�����������漰С���p늙C�ӃɾS���M��λ�C��,�������D��λ���K����λ�塢�����F�K���Ƅ�늴��F ��ֱ����λ���K�����w�Ƅӌ��K�����o���Z�����D�\��늙C�����w���D���S�С��D�Ӛ��w��ֱ����늙C���z�ܡ���б�K��ֱ����܉,�������������ڷօ^��Ԫ�������p늙C�����D�\�Ӻ�ֱ���\�ӣ��Ɍ��F�ڪMС�Ŀ��g�ߴ���M�ЃɾS����λ�ơ���λ�����Fÿ�����w�ڽ�ƽ���
�ϵğoä�^������λ��ԓ�Y���]���g�t���ӣ������ƄӶ�λ��ʽ���C��λ�ķ����ԡ����ÙCеʽ��λ��ʽ�����{ÿ���_�h���ƵĜʴ_�̶ȡ������w�eС���Y����λ�������ɿ����ã������ɱ��^�ͣ��S�o���㡣�Y��������{�����Գ�һ�����ӆ�Ԫ���ܑ����ڶ��c�ܼ�ӛ� ���ӹ����y�����I�� ��
���� Ҫ���
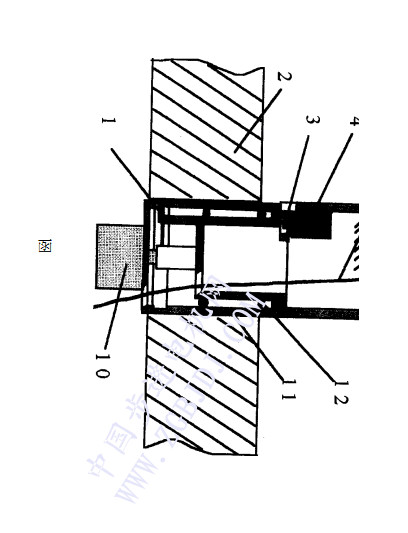
1.С���p늙C�ӃɾS���M��λ�C���������У����w5 �����w����9 ������������߀�����У����D��λ���K1 ����λ��2 �������F�K3 ���Ƅ�늴��F4 ��ֱ����λ���K6 �����w�Ƅӌ��K7 �����o����8 �����D�\��늙C10 �����w11 ���D���S��12 ���D�Ӛ��w13 ��ֱ����늙C14 ���z��15 ����б�K16��ֱ����܉17 ���������C���У����D�\��늙C10�c���w11 ���̶������w11�̶��ڶ�λ��2֮�ϣ��D���S��12λ���D�Ӛ��w13�͚��w11֮�g���D�Ӛ��w13�c���D�\��늙C10��늙C�S���B�����D��λ���K1 �c�D�Ӛ��w13���B�����b�ښ��w11�ײ��Ļ����ȣ������F�K3�ɏ���Ƭ���F�K�M�ɣ������F�K3�еď���Ƭһ�˹̶����D�Ӛ��w13֮�ϣ������F� �K3���F�Kһ���c���w11����λ�c����|��λ�ڏ����F�K3�Ϸ����Ƅ�����F4���b���D�Ӛ��w13֮�ȣ��Ƅ�늴��F4�c�����F�K3����|��ֱ����늙C14�̶����b���D�Ӛ��w13֮�ȣ�ֱ����늙C14���S�c�z��15��һ�����B�ӣ��z��15����һ��������б�K16���ݿ׃ȣ�ֱ����λ���K6�̶����D�Ӛ��w13֮�ȱڣ���λ����б�K16�\��λ���¶��c�D�����w13�ײ�����|�����w�Ƅӌ��K7λ��ֱ����܉17֮�ȣ����w�Ƅӌ��K7 �����o����8��ֱ����܉17λ���D�Ӛ��w13��픲������o����8λ�ڹ��w�Ƅӌ��K1֮�ȣ����o����8��һ�˹̶��ڹ��w�Ƅӌ��K7 �����o����8����һ�˹̶����D�Ӛ��w13�� ��
�f����
С���p늙C�ӃɾS���M��λ�C�����g�I���������͌��ڙCе�����I���漰����Ԫʽ�p늙C�ӽY���͔[�Uʽ��늙C�ӃɾS���M��λ�C���ĸ��M ��
�������g������������֮ǰ�������ю�ʼ�M���@����ĽY���о�������֮һ�ǂ��y�Ć�Ԫʽ�p늙C�ӽY�����@�N�C���� ��ÿ����Ԫ�O��һ���ɾS�әC�������ڃɾS�ӂ�����^�L���������g϶���ӣ����gռ�ò��������o���w��λ���ȺͶ�λ��������ʹ�þS�ގ����T��Ć��}����һ�N���������磺�Ї��ƌWԺ�L����C���ġ��[�Uʽ��늙C�ӃɾS���M��λ�C��������Ո̖ ��21.98.2.26437.3 �����@�N��λ�C����Ô[�Uʽ��늙C�ɾS�әC������ͬ�r������Ŀ���M��λ�ơ���λ�������Y�����Σ��������^�ߵĶ�λ���ȣ����@�N��λ�������^�L�ijx�����ڣ��y�ԝM��ʹ��Ҫ�� ��
�l�����ݣ����������͵�Ŀ���ǿ˷��������g���������L �����ܝM�㌍�Hʹ��Ҫ��Ć��}���������ֱ�ӻ��D�cֱ���ďͺ��\�Ӂ팍�F�ɾS���M��λ��������������D1��ʾ���ɻ��D��λ���K 1 ����λ��2 �������F�K3 ���Ƅ�늴��F4 �����w5 ��ֱ����λ���K6 �����w�Ƅӌ��K7 �����o����8 �����w����9 �����D�\��늙C10 �����w11 ���D���S��12 ���D�Ӛ��w13 ��ֱ����늙C14 ���z��15 ����б�K16��ֱ����܉17�M�ɣ��������C���У����D�\��늙C 10�c���w11�̶������w 11�̶��ڶ�λ�� 2֮�ϣ����S�� 12λ���D�Ӛ��w 13�͚��w 11֮�g���D�Ӛ��w 13�c���D�\��늙C 10��늙C�S���B�����D��λ���K 1�c�D�Ӛ��w13���B�����b�ښ��w 11�ײ��Ļ����ȣ������F�K3�ɏ���Ƭ���F�K�M�ɣ������F�K3�еď���Ƭһ�˹̶����D�Ӛ��w 13֮�ϣ��� ���F�K3���F�Kһ���c���w 11����λ�c����|��λ�ڏ����F�K 3 �Ϸ����Ƅ�늴��F4���b���D�Ӛ��w 13֮�ȣ��Ƅ�늴��F4 �c�����F�K 3����|��ֱ����늙C 14�̶����b���D�Ӛ��w 13֮�ȣ�ֱ����늙C 14���S�c�z�� 15��һ�����B�ӣ��z�� 15����һ��������б�K 16���׃ȣ�ֱ����λ���K 6�̶����D�����w13֮�ȱڣ���λ����б�K16�\��λ���¶��c�D�Ӛ��w13 �ײ�����|�����w�Ƅӌ��K1λ��ֱ����܉ 17֮�ȣ����w�Ƅ����K7 �����o����8��ֱ����܉ 17λ���D�Ӛ��w 13��픲������o����8λ�ڹ��w�Ƅӌ��K7֮�ȣ����o����8��һ�˹̶��ڹ��w�Ƅӌ��K7 �����o����8����һ�˹̶����D�Ӛ��w 13�� ��
һ�����������͵ęC���\��ԭ�� ��
1 �����D�\��ԭ����
���D�\��늙C�c���w���B�̶��ڶ�λ���ϣ����D�\��늙C��늙C�S�c�D�Ӛ��w���B�ӣ���늙C��360 �������������ͻ��D�r�������D�Ӛ��w��λ����픶˵Ĺ��w�Ƅӌ��K�����o���ɡ����w���
�ۺ�ֱ����܉��360 �������������ͻ��D�\�ӡ�
2 ��ֱ���\��ԭ����
ֱ���Ӝp������늙C�̶����b���D�Ӛ��w֮�ȣ��z�ܵ�һ�˹̶�����늙C�S֮�ϣ��z�ܵ���һ��������б�K���ݿ׃� ��
����б�K̎����λ�r�����w픶�λ���D�Ӛ��w�ĈA��̎����ֱ���Ӝp������늙C�������D�ӕr���z���S֮�D�ӣ��z���D�ӌ��Ƅ���б�K����������б�K��б�挢�Ƅӹ��w�Ƅӌ��K�Bͬ���w������ֱ����܉�����\�ӡ��������o���ɵ����ã�ʹ���w���ӌ��Kʼ�K�o�N����б�K��б���ϡ����ԣ���ֱ���Ӝp������늙C�������D�ӕr���z�܌�ʹ��б�K�½������w�Ƅӌ��K�Bͬ���w���ی���ֱ����܉����㷽���\�� ��
�������������͵��Ƅ�ԭ��
�鱣�C�C�������������ڻ��D�\�әC���ȼ����ƄӽY������Ô���ƄӽY�������C��λ��ķ����ԡ���ϵ�yͨ늕r���Ƅ�����F���ƄӾ�Ȧͨ늲��a��늴ň����������F�K���F�K������ ���D�Ӛ��w�������D�ӡ���ϵ�yֹͣ��������늕r���Ƅ�늴��F���ƄӾ�Ȧ��늣�늴ň���ʧ�������F�K���F�K�˻����c���w����|�����ڏ����F�K�c���w֮�g����Ħ�������Ķ�ʹ���D��λ���� ���
�������������͵���λ�_��ԭ��
�鱣�Cÿ�ζ�λ���`��ۼӣ��ڻ��D�\�Ӻ�ֱ���\�әC���Ⱦ�����Cе��λ�Y����ÿ�ι��w��λǰ���D�\�Ӻ�ֱ���\�ӽY�������Ȼ��㣬Ȼ�����M���_�h�����Ӷ�λ���Դˁ����C������ÿ���_�h���ƵĜʴ_�̶� ��
1 �����D��λԭ�����ښ��w�ĵײ��ȱ��ϼӹ�һ�@���w360 ���İ��ۻ���������������ʽ���O������Y�������D�Ӛ��w�ĵײ����b���D��λ���K�����D��λ���K���ڰ��ۻ�������360 �����������ͻ��ӡ����D�\�Ӝp������늙C�����D�\�ӕr�����D��λ���K�S֮�D�ӣ������D��λ���K�D������������Y���r��������D�\�ӵ���λλ�� ��
2 ��ֱ����λԭ���������w����̎���D�Ӛ��w�A�ĕr��λ�ö���ֱ����λ���˕r��б�KҲ̎����λ������б�K�ĵײ����bֱ����λ���K��ÿ����б�K������ֱ����λ���K̎�r������ϵ�y��ֱ���\�ӵ���λλ�� ��
�������������ڷօ^��Ԫ�������p늙C�����D�\�Ӻ�ֱ���\�ӣ��Ɍ��F�ڪMС�Ŀ��g�ߴ���M�ЃɾS����λ�ơ���λ�����Fÿ�����w�ڽ�ƽ���ϵğoä�^������λ�����ڲ������o���ɽY��ʹ���������͛]���g϶���ӣ�����ƄӶ�λ��ʽ���C��λ�ķ����ԡ���ÙCеʽ��λ��ʽ�����ÿ���_�h���ƵĜʴ_�̶ȡ������w�eС���Y����λ�������ɿ����ã������ɱ��^�ͣ��S�o���㡣�Y������ȸߡ����Գ�һ�����ӆ�Ԫ���ܑ����ڶ��c�ܼ�ӛ䛡��ӹ����y�����I�� ���
���D�f�� ��
�D 1�DZ��������͵ĽY��ʾ��D��ժҪ���D����ÈD1 ��
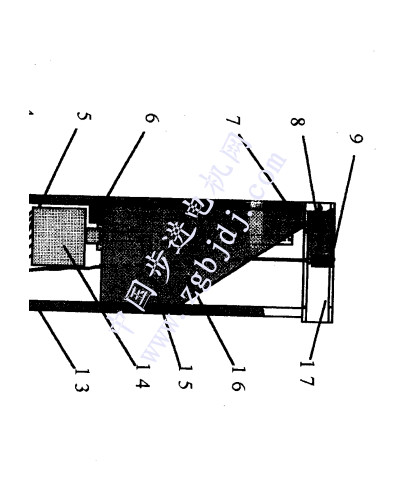
���w��ʩ���D 1��ʾ���ɻ��D��λ���K1 ����λ��2 �������F�K3 ���Ƅ�늴��F4 �����w5 ��ֱ����λ���K6 �����w�Ƅӌ��K7 �����o����8 �����w����9 �����D�\��늙C10 �����w11 ���D���S��12 ���D�Ӛ��w13 ��ֱ����늙C14 ���z��15 ����б�K16 ��ֱ����܉ 17�M�ɡ����������Ͳ��ÈAͲ�νY�������D��λ���K 1��� 65����ϣ���λ�� 2���45# 䓲��ϣ������F�K 3���10#䓲��ϣ��Ƅ�늴��F4����~���@���� 10#��Fо�����w5�ɸ���ʹ��Ҫ���x�ø��N���w��ֱ����λ���K6���45#䓲��ϣ����w�Ƅӌ��K7����45#䓣����o����8����651^ �����w����9���45#䓣����D�\��늙C 10�����Ͳ��M늙C�����w 11 ���45#䓣��D���S�� 12���0�������������ּܣ��D�Ӛ��w 13���35#䓣�ֱ����늙C 14������Ͳ��M늙C���z��15.���45#䓣���б�K16���962���ϣ�ֱ����܉17���45#䓲��ϡ�
|











