�o��C��늙C(j��)���o�һ�Y(ji��)��(g��u)�������Ԫ����
����1.2���S����1
��1 ��ɽ��W(xu��)���ػʍu066004��2�Ϻ�����b������˾���Ϻ�201203��
ժҪ��ԓ�Ľ�B���o��C��늙C(j��)�Ļ�������ԭ����ͨ�^����ϵ�y(t��ng)�д��ڵ��o늽Y(ji��)��(g��u)����P(gu��n)ϵ�����M(j��n)���xɢ��̎���������˽Y(ji��)��(g��u)��(ch��ng)���o늈�(ch��ng)������Ԫ���ƽ�ⷽ�̡�ӑՓ���o늈�(ch��ng)�ͽY(ji��)��(g��u)��(ch��ng)֮�g���ڵ���ϗl������(ch��ng)��߅��l�����ɽY(ji��)�c(di��n)ӳ���ƌ�(d��o)��λ�ƺ����ڃ������(ch��ng)�������ς��f�ı��_(d��)ʽ�����Y(ji��)���o�һ�Y(ji��)��(g��u)��φ��}�ĵ�������D��Ԕ��(x��)���E��ͨ�^��(du��)ϵ�y(t��ng)������Ԫ���棬�õ�����݆�ď���λ�Ʒֲ������Sϵ�y(t��ng)����(sh��)��׃��Ҏ(gu��)�ɡ����õĽY(ji��)�����M(j��n)һ���о�늙C(j��)�������ṩ������(j��)��
�P(gu��n)�I�~���o��C�����o늽Y(ji��)��(g��u)��ϣ���ϗl����߅��l��������Ԫ
�ЈD���̖(h��o)��TM359. 9��THl32. 2 �īI(xi��n)��(bi��o)־�a��A ���¾�̖(h��o)��
0�� ��
�C(j��)�ϵ�y(t��ng)��MEMS)�nj���(x��)�ӹ����g(sh��)�c�����ܼӹ����g(sh��)��Y(ji��)�ϣ��������ߴ��(0. 5 - 500) ym�ĿɄ�(d��ng)�����M�ɵģ��߶ȼ��əC(j��)е������c������һ�w��ϵ�y(t��ng)���S��ϵ�y(t��ng)�ߴ�IJ����pС���o������F(xi��n)���șC(j��)е����늴��������@�ă�(y��u)��(sh��)���o��(q��)��(d��ng)��u�ɞ�MEMS�I(l��ng)����õ��(q��)��(d��ng)��ʽ���о�����������φ��}�tһֱ��MEMS�I(l��ng)���P(gu��n)ע����Ҫ�n�}��
Endemano�Ƚo����һ�N�t(y��)���p�����p�D(zhu��n)�ӵĔ[��(d��ng)ʽ�o�늙C(j��)��Ť��Ӌ(j��)��ģ�ͣ�SaITOS t���U���˾���8��(g��)����늘O�ĈA��ʽ�͈A�Fʽ�[��(d��ng)�o�늙C(j��)���O(sh��)Ӌ(j��)�Y(ji��)��(g��u)�����M(j��n)����һϵ�з����͜y(c��)ԇ�����������ģ�;�����ݔ���S�[��(d��ng)���D(zhu��n)���c����֮�g����Ħ����(d��o)���o��ܓpʧ��ȱ�ݡ����Ļ����C������(d��ng)ԭ�����һ�N�����o��(q��)��(d��ng)늙C(j��)�����o��C��늙C(j��)��
1�o��C��늙C(j��)�Ĺ���ԭ��
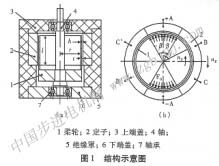
��Dl��ʾ���o��C��늙C(j��)�ĽY(ji��)��(g��u)ʾ��D���Dl(a)�У�����(d��ng)����݆1�ǰ돽��r����Ϭ��h����Ч׃���L�Ȟ�l�ı����X�ƈA������݆�����Ǻ�Ȟ�t�ı��ӿ՚⡣�����ǿ՚��֮���6�K�Á��ڲ�ͬ�r(sh��)��ʩ��늉��Ļ���^���Ľ��ٌ�(d��o)�w2�������ă�(n��i)���轛(j��ng)�^ꖘO����̎�����ԫ@��һ�Ӻܱ�����o��C��늙C(j��)���o�һ�Y(ji��)��(g��u)�������Ԫ�������ڣ��Ƚ��|(zh��)�ӡ���Dl(b)��ʾ���ڶ���2�ăɂ�(g��)����(du��)�Č�(du��)�Q�Ƕ�[ -p��p]���ȅ^(q��)AA��ʩ�ӷ�ֵ��ȡ��O��
�෴��늉���(hu��)����݆1�ı���a(ch��n)��һ���ĸБ�(y��ng)늺ɣ����ǃ�(n��i)������w֮�g�γ��o늈�(ch��ng)�����a(ch��n)����늈�(ch��ng)����D����ʾ�����o늈�(ch��ng)���������£���݆��Ȼ��(hu��)�l(f��)��һ����׃�Ρ�����ֵ��ȡ��O���෴��늉���/��ʾ�������ʩ���ڲ�ͬ������(du��)��(y��ng)�ăɂ�(g��)�ȅ^(q��)AA��BB��CC��(n��i)�t��݆��(hu��)������(y��ng)��λ�ðl(f��)��׃�Σ�����׃�ε������ԣ���݆��(hu��)��˶���n����ʾ�����D(zhu��n)��(d��ng)����������������A��B��C��A��B��C��6·��ֵ��ȵ�ֱ���_�P(gu��n)��̖(h��o)��ͬһ�r(sh��)�̃H�ɂ�(g��)��(du��)��(y��ng)�ȅ^(q��)ʩ�ӘO���෴��늉��������@�N늉�ʩ�ӷ�ʽ��ijһ��������ГQ����һ�ȅ^(q��)��
���o��C��늙C(j��)ϵ�y(t��ng)�У��o��(q��)��(d��ng)ʹ��݆�l(f��)��׃�ΏĶ��a(ch��n)���\(y��n)��(d��ng)��׃�ε���݆�ַ��^����׃���o늈�(ch��ng)�ķֲ�����˷���(f��)ֱ��ƽ�⡣ϵ�y(t��ng)�������\(y��n)�D(zhu��n)��ه����݆��׃�Σ���(zh��n)�_����Ч�ط�����݆���o늈�(ch��ng)�������µ�׃�����о�ϵ�y(t��ng)���d�������P(gu��n)�I���ڡ����Ļ��ڌ�(du��)ϵ�y(t��ng)����P(gu��n)ϵ�ķ���������������Ԫ���ƽ�ⷽ�̣�̽ӑ����ϗl����߅��l���������c(di��n)�o������݆����λ�Ƶķֲ�Ҏ(gu��)�ɡ�
2�o�һ�Y(ji��)��(g��u)��Ϸ���
2.1�Y(ji��)��(g��u)��(ch��ng)ƽ�ⷽ��
��(d��ng)늉�������ʩ�����o늈�(ch��ng)��߅���ϕr(sh��)������(g��)��φ��}��ҕ�����o�B(t��i)�ġ��o��C��늙C(j��)����݆�����늈�(ch��ng)�����Ì��l(f��)��׃�Σ���ѭ���ԽY(ji��)��(g��u)����Ԫ��Փ����ƽ�ⷽ�̣�
���У�k��Y(ji��)��(g��u)��(ch��ng)�����w���Ⱦ�ꇣ���s��Y(ji��)�c(di��n)λ����ꇣ�Fs���գ�x����늈�(ch��ng)��������݆�������������@Ȼ��늈�(ch��ng)���Ĵ�С���o늈�(ch��ng)��늄�(sh��)����늈�(ch��ng)��(n��i)�Y(ji��)�c(di��n)��λ��x��ͬ�Q����
2.2�o늈�(ch��ng)ƽ�ⷽ��
��݆��ӵ�늈�(ch��ng)����������˹���̼���߅��l����������
ʽ�У��Ş��늳���(sh��)�������o늈�(ch��ng)��(ch��ng)��(ch��ng)��߅���ɦ�b�ͦ�o�M�ɣ���(x)��늈�(ch��ng)��늄�(sh��)����ֲ���늈�(ch��ng)���g�Y(ji��)�c(di��n)λ�Ƶ�Ӱ푣���늈�(ch��ng)���g��׃������݆׃�ε�Ӱ푣�n��߅����ķ�����������߅ֵ���}�ȃr(ji��)�ڷ�����(p(z))����Сֵ���}��
��(d��ng)ǰ���}�У�L�����ɲ��֣��c��݆1�������o�N�Ŀ՚�Ӄ�(n��i)���棬��늄�(sh��)��0���c����2�ă�(n��i)����o�N�Ŀ՚������棬��늄�(sh��)��ʩ���ڶ���2�ϵ�늉�U�o����
����ʽͨ�^����Ԫ�xɢ�����D(zhu��n)����һ�M�ԽY(ji��)�c(di��n)늄�(sh��)������δ֪���ķ��̽M��
����
���У����P�е�Ԫ��Pij���c��Ԫ�κ���(sh��)Ni�����Լ�����(y��ng)��Ԫ����e���P(gu��n)��ϵ��(sh��)���½ǘ�(bi��o)����ʾ����Ќ�(du��)��(y��ng)���o늈�(ch��ng)���ԃ�(n��i)�IJ��֣���b��ʾ��(du��)��(y��ng)�ڈ�(ch��ng)���T߅��IJ��֣������o늈�(ch��ng)��늄�(sh��)������
2.3�o�һ�Y(ji��)��(g��u)��Ϸ���
늈�(ch��ng)���g��(n��i)�Y(ji��)�c(di��n)λ��z�ļ��r(sh��)�ֲ���������ڽY(ji��)��(g��u)��(ch��ng)������Ԫ����������
���ˣ������Ϸ����У�����(1)��(5)֮�g������(4)��(5)֮�g��(g��u)��ֱ�ӵ�����P(gu��n)ϵ��
�\(y��n)��Newton��������(du��)�����Ɉ�(ch��ng)����φ��}�M(j��n)����⣬��K������ꇷ��̽M��(y��ng)�飺
���У�Rs��RE��Rm���քe��ʾ�������ڵ����^���еĚ�����������(du��)��ʽ(6)��ʽ(7)��ʽ(8)�M�ɵķ��̽M�M(j��n)�о��Ի����ɵ�
ʽ��A���ſ˱Ⱦ��
��ʽ(9)�ɵã���n�ε���Ӌ(j��)���(ch��ng)׃�������Ĺ�ʽ�飺
2.4��ϗl���c߅��l��
�O(sh��)��s��ʾ�Y(ji��)��(g��u)��(ch��ng)�đ�(y��ng)����������E��ʾ�o늈�(ch��ng)������˹�f��(y��ng)��������n��ʾ��݆��늈�(ch��ng)�Ľ����棬��ij̎�ķ������t�������϶���֮�g����ƽ���P(gu��n)ϵ���£�
�������棬�σɈ�(ch��ng)֮�g��(du��)��(y��ng)�c(di��n)��λ�ƝM�����µ����ݗl����
ʽ�У�aE�齻�������o늈�(ch��ng)��(n��i)ij�c(di��n)��λ�ơ�
�@Ȼ���ڽ����棬�ϣ�߀��(y��ng)�����B�_�ԗl����
3λ�ƺ����Ă��f�P(gu��n)ϵ
3.1λ�ƵĂ��f
ӛ�o늈�(ch��ng)���������棬�ı�����E���Y(ji��)��(g��u)��(ch��ng)����������ӵı�����s�������o늈�(ch��ng)�c�Y(ji��)��(g��u)��(ch��ng)�ľW(w��ng)���ڽ����棬�ϵĽY(ji��)�c(di��n)����(du��)��(y��ng)��ͨ����Ҫ�Y(ji��)�c(di��n)ӳ��ķ�����(sh��)�F(xi��n)�Ɉ�(ch��ng)֮�g��λ�ƻ����Ă��f���O(sh��)���o늈�(ch��ng)߅���E�ϵĽY(ji��)�c(di��n)Hkӳ�����Y(ji��)��(g��u)��(ch��ng)߅���E�ϵõ��c(di��n)Sk���t�Y(ji��)��ʽ(121�������ýY(ji��)��(g��u)��(ch��ng)�Ć�Ԫ�κ���(sh��)Hk���ɵ��o늈�(ch��ng)��ԓ�Y(ji��)�c(di��n)��λ�ƞ飺
ʽ�У���s��Y(ji��)��(g��u)��(ch��ng)��Ԫ��(n��i)�Y(ji��)�c(di��n)i��λ��is��Y(ji��)��(g��u)��(ch��ng)��Ԫ�����(n��i)�Ć�Ԫ��(ji��)�c(di��n)��(sh��)Ŀ��
�\(y��n)��ʽ(12)��ʽ(13)��ʽ(14)����߅���ϵ�n��(g��)�Y(ji��)�c(di��n)ӳ������s�ϕr(sh��)���������ϵ�λ���ɦ�s��n��(g��)�Y(ji��)�c(di��n)��λ�Ʊ�ʾ�飺
ʽ�У���m��mxn���D(zhu��n)�Q��ꇣ�
��Ҋ��T���ɽY(ji��)��(g��u)��(ch��ng)�Ć�Ԫ�κ���(sh��)��(g��u)�ɡ�
3.2�����f
��֪���o늈�(ch��ng)��߅�����E�ϣ�ij�c(di��n)j��늈�(ch��ng)������ʽ�o����
ʽ�У�dA���E�ϵ�������e��
�æҺͦҷքe��ʾ�o늈�(ch��ng)߅���s�ͽY(ji��)��(g��u)��(ch��ng)߅���E�������S��̓λ�ƣ��t�Y(ji��)��ʽ(14)�ɵã���߅�����E�ϵ�n��(g��)�Y(ji��)�c(di��n)��늈�(ch��ng)��������̓�����Ա�ʾ�飺
���ڽY(ji��)��(g��u)��(ch��ng)߅�����s�w��������̓��������ʽ�o����
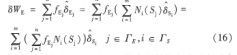
����(j��)�����غ�ԭ�����o늈�(ch��ng)�c�Y(ji��)��(g��u)��(ch��ng)���κΕr(sh��)�g��Ƚͨ�^���箋�������f��������֧ƽ�⣬����ʽ(16)��(17)�ɵã�
�t�ý�����f�����Ă��f��ʽ��
ʽ�У�F(xi��n)E��늈�(ch��ng)��������
4��φ��}�ĵ������E
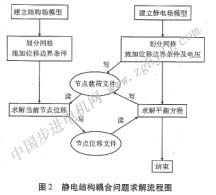
��(du��)�Y(ji��)��(g��u)��(ch��ng)���o늈�(ch��ng)ģ���M(j��n)������Ԫ�xɢ���ԺɈ�(ch��ng)֮�gͨ�^�����棬�ɂ�(c��)�ĽY(ji��)�c(di��n)��(sh��)�F(xi��n)λ�ƺ����Ă��f������(g��)��ψ�(ch��ng)���}��������̿��ÈD2��ʾ�飺
����(g��)��Ϸ��̽M�M(j��n)�е������^�̿��Ԛw�Y(ji��)�����ׂ�(g��)���E��
(1)�ڽ�������ϳ�ʼ����
(2)���Y(ji��)��(g��u)��(ch��ng)��λ���D(zhu��n)�Q���o늈�(ch��ng)��
(3)�ɷ���(7)����o늈�(ch��ng)��(n��i)��늄�(sh��)�ֲ��������M(j��n)һ�����늈�(ch��ng)��F
(4)���o늈�(ch��ng)���D(zhu��n)�Q���Y(ji��)��(g��u)��(ch��ng)��
(5)��ⷽ��(6)�õ��Y(ji��)��(g��u)��(ch��ng)��λ�ƣ�
(6)�O(sh��)ָ�����Ք��`���X���t�ɷ���(sh��)���_(d��)ʽ�(y��n)�C�Ք���
5����Ԫ����
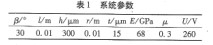
�o�����1��ʾϵ�y(t��ng)����(sh��)���o��C��늙C(j��)�����У�E���̷քe����݆���ϵď���ģ���Ͳ��ɱȡ�
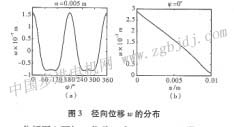
�����o��C��늙C(j��)���(q��)��(d��ng)�ͳ��d�����ںܴ�̶����ܵ�����׃�ε�Ӱ푣�����Է����䏽��λ�ƞ����c(di��n)��������ֲ���r��D3��ʾ��
�����D3��֪��λ��w�ڦ�=0����180�Ƚ������_(d��)�����****ֵ���ڦ������ό�������׃��Ҏ(gu��)�ɣ��ڦ�=0.01m�����ϣ�λ��wڅ��0
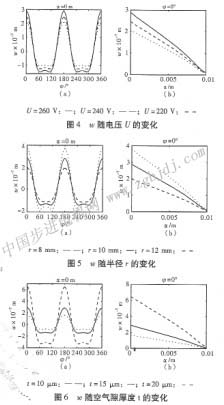
�M(j��n)һ���о�����λ��w�Sϵ�y(t��ng)����(sh��)��׃��Ҏ(gu��)�ɣ��ɵÈD4-�D6��
�ĈD4���D6��֪��
1)�ڦ�=0����=o�Ƚ����ϣ�λ��W�S늉�U�����������
2)�ڦ�=0����=o�Ƚ����ϣ�λ��w�S�돽r�����������
3)�ڦ�=0����=0�Ƚ����ϣ�λ��W���S�՚�϶���f��������pС����?y��n)�?d��ng)�՚�϶�������r(sh��)����ͬ늉��®a(ch��n)����늈�(ch��ng)����(hu��)����(y��ng)�pС��
�o��C��늙C(j��)��ݔ��Ť���S����λ�Ƶ���������C�����������ˮa(ch��n)���^���늈�(ch��ng)������ʹ��݆�l(f��)���^��ď���׃��w�������m��(d��ng)����늉�U���돽r�����M���pС�՚�϶���l��
6 �Y(ji��) Փ
�o�һ�Y(ji��)��(g��u)����ǏV���������T��MEMS�е�������ú�(qi��ng)�ķǾ��Ԇ��}��ͨ�^�����Y(ji��)��(g��u)��(ch��ng)���o늈�(ch��ng)���Ե�ƽ�ⷽ�̣��������ƽ�ⷽ�̿����������U�������(sh��)�Y(ji��)��(g��u)��(ch��ng)���o늈�(ch��ng)������P(gu��n)ϵ�������������(ch��ng)֮�g�ĽY(ji��)�c(di��n)ӳ���P(gu��n)ϵ�����Եõ��D(zhu��n)�Q���L���ڃɈ�(ch��ng)֮�g�M(j��n)��λ�ƺ����Ă��f���Y(ji��)�ϼȶ���һϵ��λ�ƺ�늉�߅��l����ͨ�^Newton�������Ԍ�(sh��)�F(xi��n)����Ԫ���̽M�ĵ�����⡣
�������c(di��n)�o������݆����λ�Ƶ�׃��Ҏ(gu��)�ɣ��Լ����Nϵ�y(t��ng)����(sh��)��(du��)����λ��׃����Ӱ푣��о��Y(ji��)�������ϵ�y(t��ng)�ij��d�����춨�˻��A(ch��)��Ҳ���M(j��n)һ���о�ԓ�N늙C(j��)�������ṩ������(j��)��
|