�� �� Ҫ �� ��
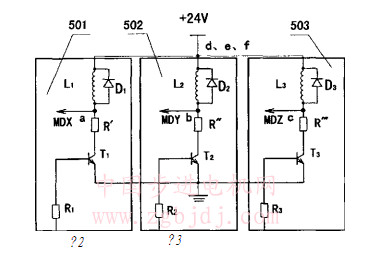
1.һ�N�C���Ʋ��M늙C�����������������ں��нY���ͅ�������ͬ�ĵ�һ��ģ�K(501)���ڶ���ģ�K(502)�͵�����ģ�K(503),ÿ����ģ�K(501 ��502 ��503)�к���һ�����O��(T1 ��T2��T3)��������ģ�K(501 ��502 ��503)���������O��(T1��T2��T3)�Ļ��O�քe��һ���( R1��R2��R3)�c�C���пڵĴ�ӡ�C(LPT)���^(6)�Ķ�������������(P2��P3��P4)��_���B���������O��(T1��T2��T3)�ļ�늘O�քe��һ�������(R1��R2��R3)�c���M늙C�������Ӿ�����a��b��c�����B��ÿ����ģ�K501 ��502 ��503�к��зքe�c���M늙C��4���������@�ML1��L2��L3���Ķ��O�ܣ�D1��D2��D3�� �����M늙C�����������Ӿ���(d��e��f)�B��24����ֱ���Դ ��
�f �� ��
�C���Ʋ��M늙C������
���g�I�� ��
���l���漰һ�N���M늙C���������e���漰һ�N���C���Ʋ��M��C��������ԓ������Ҫ������Ɍ����M늙C�������D�ӣ��D�ٵĿ��� ��߀���Ԍ��F�����L���{�� ��
�������g ��
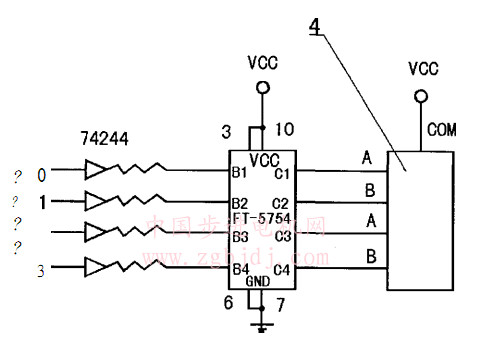
���ڲ��M늙C������Ŀǰ������Dz��Æ�Ƭ�C�Y�ϲ��M늙C����оƬ�����Կ��Ƶġ������õĽY��������ڈD1��ʾ�ĽY��(��Ҋ���ȼ��g������Ƭ�C8051�����c���á���p207 �����һ͡��S���������IJ������Ї�ˮ��ˮ늳�����2001��6�£�) �������D1��ʾ��ģ�K3�Ĵ�5754ݔ�������3111 �����ϣ���Ҫ�þ��_��2���Ƅӣ�����õĽM����405074244�ȡ����ЈD2��ģ�K3��115754�Ӳ��M늙C4���·�D�����@�N�Y���Ӳ��M늙C4��Ҫ��һ����Ƭ�C1��8051����8031�����ƣ�����Ƭ�C1���̺��ӳ����̻��Ժ����Ɍ����M늙C�Ŀ��ƣ��@�N�Y����ȱ�c����ه�چ�Ƭ�C1 ��������������߀Ҫ���~�������I�P���߰��o������������߷����o���O�����ȵ����o�ȵȣ��ܲ����㣬����ÿ���Ķ������¹̻�һ�Σ��������Ҳ������ ��
�l������ ��
���˿˷��������ȼ��g���Æ�Ƭ�C���Ʋ��M늙C4��������ȱ�c�����l���ṩһ�N�C���Ʋ��M늙C������ ��
���l����������Ҫ���нY���ͅ�������ͬ�ĵ�һ��ģ�K501�ڶ����ģ�K5 0 2�͵�����ģ�K5 0 3ÿ����ģ�K5 0 1 5 0 2 5 0 3 �к���һ�� �O��T1�� T2 ��T3 ��������ģ�K501 02603�е����O��T1��T2 �����Ļ���O�քe��һ���R1�� R2 ��R3 �c�C���пڵĴ�ӡ�C���^6�ĵڶ������������ģ�P2 P3 P4��_���B���������O�� TI2V��T3�ļ�늘O�քe�� һ��������ʡ�V ���c���M늙C4�������Ӿ���3 ģ�K5 0 1 5 0 2 5 0 3 �к��зքe�c���M늙C4 �������@�M�����O��ꠣ����M늙C4�����������Ӿ����B��24����ֱ���Դ����D3-1�D3-2 ��ʾ ��
���l�������C���Ʋ��M늙C���������ĈD3��ʾ�����l�����������нY���ͅ�������ͬ�ĵ�һ��ģ�K501� �ڶ���ģ�K502�͵�����ģ�K503 ���f�ĵ�һ���ڶ���������ģ�K501 502 503�քe�������O����3�ͷքe�c���M늙C4�ȵĵ�һ�@�M �O��ꠡ���ģ�K501 502��503���������O���ˡ���2 ��7�ļ�늘O�քe����������衢�x����քe�B�ӵ����M늙C4�ĽӾ���3 ��5��0�ϡ����M늙C4�����������Ӿ����B��24����ֱ���Դ ����ģ�K5 0 1 5 0 2��5 0 3 �����O��T1 T2 T3 �Ļ��O�քe�������R1 R2 R3 ����B���C��ӡ�C���пڵĽ��^6����_���B ��
���������r��������^6���C�Ĵ�ӡ�C���пڡ����B���^���յ����C�l���ġ�1���}�_�r����һ�����������ģ�K5 0 1 5 0 2 5 0 3 �е����O��3��̎�ڌ�ͨ��B���˕r���M�C4�о�̎�ڹ�����B�� ���O��T1��T2��T3�γ�һ��ͨ·����R1��R2��R3���յ������C�l������0���}�_�r�������늉��r����һ����������ģ�K501 502��503�е����O��T1��T2��T3��̎�ڽ�ֹ��B�����M늙C4�еĵ�һ���ڶ��������@�M�� ���O���ɡ�02 ��03�γɷ�늻�·�������O��T1��T2��T3���o���ã���ֹ���O��T1��T2��T3�������������^1��_���յ������C�l�́�����̖����0��1������׃���r�����M늙C4������3 0�ͽ����ͨ���Ķ����M늙C4�͕��\�D��ͨ�^ʹ���^���յ���4�ϵ���̖��Ҏ�ɵذ���0����1��׃�������M늙C4�͕���Ҫ���\�D�����������^�̷������С��������Ҳ�ܷ��㣬�����Z��Ҳ�����ɣ�������****�����Z�Ծ����������Ѻõ�ܛ�������Һ������e�ij���ģ�K�Ϳ����@�����M늙C��ܛ���Y����һ�����ܛ�����ںϣ�ܛ������ֲ�ԏ��ă��c�Ϳ����l�]���� ���c���ȼ��g�ȣ����l��������ֻ��ʹ�ìF�е��C�IJ��оͿ��Ԍ��F�����M늙C4���ƣ����Ҿ��̵Č��F�����ܶ࣬�����x��ܶ�N�����Z�� ���������·�����������������ף����x��������Ҫ���������O������T1��T2��T3 ���������O��ꠡ�02 ��03 ��һ����6ֻ��裬���ǘO��Ҋ�ġ������ڬF�� �IJ��п�ֻ��һ����ǰ���£������ú܃r���Ĕ����D�Q�����ܷ������ɴ�ӡ�C�Ͳ��M늙C�����������ГQ�������O����з��� ��
�D1�����ȼ��g�е�ģ�K3�飿15754�����·����D ��
�D2�����ȼ��g�е�ģ�K3�飿75754���Ӳ��M늄әC���·�D ��
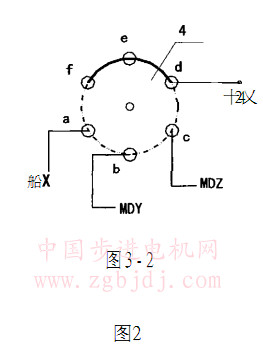
�D3�鱾�l���C���Ʋ��M늙C�������ľ�·�Ͳ��M늙C4�Ӿ�����
����D ��
���ЈD3-1�鱾�l�������ľ�·ʾ��D���D3-2�鲽�M늙C4�ĽӾ����
����D ��
���w��ʩ��ʽ
��D3��ʾ��3�����O����T1��T2��T3��3�����O��1 ��02 ��03 ��3���������һ�����п� �����Dʾ��ʽ�Ӿ����x�ò��п����_�Ͳ��M늙C�ĽӾ���3 0���B����������24��ֱ���Դ�����M늙C4�IJ��Ǟ�0.9�ȣ������0.2���ࡣ���O��ꠡ�02 ��03���������� ��늙C��Ȧ��늸еķ�늄ӄݵ�Ӱ푣���T1��T2��T3�_ͨ�r����Юa��һ����늄ӄ���ֹ��������ӣ���ɲ��M늙C�ĸ������Բ����������O��T1��T2��T3�P�]�r����������R����ʧ���˕r��늄ӄ����1�ݣ����a��һ���ܸߵĸБ�늉������ֱ�Ӽ������O��T1��T2��T3�Ͼ�����ʹT1��T2��T3�������������϶��O��01 ��02 ��03�r���Ϳ���������늄ӄݡ������O��T1��T2��T3�_ͨ�r��0 1��02 ��03������ƫ�����ʸ��迹�����·�oӰ푣���T1��T2��T3̎���P�]��B�r��ֻҪ�Б�늉����^0.7����01 ��02 ��03�ʹ��_���ṩһ������·�����M늙C��3���Ӿ��������B����һ��24����ֱ���Դ�ϡ��ڱ���ʩ���У��������O�ܶ����õ��� T1��T2��T3���������O�ܶ����õ���4007 ��