Ԍ����M(j��n)늄�(d��ng)�C(j��)�Ĺ����l�ʷֳɲ�ͬ�ıƶșn�����ô��a���ٶȴ��a��ʾ����λ�Բ���s��ʾ��������?q��)��ٶ���?0��(g��)�����������\(y��n)���l��Ҋ(ji��n)��2����һ�ȱȼ�(j��)��(sh��)�ֲ�����
3.4�����O(sh��)Ӌ(j��)
Ҫʹ���M(j��n)늄�(d��ng)�C(j��)�����\(y��n)�D(zhu��n)���������ن�ͣ�l�ʣ���(y��ng)ʹ���M(j��n)늄�(d��ng)�C(j��)�ں����c׃�كɷN��ʽ��Y(ji��)�ϵ���r�¹������@��Ҫ�x��һ�l���^���m���\(y��n)��Ҏ(gu��)��������������O(sh��)Ӌ(j��)�Ļ��A(ch��)��
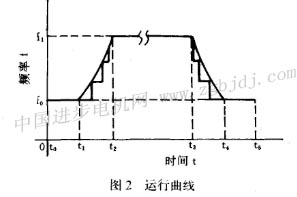
�IJ��M(j��n)늄�(d��ng)�C(j��)�ľ��l���Գ��l(f��)������(j��)�D(zhu��n)���S�l��׃������r��(l��i)�x��һ�l�\(y��n)���������ĈD1�ľ��l���Է����������@�N���Ե����������Dz���׃���ٶȣ���ָ��(sh��)��(f=foet/T�\(y��n)������(��D2��ʾ)���ھ��̕r(sh��)�����xɢ����һ�_(t��i)�A������������ָ��(sh��)�͡��@�N�������^���ϲ��M(j��n)늄�(d��ng)�C(j��)�Ӝp���^(gu��)�̵��\(y��n)��Ҏ(gu��)�ɣ��ܳ�ֵ����ò��M(j��n)늄�(d��ng)�C(j��)����Ч�D(zhu��n)�أ�����푑�(y��ng)�Ժã��s���������ٵĕr(sh��)�g�����ɷ�ֹʧ�����^(gu��)�_�F(xi��n)�����������M(j��n)늄�(d��ng)�C(j��)�Ա��^�͵��l��fo�����ؼ��ٵ���(w��n)���\(y��n)���l��f1������(sh��)�H������Ҫ�_(d��)�����l�ʣ������M(j��n)늄�(d��ng)�C(j��)��f1��(w��n)���\(y��n)������Ҫ�Ĵ֕r(sh��)�g���Բ���(sh��)���ف�(l��i)����������?g��u)��k�l�ʾ����ؽ���fo����f0�\(y��n)��һС�Εr(sh��)�g��������Ŀ��г̺���ֹͣ��
3.4.1�����\(y��n)��
��(du��)�ڵ��ٹ�����r��(f1o)��ֱ�ӆ���(d��ng)��һ��fo=1000����s���ң���(du��)��ͬ�IJ��M(j��n)늄�(d��ng)�C(j��)��fo���M(j��n)���{(di��o)�����M(j��n)�Ќ�(sh��)�y(c��)��������@�ӌ�(du��)��ǰ��21��(01��21)�ٶȾͲ��ز���������̎��������ֱ�����冢��(d��ng)�����\(y��n)������Ҫ�Ŀ��г̣���(du��)�ں�9��(22��30)�粻���]�����ٲ��֣��t����fo�����\(y��n)�С����@�ɷN��r�£�Ҫ�_(d��)��ÿ����Ҏ(gu��)���ĺ����\(y��n)���l�ʣ���Ҫ�����ӕr(sh��)��ʽ���ɲ���Z80 CTC�Дʽ�ͷ��Д�ܛ����ʽ�����IJ��ú��ߣ������ò�����g(sh��)�_(d��)���������ٶȡ����ȸ���(j��)��(sh��)�H�\(y��n)���l��f1Ӌ(j��)�����Ҫ���ӕr(sh��)�r(sh��)�g������ԓ����ÿ��һ������ĕr(sh��)�g��������������{(di��o)���ӕr(sh��)�ӳ���ķ����_(d��)���@һĿ�ģ��@�r(sh��)���ӕr(sh��)�r(sh��)�g�����r(sh��)�g����(sh��)TD������(du��)��(y��ng)�P(gu��n)ϵ���3��ʾ���������l��4MHz�r(sh��)����
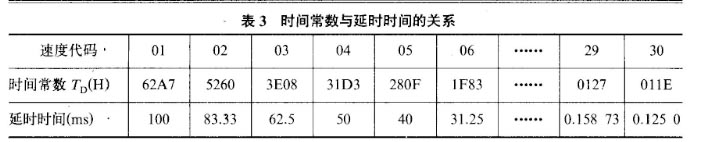
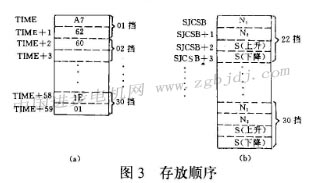
�ٌ������ĕr(sh��)�g����(sh��)TD�������TIME����ַ�ı��У�ÿ���r(sh��)�g����(sh��)ռ�ɂ�(g��)���A��Ԫ�����ֹ�(ji��)��ǰ�����ֹ�(ji��)�ں����w������Ҋ(ji��n)�D3a��ʾ�������(zh��)�Еr(sh��)������(j��)��ַ���ٶȴ��aֵͨ�^(gu��)׃ַ�Ĵ���IX: IX-TIME-2+�ٶȴ��aֵ��2ȥ��������(y��ng)�ĕr(sh��)�g����(sh��)TD�����ͼĴ���HL����(j��ng)�ӕr(sh��)�Ϳɫ@������Ҫ���ٶȡ�
3.4.2׃���\(y��n)�У��ӣ��p���^(gu��)�̣�
׃���\(y��n)�У���(du��)��9�����ٶȣ��^(gu��)�̾��LjD2��tl��t2�����^(gu��)�̺�t3��t 4�p���^(gu��)�̡��錍(sh��)�F(xi��n)�@һ�^(gu��)�̣�����(j��)ָ��(sh��)��ʽ���Õr(sh��)�g�xɢ���k����ʹ���M(j��n)늄�(d��ng)�C(j��)ÿ��һ����һ�ȼ�(j��)���١��p�١���ԭ����ͨ�^(gu��)��׃�ӕr(sh��)�r(sh��)�g��(sh��)�F(xi��n)�ٶȵĸ�׃�����ڼ����A�Σ�tl��t2�������M(j��n)늄�(d��ng)�C(j��)��f0�_(k��i)ʼÿ��һ�����ӕr(sh��)�r(sh��)�gT0�f�pһ��������(sh��)�F(xi��n)������������(d��ng)�ӕr(sh��)�r(sh��)�g�f�p��T1�������ps�Σ��r(sh��)�ͼ��ٵ����l�ʣ��@ͨ�^(gu��)��(sh��)�й�ʽ���C�������p�ٕr(sh��)�����M(j��n)늄�(d��ng)�C(j��)��f1�_(k��i)ʼÿ��һ�����ӕr(sh��)�r(sh��)�g�����f��һ��������(sh��)�F(xi��n)�p���½�����(d��ng)�ӕr(sh��)�r(sh��)�g�f���������r(sh��)�ͽ�����fo�l�ʡ����@һԭ���M(j��n)�г����O(sh��)Ӌ(j��)����(du��)һЩ����(sh��)�M(j��n)���{(di��o)����ͨ�^(gu��)�ؚw���������C��������������ǰ�����x��ָ��(sh��)���\(y��n)����������������ׂ�(g��)���̕r(sh��)�õĎׂ�(g��)����(sh��)��
�����ӕr(sh��)�r(sh��)�gTB=0.05 (ms)
����(d��ng)�l�ʞ�f0�r(sh��)T0=1��f0
��(sh��)�H�\(y��n)���l�ʞ�f1�r(sh��)T1=1��f1
����(d��ng)�����ٕr(sh��)���ӕr(sh��)����(sh��)N1=T0��TB
�Kֹ���p�ٕr(sh��)���ӕr(sh��)����(sh��)N2=T1��TB
�f�������f�p����(sh��)S=N1-N2+1
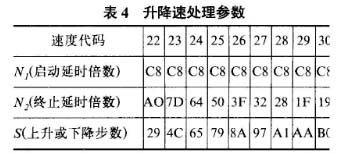
����(j��)�������x��Ӌ(j��)��������م���(sh��)���4��ʾ��
ע��Nl��Nz.S����ʮ���M(j��n)��
������ԭ�����������ą���(sh��)�Ƴɱ���������SJCSB����ַ�ă�(n��i)���У������D3b������š���(d��ng)Ҫ�M(j��n)��������̎��r(sh��)������?q��)����?j��)�ٶȴ��a����ַSJCSI�Ԅ�(d��ng)ȥ���Ҹ��������P(gu��n)����(sh��)���Ķ���(sh��)�F(xi��n)������̎�����@��������̎�텢��(sh��)�ķ����ǣ����{(di��o)�ò��M(j��n)늄�(d��ng)�C(j��)�(q��)��(d��ng)����ĸ����ܳ����У�ͨ�^(gu��)Ӌ(j��)�㹫ʽ��SJCSB - 04Hʮƫ����ƫ����=(�ٶȴ��a- 15H)��4�����õ���(du��)��(y��ng)�ٶȓ���������̎�텢��(sh��)����ַ������IX�Ĵ��������ַָᘣ��ٌ��䅢��(sh��)(N1��N2��S)ȡ��������(N1DY)��(N2DY)��(S1DY)��(S2DY)�Ă�(g��)���A��Ԫ�У��D4��ijһ���ܳ�����ಽ�M(j��n)늄�(d��ng)�C(j��)���C(j��)���ƈD�����Ա��ڲ��M(j��n)늄�(d��ng)�C(j��)�(q��)��(d��ng)�������M(j��n)���{(di��o)�á�
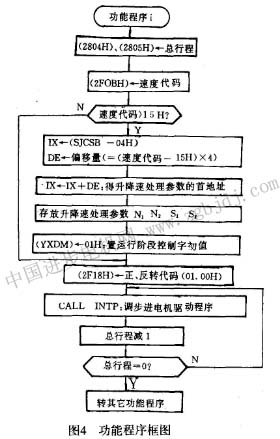
����(j��)������ԭ���ͷ���������(g��)�(q��)��(d��ng)����(INTP)�ֳɺ����\(y��n)���c������̎��ɴ֣��D�ԣ�����������̎�������ַ֞��傀(g��)�\(y��n)���A�Σ��ô����(YXDM)��Ԫ�еĿ����ց�(l��i)���֣�01H��ʾ��f0����(d��ng)�����\(y��n)���A�Σ�02H��ʾ�����A�Σ�03H��ʾ��f1���ٷ�(w��n)���\(y��n)���A�Σ�04H��ʾ�����A�Σ�05H��ʾ�½����ԏS�������\(y��n)���A�Ρ��(q��)��(d��ng)����INTPͨ�^(gu��)�ܶ���A��Ԫӛ�������N��(bi��o)־�����\(y��n)���ṩ�Д��l����
FLVϵ��늙C(j��)
���ձ��ŷ�����˾�_(k��i)�l(f��)��FLVϵ��늙C(j��)���Ɍ�(sh��)�F(xi��n)�߾��Ȕ�(sh��)�أ�ʹ�÷��㣬�Ӝp�ٕr(sh��)�ٶ�ƽ��(w��n)�����о��_���ܣ�׃�ٷ���25��3 175r��min�����ÙC(j��)��(n��i)��X��ӛ��7�N�ٶȣ�ȫ�ٷ�����(n��i)���ٶ�һ�D(zhu��n)�����Է�(w��n)���� (�������g���տ����C(j��)е�O(sh��)Ӌ(j��)��V01.35��NO1��1991)
FICSϵ�п�����
�ձ��_(d��)���ǿ�˹�_(k��i)�l(f��)��FICS-98��2��98��3�Ϳ��Ɔ�Ԫ������NEC PC9800������ֱ���ŷ�늙C(j��)�������ŷ�늙C(j��)���}�_늙C(j��)�Ȍ�(sh��)�F(xi��n)�����ܡ������ٶ�λ�����M(j��n)��2�S��3�S���ƣ��ȿ��M(j��n)��2�S��3�Sͬ�����ƣ���ɸ��S��(d��)�����ơ�
(�������g���տ����C(j��)е�O(sh��)Ӌ(j��)��V01.35��No��4��1991)