�����������漰һ�N�z�y�b�ã������漰һ�N�z�y�oˢֱ��늙Cλ�õ� �oˢֱ��늙Cλ�Ùz�y�b�á�
ֱ��׃�l���s�C�Ȳ�ͨ������ֱ���oˢ늙C(BLDC)������ӕr���P �I�Ć��}������Ҫ���_�ؙz�yֱ��늙C������λ����̖��
Ȼ�����λ����̖ �M�ГQ�ࡣ
Ŀǰ��һ��ֱ��늙C���b��λ�Ùz�y�·���������������
������һЩ ��늙C�ȟo�����bλ�Ùz�y�·�ĮaƷ���牺�s�C��������ⲿ�M��λ�Ùz �y��
�F�ڇ��Ȍ�ֱ��׃�l���s�Cλ�Ùz�y��ԭ����ͬС����һ�㶼���øБ� ��늄��^���c�z�y��
���ǣ��@�N�z�y������Ҫ���������࣬�·�������y�� �Cһ�£�Ȼ�����ڼ��g�ϣ�
�P�IҪ�_���·�������{��λ����̖�Q���c���� �t�r�g��ʹ�ГQ�r�_������M���p�١�
�ڬF�м��g��ֱ�����s�C���У��F �е���λλ�Ùz�y�`��Լ���λ���t�r�g�IJ��yһ��
��ʹ���s�C�ēQ��� ���_���ӴĶ�ʹ���s�C��Ч���½���
���������͵�Ŀ�������ṩһ�N���M�ğoˢֱ��늙Cλ�Ùz�y�b�ã�
�� �������Ԫ�������ľ��_�Ժ�һ���ԣ�����λ�Ùz�y�·�ķ����ԡ��ɿ��ԡ� һ���ԣ�
��߉��s�C��ϵ�y��Ч�ʣ�����ʹ��Ҳʮ�ַ��㡣 ���������͵�Ŀ�����@�ӌ��F�ģ�
һ�N�oˢֱ��늙Cλ�Ùz�y�b�ã����ڙz�y�oˢֱ��늙C��λ����̖��
��������Ĥ�⚤���Լ��O���ں�Ĥ�⚤�еęz�y�·�������c�ǣ�
�����ęz�y�·�������e���·����λ�·�����^�����V���·�����У�
�����ķe���·�cݔ�����B�ӣ�����R38��R40������Լ��քe�c�����
�B�ӵ�C17��C019����ݽM�ɣ���������λ�·�c�e���·��B�ӣ�
����D13�� D14��D15��D16����λ���O�ܽM�ɣ������ı��^���c�e���·����λ�·��B�ӡ�
��������O���Ă����^�·�ļ����·��IC2�c���C20���ɣ�
�����ĞV ���·�c���^����B�ӣ�����R41��R46����輰C14��C16����ݽM�ɡ�
��������һ�N�oˢֱ��늙Cλ�Ùz�y�b���У����У������ęz�y�·߀
������һ���ίB���·��һ�����·�����������ίB���·�cݔ��˺ͷe�� �·��B�ӣ�
����R47��R49�����M�ɣ������քe�c�e���·�������R38 ��R40�B�ӣ�
�����������·�cݔ��˺ͷe���·��B�ӣ�����R35��R37 �����M�ɣ�
�����քe�c�e���·23�������R38��R40�����ίB���·25�������R47��R49������B�ӡ�
���������͟oˢֱ��늙Cλ�Ùz�y�b����������������ļ��g����ʹ��
��ֱ��׃�l���s�C�ӿ������У�ʹ֮�c�F�м��g��������Ⱦ������@�ă� �c�ͷe�OЧ����
����������������ú�Ĥ�·���g�����Ɍ���оƬ����Ȳ� �����NƬ��ݣ������{�裬
ʹ֮Ԫ���������_��һ�£�ͬ�r����ֱ��׃�l�� �s�C�ӿ������У�
������λ�Ùz�y�·���÷���Ԫ������ɵ��������ࡢ ӡˢ�·����e����
һ���Բ��õ�ȱ�ݣ����ң���������λ�Ùz�y�·�� �����ԡ��ɿ��ԡ�һ���ԣ�
����ˉ��s�C��ϵ�y��Ч�ʣ����⣬�ڌ��H�� ���У��䰲�b���Σ�ʹ�÷��㣬
���ӿ��ˮaƷ�_�l���ڡ�
ͨ�^���������������oˢֱ��늙Cλ�Ùz�y�b�õ�һ��ʩ���Y���丽 �D��������
�����Mһ�����Ȿ�������͵�Ŀ�ġ����w�Y�������̓��c�����У� ���D�飺
�D1�DZ��������͟oˢֱ��늙Cλ�Ùz�y�b�Ñ�����ֱ��׃�l���s�C� �ӿ������е�ʾ��D��
�D2�DZ��������͟oˢֱ��늙Cλ�Ùz�y�b���е����νY��ʾ��D��
�D3�DZ��������͟oˢֱ��늙Cλ�Ùz�y�b���Йz�y�·���ԭ��D��
�D4�DZ��������͟oˢֱ��늙Cλ�Ùz�y�b���Йz�y�·�ĸ���̖���ΈD��
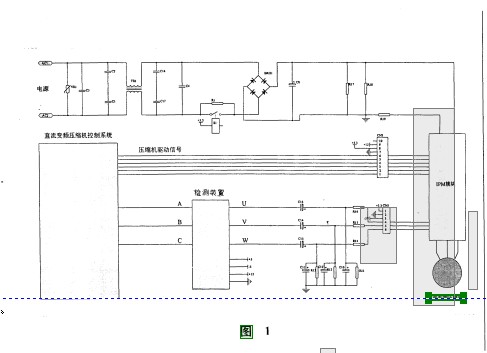
��D1��ʾ���@�DZ��������͟oˢֱ��늙Cλ�Ùz�y�b�Ñ�����ֱ��׃�l���s�C�ӿ������е�ʾ��D��
��ֱ��׃�l���s�C�ӿ������У����s�C �����ܹ���ģ�K��IPM���ӣ�
ϵ�y�ṩ���������͟oˢֱ��늙Cλ�Ùz�y�b�� �Ĺ����Դ��
���������͙z�y���s�C�Ķ�늉����a��A B C����λ����̖��
ֱ��׃�l���s�C�ӿ����������oˢֱ��늙Cλ����̖��A+ A-B+ B- C+
C-����Ͻo������������̖��
��D2��ʾ���@�DZ��������͟oˢֱ��늙Cλ�Ùz�y�b���е����νY�� ʾ��D��
�D�У���̖1�鱾�������͟oˢֱ��늙Cλ�Ùz�y�b�õĺ�Ĥ�⚤,
ԓ��Ĥ�⚤1��һ���O�������������_10������ݔ���_11��ݔ���_12������ �Դ�����_13��
��ԓ��Ĥ�⚤1���O���Йz�y�·2��
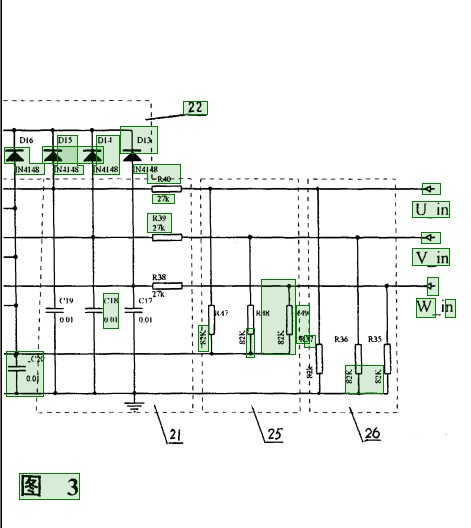
��D3��ʾ���@�DZ����������oˢֱ��늙Cλ�Ùz�y�b���Йz�y�·�� �ԭ��D��
���������͟oˢֱ��늙Cλ�Ùz�y�b�õęz�y�·2��Ҫ������ ����
�����ęz�y�·2�������e���·21����λ�·22�����^��23���V��� ·24�����У�
�����ķe���·21�cݔ�����B�ӣ�
����R38��R40������Լ��քe�c������B�ӵ�C17��C19����ݽM�ɣ�
��������λ�·22�c�e���·21��B�ӣ�����D13��D14��D15��D1����λ���O�ܽM�ɣ�
�����ı��^��23�c�e���·21����λ�·22��B�ӣ�
��������O���Ă����^�·�ļ����·IC2�c���C20���ɣ��ڱ����������У�
�����·IC2��õ���LM339���^���������ĞV���·24�c���^��23��B�ӣ�
����R41��R46����輰C14 ��C16����ݽM�ɣ���������λ�·24�c���^��22�ͷe���·23�B�ӣ�
����D13.D14.D15.D16����λ���O�ܽM�ɡ������ęz�y�·2߀������
һ���ίB���·25��һ�����·26�����������ίB���·25�cݔ��˺ͷe���·23��B�ӣ�
����R47��R9�����M�ɣ������քe�c�e���·23������肃R38��R40�B�ӣ�
�����������·26�cݔ��˺ͷe���·23��B�ӣ�����R35��R37�����M�ɣ�
�����քe�c�e���·23�������R38��R40 �����ίB���·25�������R47��R49������B�ӡ�
Ո�Y�ψD3��Ҋ�D4��ʾ�����ЈD4�DZ��������͟oˢֱ��늙Cλ�Ùz�y�b���Йz�y�·�ĸ���̖���ΈD��
�D�У�A+ A- B+ B- C+ C-��������̖��u-in��U��Б�늉���n��B����̖��u��e����̖��A�ГQ��̖��
�����������oˢֱ��늙Cλ�Ùz�y�b�õęz�y�·�Ĺ���ԭ���ǣ�
u_in v_in w_in�lj��s�C�oˢ늙C�ĸБ���늄ݣ�
u_inͨ�^R40��C19 �e�֣�v_inͨ�^R39��C18�e�֣�w_inͨ�^R38��C17�e��,
u_in v_in w_in��·�e����̖����λ���120�ȵ����Dz���ͬ�r����Б���̖ͨ�^���������B�ӣ�
�B�Ӯa��3���l��С�����Dz�N.U��ķe����̖�c�B����̖ͨ�^LN339 ���^����
�õ��������ГQ�cA������A��̖�����Ա���늙C�Ә�۵��ГQ��
��A�������أ���A+ B-�ГQ��A+ C-��A���½��أ���B+ A-�ГQ��C+ A-��
ͬ��V��W�ķe����̖�c�B����̖���^Ҳ�a�����������ГQ�c��
���^���� ݔ����̖��ͨ�^C16��C15��C14�V�����a������λ����̖(A B C)��
�oֱ��׃�l���s�C����ϵ�y��̎�������ã�
��ֱ��׃�l���s�C����ϵ�y�е�̎��������A B C������̖�܉�ܷ�����M����λ�D�Q��
ʹֱ��׃�l���s�C�����\�D��
�C�����������������͟oˢֱ��늙Cλ�Ùz�y�b��������ú�Ĥ�·�� �g�����Ɍ���оƬ��
��Ȳ������NƬ��ݣ������{�裬�����Ԫ�������ľ��_�Ժ�һ���ԣ�
������λ�Ùz�y�·�ķ����ԣ��ɿ��ԣ�һ���ԣ�����ˉ� �s�C��ϵ�y��Ч�ʣ�
�����Ñ�ֻҪ�ṩ����������оƬ�Ĺ����Դ(+5V +12V -5V),
��ݔ����B�Ӊ��s�C��늉�������̖(u_in v_in w_in)��
���������͵Č���оƬ���ܮa������λ����̖��ʹ��Ҳ׃��ʮ�ַ��㡣


|
|
 |
�YӍ��������� �RС��
�Ԓ��18801063276 13811333979
qq̖��928221169
�Ԍ�id: �r����Ⱥ66
�Ԍ���䁣�http://timemotor.taobao.com/ | |











